 -
-
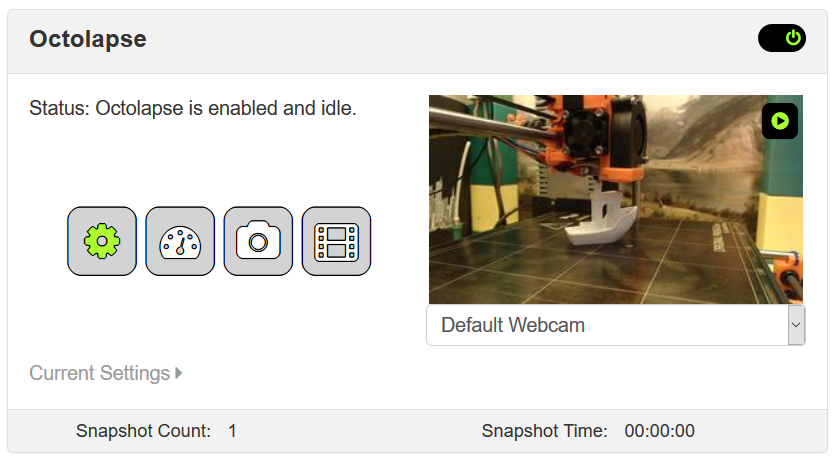
- The Octolapse Tab
-
- -
-
-  -
-
- Create a stabilized timelapse of your 3D prints. Highly customizable, loads of presets, lots of fun.
-
-
-
-
-
-
-
-
-
-
-
- Error loading the stream at: " + options.src + " Check the 'Stream Address Template' setting in your camera profile. No stream url was provided. Check the 'Stream Address Template' setting. No stream url was provided. Check the 'Stream Address Template' setting. Loading webcam stream at: " + options.src + " Loading webcam stream at: " + self.src + " Error loading the stream at: " + src + " Check the 'Stream Address Template' setting in your camera profile. No stream url was provided. Check the 'Stream Address Template' setting. "),l+=" tags around block-level tags.
+ text = showdown.subParser('hashHTMLBlocks')(text, options, globals);
+ text = showdown.subParser('paragraphs')(text, options, globals);
+
+ text = globals.converter._dispatch('blockGamut.after', text, options, globals);
+
+ return text;
+});
+
+showdown.subParser('blockQuotes', function (text, options, globals) {
+ 'use strict';
+
+ text = globals.converter._dispatch('blockQuotes.before', text, options, globals);
+
+ // add a couple extra lines after the text and endtext mark
+ text = text + '\n\n';
+
+ var rgx = /(^ {0,3}>[ \t]?.+\n(.+\n)*\n*)+/gm;
+
+ if (options.splitAdjacentBlockquotes) {
+ rgx = /^ {0,3}>[\s\S]*?(?:\n\n)/gm;
+ }
+
+ text = text.replace(rgx, function (bq) {
+ // attacklab: hack around Konqueror 3.5.4 bug:
+ // "----------bug".replace(/^-/g,"") == "bug"
+ bq = bq.replace(/^[ \t]*>[ \t]?/gm, ''); // trim one level of quoting
+
+ // attacklab: clean up hack
+ bq = bq.replace(/¨0/g, '');
+
+ bq = bq.replace(/^[ \t]+$/gm, ''); // trim whitespace-only lines
+ bq = showdown.subParser('githubCodeBlocks')(bq, options, globals);
+ bq = showdown.subParser('blockGamut')(bq, options, globals); // recurse
+
+ bq = bq.replace(/(^|\n)/g, '$1 ');
+ // These leading spaces screw with Just type tags
+
+ for (var i = 0; i < end; i++) {
+ var str = grafs[i];
+ // if this is an HTML marker, copy it
+ if (str.search(/¨(K|G)(\d+)\1/g) >= 0) {
+ grafsOut.push(str);
+
+ // test for presence of characters to prevent empty lines being parsed
+ // as paragraphs (resulting in undesired extra empty paragraphs)
+ } else if (str.search(/\S/) >= 0) {
+ str = showdown.subParser('spanGamut')(str, options, globals);
+ str = str.replace(/^([ \t]*)/g, ' ');
+ str += ' It is highly recommended that you take the time to configure these settings since they can make a big difference in the quality of your timelapse, and reduce the required snapshot delay. Custom image preferences are only available for USB web-cameras running on mjpg_streamer (the raspberry pi camera module is not currently supported). Consider using a custom 'Before Print Start Script' or try using a web camera running on mjpg_streamer. Custom image preferences are only available when using the 'Webcam' Camera Type setting above. It may be possible to use the 'Before Print Start Script' script above to configure your camera. +## Getting Started
+
+Be sure to [read the getting started guide](https://github.com/FormerLurker/Octolapse/wiki/V0.4---Getting-Started) on the [Octolapse Wiki](https://github.com/FormerLurker/Octolapse/wiki). This will save you a lot of hassle and allow you to unlock some of the best features of Octolapse.
+
+
+
+
+
+## Recent Changes
+
+A **lot** has changed since the last release (v0.3.4). Over **18** months of development and over 600 commits went into this newest version. If you've had trouble installing or running Octolapse in the past, you just might want to try it again!
+
+I have been focusing on 3 items for V0.4:
+
+1. **Print Quality** - This is my #**1** concern, and a ton of effort has gone into reducing artifacts.
+2. **Print Time** - Lots of folks have complained about the print time impact of Octolapse, and this is a totally legitimate concern. This has been handled by adding new *Smart* triggers that minimize travel distance. In fact, the new *Smart - Snap To Print* trigger *completely eliminates* travel moves from the stabilization!
+3. **Simplify Setup** - Prior to V0.4, Octolapse was much more difficult to configure, especially for beginners. Incorrect setup leads to poor print quality as well as extreme frustration. This sad situation has been improved (but not completely solved) in several ways, including automatic slicer settings extraction and profile import/export/update functionality.
+
+## Highlights of V0.4
+
+### Python 3 and Octoprint 1.4.0 Support
+
+Octolapse now runs on the newest versions of Python and is still backwards compatible with Python 2.7. Additionally, Octolapse runs on the newest version of OctoPrint.
+
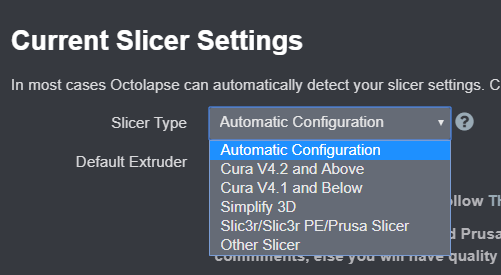
+### Automatic Slicer Settings Detection
+
+Octolapse can now extract all the required slicer settings directly from your GCode file. You no longer need to copy your slicer settings into Octolapse before every print. This is my favorite new feature!
+
+
+## Getting Started
+
+Be sure to [read the getting started guide](https://github.com/FormerLurker/Octolapse/wiki/V0.4---Getting-Started) on the [Octolapse Wiki](https://github.com/FormerLurker/Octolapse/wiki). This will save you a lot of hassle and allow you to unlock some of the best features of Octolapse.
+
+
+
+
+
+## Recent Changes
+
+A **lot** has changed since the last release (v0.3.4). Over **18** months of development and over 600 commits went into this newest version. If you've had trouble installing or running Octolapse in the past, you just might want to try it again!
+
+I have been focusing on 3 items for V0.4:
+
+1. **Print Quality** - This is my #**1** concern, and a ton of effort has gone into reducing artifacts.
+2. **Print Time** - Lots of folks have complained about the print time impact of Octolapse, and this is a totally legitimate concern. This has been handled by adding new *Smart* triggers that minimize travel distance. In fact, the new *Smart - Snap To Print* trigger *completely eliminates* travel moves from the stabilization!
+3. **Simplify Setup** - Prior to V0.4, Octolapse was much more difficult to configure, especially for beginners. Incorrect setup leads to poor print quality as well as extreme frustration. This sad situation has been improved (but not completely solved) in several ways, including automatic slicer settings extraction and profile import/export/update functionality.
+
+## Highlights of V0.4
+
+### Python 3 and Octoprint 1.4.0 Support
+
+Octolapse now runs on the newest versions of Python and is still backwards compatible with Python 2.7. Additionally, Octolapse runs on the newest version of OctoPrint.
+
+### Automatic Slicer Settings Detection
+
+Octolapse can now extract all the required slicer settings directly from your GCode file. You no longer need to copy your slicer settings into Octolapse before every print. This is my favorite new feature!
+
+ +
+
+
+ View the Getting Started Guide Companion Video
-
-
- A timelapse of a double spiral vase made with Octolapse
+
+
+
-## More Octolapses
- +
+
+
+ Automatic Slicer Settings Configuration
-
-
-
-## Octolapse was designed with print quality in mind
-* **Continuous tracking** of the X,Y, and Z axes. Octolapse knows where your extruder and bed will be at all times.
-* **Extruder state detection** enables Octolapse to choose a good time take a snapshot, minimizing defects.
-* Choose from dozens of existing **presets,** or use a **custom configuration** to maximize quality for your specific application.
-* Customizable **Z-Hop and retract detection** to reduce stringing, maximizing quality.
-* **Configurable stabilizations** allow you complete control of the X and Y position of each snapshot. You can choose a position as close to or as far away from your part as you wish.
-* **Minimal impact on print time and print quality.** Octolapse normally takes between one and three seconds to take a snapshot. It even reports exactly how much time it's using after each snapshot!
-* Use **High Quality Mode** to prevent snapshots over exterior perimeters using the new fully customizable **Feature Detection**.
-* Allow or prevent snapshots in certain areas with **snapshot position restrictions.** This can be used to prevent snapshots over critical areas of your print or a delicate part.
-* If you have a multi-material printer, you can even **restrict snapshots movements to your wipe tower**, virtually eliminating any quality considerations!
-* Octolapse can **calculate intersections** between the printer path and any snapshot position restriction, allowing a snapshot even in the middle of an extrusion.
-* **Stop the timelapse whenever you want!** If things go awry, you can prevent Octolapse from taking any further snapshots for the rest of the print. It will wait to render any snapshots that were already taken until after the print has finished.
-* Use **test mode** to try out your timelapse settings without heating your bed or nozzle, turning on any fans, or extruding any filament. This saves time and plastic. It's also very useful for development and testing.
-## Octolapse was also designed to make great timelapses
-* **Synchronize your timelapses** with OctoPrint's built in plugin, keeping all of your videos in one place.
-* Choose between **fixed frame rate** or **fixed length rendering.** Octolapse will automatically adjust the frame rate to match any desired length. You can even set a minimum or maximum acceptable frame rate.
-* Add **pre or post roll frames** (not videos yet, sorry) to your snapshot preventing an abrupt start or finish.
-* Choose from several output formats including **MP4 (libxvid and H.264), AVI, FLV, VOB, GIF, and MPEG.** *More coming soon, suggestions welcome.* _Note: *OctoPrint 1.3.10 is required to synchronize some formats with the built-in timelapse plugin.*_
-* **Control the bitrate** of your video.
-* Add a **Custom Watermark** to your video.
-* Add **Text Overlays** to your video using replacement tokens. Control the position, color, font and more!
-* Control the number of **rendering threads** to reduce rendering time.
-## To make good timelapses, you need good snapshots
-* Slow camera or low frame rate? Octolapse allows you to **set a snapshot delay** before taking a snapshot to allow your camera enough time to get a clear image.
-* **Control your camera settings** when using [mjegstreamer](https://sourceforge.net/projects/mjpg-streamer/) including: contrast, brightness, focus, white balance, pan, tilt, zoom, and much more. You can apply your custom settings before each print.
-* **Rotate, flip, and transpose your snapshots**
-* Use custom camera scripts to **trigger a DSLR**, post-process images, configure your camera, turn lighting on and off, control **GPIO**, or practically anything you can think of! Five script types are available.
-* Use **Multiple cameras** to create multiple timelapses.
-* Send gcode to your printer when it's time to take a snapshot via the new **Gcode Camera Type**. Supports for the **M240** gcode!
-## Simplified Setup and Better Compatibility
-* Select your **slicer type** to simplify printer setup by making the setting names and units match your slicer! Cura, Simplify 3d and Slic3r PE are fully supported.
-* Enhanced and **simplified error reporting** and informational panels.
-* All settings include links to the **Octolapse Wiki**, so you can get to the documentation quickly if you have questions.
-* Octolapse now works with **Themeify**.
-
-# Installation
-
-[Read the installation instructions.](https://github.com/FormerLurker/Octolapse/wiki/Installation)
-
-After installation, [checkout the project's wiki pages](https://github.com/FormerLurker/Octolapse/wiki). It never hurts to know more about what you're doing!
-
-# Usage
-[Learn how to start your first print here.](https://github.com/FormerLurker/Octolapse/wiki/Usage) It's a good idea to read about the settings before using Octolapse. I also recommend you [watch this brief tutorial](https://youtu.be/sDyg9lMqMG8), which explains how to configure your printer profile for use with the new **High Quality** snapshot profile.
-
-# Known Printer Support
-
-Octolapse is still in Beta but has been confirmed to work on several printers:
-
-* Genuine Prusa - Mk2, Mk2S, Mk2 w Multi Material, Mk3
-* Anet A8 - Beta - User Submitted
-* Anycube I3 Mega - Beta - User Submitted
-* CR-10 - Beta - User Submitted
-* Dagoma Neva - Beta - User Submitted
-* Irapid Black - Beta - User Submitted
-* Monoprice Maker Select v2/Wanhao Duplicator i3 - Beta - User Submitted - Requires OctoPrint 1.3.7rc3 or above
-
-Please note that some settings may need to be adjusted depending on your slicer settings.
+ +
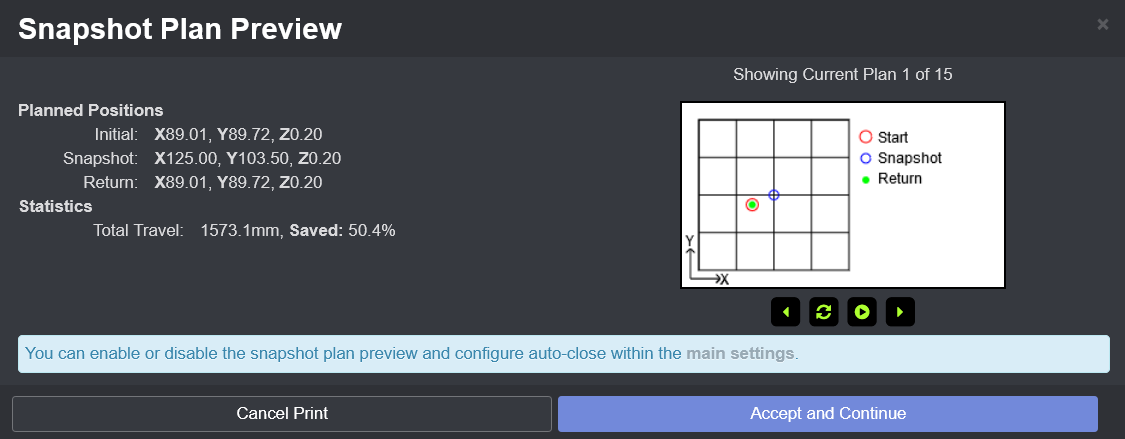
+### Smart Triggers
+
+The new smart triggers read your entire Gcode file before starting a print, giving them a lot more information to make better decisions. They automatically detect print features and prefer to take snapshots over infill, wipe towers, or interior perimeters, and they avoid taking snapshots (where possible) over exterior perimeters. They also try to start snapshots as close to the stabilization point as possible, reducing travel. This all adds up to improvements in quality and a reduction in print time. Plus, you will get to see a preview of your timelapse **before** your print starts. Octolapse will inform you of potential problems *and* will help you to fix them. If you don't like what you see, you can cancel the print and change your settings saving you time and effort.
+
+
+
+
+
+
+### Improved Interface
+
+Thanks to UX advice from [Derek73](https://github.com/derek73), the Octolapse tab has been greatly improved. Highlights include: a larger snapshot preview, shortcuts to the Octolapse settings pages, video and image file browsers, rendering progress, unfinished rendering recovery, new and improved informational panels, and a more intuitive design.
+
+
+
+### Import/Export/Download and Automatically Update Settings
-
+
+### Smart Triggers
+
+The new smart triggers read your entire Gcode file before starting a print, giving them a lot more information to make better decisions. They automatically detect print features and prefer to take snapshots over infill, wipe towers, or interior perimeters, and they avoid taking snapshots (where possible) over exterior perimeters. They also try to start snapshots as close to the stabilization point as possible, reducing travel. This all adds up to improvements in quality and a reduction in print time. Plus, you will get to see a preview of your timelapse **before** your print starts. Octolapse will inform you of potential problems *and* will help you to fix them. If you don't like what you see, you can cancel the print and change your settings saving you time and effort.
+
+
+
+
+
+
+### Improved Interface
+
+Thanks to UX advice from [Derek73](https://github.com/derek73), the Octolapse tab has been greatly improved. Highlights include: a larger snapshot preview, shortcuts to the Octolapse settings pages, video and image file browsers, rendering progress, unfinished rendering recovery, new and improved informational panels, and a more intuitive design.
+
+
+
+### Import/Export/Download and Automatically Update Settings
- +
+
+
+ Smart Trigger Snapshot Plan Preview
-
-
- A user generated compilation created by WildRose Builds. Support this channel and please subscribe!
+ +Octolapse now has its own [profile repository](https://github.com/FormerLurker/Octolapse-Profiles)! Access a library of pre-configured profiles and download, customize, and share your settings with the world! You can export and import individual profiles or all of your Octolapse settings. If newer settings are available from the repository, Octolapse will notify you and can automatically update any of the pre-configured profiles.
+
+
+
+### Enhanced Rendering Capabilities
+
+Now you can see detailed rendering progress and retry or alter renderings that never finished. I've added beta support for the H.265 codec (most Raspberry Pis don't have the memory for this though). I added new rendering overlay tokens, text outlining, and a default font for simplified setup.
+
+
-
+Octolapse now has its own [profile repository](https://github.com/FormerLurker/Octolapse-Profiles)! Access a library of pre-configured profiles and download, customize, and share your settings with the world! You can export and import individual profiles or all of your Octolapse settings. If newer settings are available from the repository, Octolapse will notify you and can automatically update any of the pre-configured profiles.
+
+
+
+### Enhanced Rendering Capabilities
+
+Now you can see detailed rendering progress and retry or alter renderings that never finished. I've added beta support for the H.265 codec (most Raspberry Pis don't have the memory for this though). I added new rendering overlay tokens, text outlining, and a default font for simplified setup.
+
+
- +### Browse Videos and Image Archives
+
+I've finally added native file browsers to Octolapse! Now you can download, sort, or delete timelapses, all without leaving the Octolapse tab. If you enable the new **archive images** feature, you can also download snapshot images or re-render them using different settings. I've even added the ability to upload images into Octolapse!
+
+
+
+### Better Camera Controls
+
+Octolapse already included the ability to control camera settings like focus, exposure, and white balance. In the new version, Octolapse detects your camera's capabilities and renders a control page dynamically. Octolapse even has enhanced custom control pages for some cameras (like the Raspberry Pi cameras and many Logitech models). You can now watch your image change in real time as you adjust the settings. You can even stabilize your extruder to make adjusting the focus a snap! **Requires mjpg-streamer. Not compatible with [*Octoprint Anywhere*](https://plugins.octoprint.org/plugins/anywhere/) or [*The Spaghetti Detective*](https://plugins.octoprint.org/plugins/thespaghettidetective/)**.
+
+
+
+### Integrated Help System
+
+Octolapse now provides documentation for every single setting, and it's all built-in. Get your questions answered quickly by clicking on the help links (blue question marks). Many error popups now also have a help button explaining what the problem is and how to fix it. I've also added [versioneer](https://github.com/warner/python-versioneer), including a link within the Octolapse tab that points directly to the release notes or commit specific to the version you have installed.
+
+
+
+
+
+### Browse Videos and Image Archives
+
+I've finally added native file browsers to Octolapse! Now you can download, sort, or delete timelapses, all without leaving the Octolapse tab. If you enable the new **archive images** feature, you can also download snapshot images or re-render them using different settings. I've even added the ability to upload images into Octolapse!
+
+
+
+### Better Camera Controls
+
+Octolapse already included the ability to control camera settings like focus, exposure, and white balance. In the new version, Octolapse detects your camera's capabilities and renders a control page dynamically. Octolapse even has enhanced custom control pages for some cameras (like the Raspberry Pi cameras and many Logitech models). You can now watch your image change in real time as you adjust the settings. You can even stabilize your extruder to make adjusting the focus a snap! **Requires mjpg-streamer. Not compatible with [*Octoprint Anywhere*](https://plugins.octoprint.org/plugins/anywhere/) or [*The Spaghetti Detective*](https://plugins.octoprint.org/plugins/thespaghettidetective/)**.
+
+
+
+### Integrated Help System
+
+Octolapse now provides documentation for every single setting, and it's all built-in. Get your questions answered quickly by clicking on the help links (blue question marks). Many error popups now also have a help button explaining what the problem is and how to fix it. I've also added [versioneer](https://github.com/warner/python-versioneer), including a link within the Octolapse tab that points directly to the release notes or commit specific to the version you have installed.
+
+
+
+
+
+ Help for Common Print Start Issues
+
+
+
+
+ Automatic Detection of Print Quality Issues, With Help
+
+
+
+### Improved Camera Scripts and Tests
+
+Before and After snapshot Gcode scripts allow you to run custom Gcode before and/or after every snapshot. A new *After Print Ends* script is now available. All bash/bat scripts now have test buttons, making it much easier to test your custom scripts.
+
+
+ Integrated Help Links on the Octolapse Tab
+ 
+ Integrated Help Links Within Each Profile
+
+
+
+### New @OCTOLAPSE Commands
+
+Now you can use Gcode to tell Octolapse when to take snapshots. You can prevent Octolapse from taking snapshots within your start/end Gcode with the new ```@OCTOLAPSE STOP-SNAPSHOTS``` and ```@OCTOLAPSE START-SNAPSHOTS``` commands. You can also use the new ```@OCTOLAPSE TAKE-SNAPSHOT``` command to trigger a snapshot when using one of the GCode triggers.
+
+### Alpha Support for Multi-Material/Multi-Extruder Printers
+
+Octolapse now supports per-extruder/material slicer settings and offsets. It's even compatible with the *Automatic Slicer Settings Detection* feature. This is an *Alpha* feature, so it is probably a bit rough since I don't actually own a multi-extruder printer.
+
+### Better Logging
+
+I've added a custom module based logging system that should help with debugging. You can also clear and download logs right from your *Logging* profile. Exceptions are now logged automatically. This enhancement is really for me, but I thought I'd mention it here.
+
+### More Efficient Parsing and Processing
+
+In order to make the new *Smart* triggers as fast as possible and to reduce the CPU load, I've created a new GCode parser and position processor entirely in C++. This has increased performance by several orders of magnitude, especially when using the new *Smart* triggers.
+
+### Faster Snapshots
-
+ Additional Camera Scripts and Tests
+ +Octolapse now captures snapshots more quickly and performs all image manipulations on a background thread. This reduces print time and improves quality.
+
+### G2/G3 (Arc) Support
+Octolapse now supports Arc commands. Now you can use the [Arc Welder](https://github.com/FormerLurker/ArcWelderPlugin) plugin with Octolapse.
+
+## Support Octolapse Development
+
+Please consider supporting my work by becoming a [patron](https://www.patreon.com/join/FormerLurker), a [Github Sponsor](https://github.com/sponsors/FormerLurker), or by sending me beer money via [PayPal](https://paypal.me/formerlurker). Almost all of the donations go towards offsetting the cost of development, which is substantial. Plus it always makes my day! If you cannot afford to leave a tip or just don't want to, that is fine too! Octolapse is [free and open source](https://raw.githubusercontent.com/FormerLurker/Octolapse/master/LICENSE) after all.
+
+## More Octolapses
+
+
+
+
+
+Octolapse now captures snapshots more quickly and performs all image manipulations on a background thread. This reduces print time and improves quality.
+
+### G2/G3 (Arc) Support
+Octolapse now supports Arc commands. Now you can use the [Arc Welder](https://github.com/FormerLurker/ArcWelderPlugin) plugin with Octolapse.
+
+## Support Octolapse Development
+
+Please consider supporting my work by becoming a [patron](https://www.patreon.com/join/FormerLurker), a [Github Sponsor](https://github.com/sponsors/FormerLurker), or by sending me beer money via [PayPal](https://paypal.me/formerlurker). Almost all of the donations go towards offsetting the cost of development, which is substantial. Plus it always makes my day! If you cannot afford to leave a tip or just don't want to, that is fine too! Octolapse is [free and open source](https://raw.githubusercontent.com/FormerLurker/Octolapse/master/LICENSE) after all.
+
+## More Octolapses
+
+
+
+
+ +
+
+
+ A user-generated compilation created by WildRose Builds. Support this channel, and please subscribe!
-
-
- The obligatory benchy
+
+
+
+
+
+
## History of Octolapse
-I got the idea for Octolapse when I attempted to manually make a [stabilized timelapse](https://youtu.be/xZlP4vpAKNc) by hand editing my GCode files. To accomplish this I used the excellent and simple [GCode System Commands](https://github.com/kantlivelong/OctoPrint-GCodesystemCommands) plugin. The timelapse worked great, but it required a lot of effort which I didn't want to put in every time. I received several requests for instructions on how to create a stabilized timelapse, so I decided to give plugin development a go. I've never done one before (or programmed python or knockout or anything open source), but figured I could contribute something good to the community. This is my "thank you" to all of the makers out there who have contributed your time and effort!
-## Report Problems
-If you think you have found a bug in Octolapse, please create an issue on the official github.com page [here](https://github.com/FormerLurker/Octolapse/issues/new). In order to have your issue handled properly and quickly, please completely
+I got the idea for Octolapse when I attempted to manually make a [stabilized timelapse](https://youtu.be/xZlP4vpAKNc) by hand-editing my GCode files. To accomplish this I used the excellent and simple [GCode System Commands](https://github.com/kantlivelong/OctoPrint-GCodesystemCommands) plugin. The timelapse worked great, but it required a lot of effort which I didn't want to put in every time. I received several requests for instructions on how to create a stabilized timelapse, so I decided to give plugin development a go. At that time I had never written any OctoPrint plugins (or programmed Python or Knockout or anything open source), but figured I could contribute something good to the community.
+
+On Jauary 20, 2018, I released the alpha version of Octolapse, and on March 24, 2018, I released the plugin on the [OctoPrint Plugin Repository](https://plugins.octoprint.org). Octolapse grew up pretty quickly, and on November 15, 2018, I released V0.3.4. Over a year and a half and 640+ commits later, I finally completed V0.4.0, which is a major rewrite of the software and includes all of the features discussed above. It took a long time to get here.
+
+Octolapse is my "thank you" to all of the makers out there who have contributed time and effort to this hobby. I hope that Octolapse can spread information about the 3D printing hobby by attracting a few new users.
+
+## Report Problems and Suggest Improvements
+
+If you think you have found a bug in Octolapse, please [see this guide for reporting issues](https://github.com/FormerLurker/Octolapse/wiki/V0.4---Reporting-An-Issue). Maybe you have an idea for a cool new feature? Find out how to let me know about your idea [here](https://github.com/FormerLurker/Octolapse/wiki/V0.4---Request-A-New-Feature).
+
+# License
-## License
View the [Octolapse license](https://github.com/FormerLurker/Octolapse/blob/master/LICENSE).
-_Copyright (C) 2017 Brad Hochgesang - FormerLurker@pm.me_
+_Copyright (C) 2023 Brad Hochgesang - FormerLurker@pm.me_
diff --git a/builds/build_2025_06_19.zip b/builds/build_2025_06_19.zip
new file mode 100644
index 00000000..56cb745f
Binary files /dev/null and b/builds/build_2025_06_19.zip differ
diff --git a/builds/readme b/builds/readme
new file mode 100644
index 00000000..f997190e
--- /dev/null
+++ b/builds/readme
@@ -0,0 +1 @@
+here we create some builds
diff --git a/octoprint_octolapse/__init__.py b/octoprint_octolapse/__init__.py
index d0522b49..da92c021 100644
--- a/octoprint_octolapse/__init__.py
+++ b/octoprint_octolapse/__init__.py
@@ -1,7 +1,7 @@
# coding=utf-8
##################################################################################
# Octolapse - A plugin for OctoPrint used for making stabilized timelapse videos.
-# Copyright (C) 2017 Brad Hochgesang
+# Copyright (C) 2023 Brad Hochgesang
##################################################################################
# This program is free software: you can redistribute it and/or modify
# it under the terms of the GNU Affero General Public License as published
@@ -23,10 +23,6 @@
from __future__ import absolute_import
from __future__ import unicode_literals
-# uncomment to enable faulthandler. Also need to uncomment faulthandler in plugin_requries in setup.py
-#import faulthandler
-#faulthandler.enable()
-# enable faulthandler for c extension
# Create the root logger. Note that it MUST be created before any imports that use the
# plugin_octolapse.log.LoggingConfigurator, since it is a singleton and we want to be
# the first to create it so that the name is correct.
@@ -36,62 +32,87 @@
# so that we can
logger = logging_configurator.get_logger("__init__")
# be sure to configure the logger after we import all of our modules
-from werkzeug.utils import secure_filename
+import tornado
+import errno
+from octoprint.server import util, app
+from octoprint.server.util.tornado import LargeResponseHandler, RequestlessExceptionLoggingMixin, CorsSupportMixin
import sys
import base64
import json
import os
-import shutil
-import flask
-import math
+# remove unused imports
+#from flask import request, send_file, jsonify, Response, stream_with_context, send_from_directory, current_app, Flask
+from flask import request, jsonify
import threading
import uuid
-import six
+# remove unused imports
+# import six
import time
-from six.moves import queue
+# Remove python 2 support
+# from six.moves import queue
+import queue as queue
from tempfile import mkdtemp
-# import python 3 specific modules
-if (sys.version_info) > (3,0):
- import faulthandler
- faulthandler.enable()
-
from distutils.version import LooseVersion
from io import BytesIO
-
import octoprint.plugin
-import octoprint.server
import octoprint.filemanager
from octoprint.events import Events
-from octoprint.server import admin_permission
from octoprint.server.util.flask import restricted_access
-
-import octoprint_octolapse.stabilization_preprocessing
+# remove unused import
+# import octoprint_octolapse.stabilization_preprocessing
import octoprint_octolapse.camera as camera
import octoprint_octolapse.render as render
import octoprint_octolapse.snapshot as snapshot
import octoprint_octolapse.utility as utility
-from octoprint_octolapse.position import Position
-from octoprint_octolapse.gcode import SnapshotGcodeGenerator
-from octoprint_octolapse.gcode_parser import Commands
-from octoprint_octolapse.render import TimelapseRenderJob, RenderingCallbackArgs
+import octoprint_octolapse.error_messages as error_messages
+from octoprint_octolapse.migration import migrate_files, get_version_from_settings_index
+# remove unused import
+# from octoprint_octolapse.position import Position
+from octoprint_octolapse.stabilization_gcode import SnapshotGcodeGenerator
+from octoprint_octolapse.gcode_commands import Commands
+# remove unused import
+# from octoprint_octolapse.render import TimelapseRenderJob, RenderingCallbackArgs
from octoprint_octolapse.settings import OctolapseSettings, PrinterProfile, StabilizationProfile, TriggerProfile, \
- CameraProfile, RenderingProfile, DebugProfile, SlicerSettings, CuraSettings, OtherSlicerSettings, \
- Simplify3dSettings, Slic3rPeSettings, SettingsJsonEncoder, MjpgStreamer
-from octoprint_octolapse.timelapse import Timelapse, TimelapseState
+ CameraProfile, RenderingProfile, LoggingProfile, SlicerSettings, CuraSettings, OtherSlicerSettings, \
+ Simplify3dSettings, Slic3rPeSettings, SettingsJsonEncoder, MjpgStreamer, MainSettings
+from octoprint_octolapse.timelapse import Timelapse, TimelapseState, TimelapseStartException
from octoprint_octolapse.stabilization_preprocessing import StabilizationPreprocessingThread
from octoprint_octolapse.messenger_worker import MessengerWorker, PluginMessage
from octoprint_octolapse.settings_external import ExternalSettings, ExternalSettingsError
-
-try:
- # noinspection PyCompatibility
- from urlparse import urlparse
-except ImportError:
- # noinspection PyUnresolvedReferences
- from urllib.parse import urlparse
-
+from octoprint_octolapse.render import RenderError, RenderingProcessor, RenderingCallbackArgs, RenderJobInfo
+#import octoprint_octolapse_setuptools as octoprint_octolapse_setuptools
+#import octoprint_octolapse_setuptools.github_release as github_release
+# remove python 2 compatibility
+#try:
+# # noinspection PyCompatibility
+# from urlparse import urlparse as urlparse
+#except ImportError:
+# # noinspection PyUnresolvedReferences
+# from urllib.parse import urlparse as urlparse
+from urllib.parse import urlparse as urlparse
# configure all imported loggers
logging_configurator.configure_loggers()
+
+def configure_debug_mode():
+ # Conditional imports for OctoPrint or Python debug mode
+ # detect debug mode
+ if hasattr(sys, 'gettotalrefcount') or "--debug" in sys.argv:
+ logger.info("Debug mode detected.")
+ # import python 3 specific debug modules
+ logger.info("Python %s detected.", sys.version)
+ if sys.version_info > (3, 0):
+ import faulthandler
+ faulthandler.enable()
+ logger.info("Faulthandler enabled.")
+ else:
+ logger.info("Release mode detected.")
+
+
+# configure debug mode
+configure_debug_mode()
+
+
class OctolapsePlugin(
octoprint.plugin.SettingsPlugin,
octoprint.plugin.AssetPlugin,
@@ -106,11 +127,19 @@ class OctolapsePlugin(
PREPROCESSING_CANCEL_TIMEOUT_SECONDS = 5
PREPROCESSING_NOTIFICATION_PERIOD_SECONDS = 1
+ if LooseVersion(octoprint.server.VERSION) >= LooseVersion("1.4"):
+ import octoprint.access.permissions as permissions
+ admin_permission = permissions.Permissions.ADMIN
+ else:
+ import flask_principal
+ admin_permission = flask_principal.Permission(flask_principal.RoleNeed('admin'))
+
def __init__(self):
+ super(OctolapsePlugin, self).__init__()
self._octolapse_settings = None # type: OctolapseSettings
self._timelapse = None # type: Timelapse
self.gcode_preprocessor = None
- self._preprocessing_progress_queue = None
+ self._stabilization_preprocessor_thread = None
self._preprocessing_cancel_event = threading.Event()
self._plugin_message_queue = queue.Queue()
@@ -121,510 +150,767 @@ def __init__(self):
self.saved_timelapse_settings = None
self.saved_snapshot_plans = None
self.saved_parsed_command = None
+ self.saved_preprocessing_quality_issues = ""
+ self.saved_missed_snapshots = 0
+ self.snapshot_plan_preview_autoclose = False
+ self.snapshot_plan_preview_close_time = 0
+ self.autoclose_snapshot_preview_thread_lock = threading.Lock()
# automatic update thread
self.automatic_update_thread = None
self.automatic_updates_notification_thread = None
self.automatic_update_lock = threading.RLock()
self.automatic_update_cancel = threading.Event()
# contains a list of all profiles with available updates
- self.automatic_updates_available = None
# holds a list of all available profiles on the server for the current version
self.available_profiles = None
+ # rendering processor and task queue
+ self._rendering_task_queue = queue.Queue(maxsize=0)
+ self._rendering_processor = None
def get_sorting_key(self, context=None):
return 1
- def get_current_debug_profile_function(self):
+ def get_current_logging_profile_function(self):
if self._octolapse_settings is not None:
- return self._octolapse_settings.profiles.current_debug_profile
+ return self._octolapse_settings.profiles.current_logging_profile
def get_current_octolapse_settings(self):
# returns a guaranteed up-to-date settings object
return self._octolapse_settings
- # Blueprint Plugin Mixin Requests
- @octoprint.plugin.BlueprintPlugin.route("/downloadTimelapse/
{0}".format(payload.get_rendering_path())
+ msg += "After rendering is completed, the finished video will be available both within the stock timelapse " \
+ "tab, and within the Octolapse tab. "
- message = "{0}{1}{2}".format(job_message, msg, will_sync_message)
- # send a message to the client
- self.send_render_start_message(message)
+ self.send_render_start_message(msg, job)
- def on_render_success(self, payload):
- """Called after all rendering and synchronization attempts are complete."""
+ def on_render_success(self, payload, job):
+ """Called after all rendering is complete."""
assert (isinstance(payload, RenderingCallbackArgs))
- message = "Rendering completed and was successful."
if payload.BeforeRenderError or payload.AfterRenderError:
- pre_post_render_message = "Rendering completed and was successful, but there were some script errors: "
+ pre_post_render_message = "Rendering completed and was successful for the '{0}' camera, but there were " \
+ "some script errors: ".format(payload.CameraName)
if payload.BeforeRenderError:
- pre_post_render_message += " The before script failed with the following error:" \
- " {0}".format(payload.BeforeRenderError)
+ pre_post_render_message += "{0}Before Render Script - {1}".format(os.linesep, payload.BeforeRenderError.message)
if payload.AfterRenderError:
- pre_post_render_message += " The after script failed with the following error:" \
- " {0}".format(payload.AfterRenderError)
+ pre_post_render_message += "{0}After Render Script - {1}".format(os.linesep, payload.AfterRenderError.message)
self.send_post_render_failed_message(pre_post_render_message)
- if payload.Synchronize:
- # If we are synchronizing with the Octoprint timelapse plugin, we will send a tailored message
- message = "Octolapse has completed rendering a timelapse for camera '{0}'. Your video is now available " \
- "within the default timelapse plugin tab as '{1}'. Octolapse ".format(
- payload.CameraName,
- payload.get_synchronization_filename()
- )
-
- else:
+ if payload.RenderingEnabled:
# This timelapse won't be moved into the octoprint timelapse plugin folder.
- message = "Octolapse has completed rendering a timelapse for camera '{0}'. Due to your rendering " \
- "settings, the timelapse was not synchronized with the OctoPrint plugin. You should be able" \
- " to find your video within your octoprint server here:
'{1}'".format(
- payload.CameraName,
- payload.get_rendering_path()
- )
-
- self.send_render_success_message(message, payload.Synchronize)
+ message = "Octolapse has completed rendering a timelapse for camera '{0}'. Your video can be found by " \
+ "clicking 'Videos and Images' within the Octolapse tab.".format(payload.CameraName)
+ if payload.ArchivePath and os.path.isfile(payload.ArchivePath):
+ message += " An archive of your snapshots can be found within the 'Saved Snapshots' tab of the " \
+ "'Videos and Images' dialog."
+ else:
+ message = (
+ "Octolapse has completed creating an archive of your snapshots for camera '{0}'. Your archive "
+ "is available within the 'Saved Snapshots' tab of the 'Videos and Images' dialog."
+ .format(payload.CameraName)
+ )
+ self.send_render_success_message(message, job)
+
+ output_file_name = "{0}.{1}".format(payload.RenderingFilename, payload.RenderingExtension)
+ gcode_filename = "{0}.{1}".format(payload.GcodeFilename, payload.GcodeFileExtension)
+ # Todo: Make sure this path is correct
+ output_file_path = payload.get_rendering_path()
+
+ # Notify the plugin that a timelapse has been added, if it exists
+ if os.path.isfile(output_file_path):
+ file_info = utility.get_file_info(output_file_path)
+ file_info["type"] = utility.FILE_TYPE_TIMELAPSE_OCTOLAPSE
+ self.send_files_changed_message(
+ file_info,
+ 'added',
+ None
+ )
+ # Notify anyone who cares that Octolapse has finished rendering a movie
+ self.send_movie_done_event(gcode_filename, output_file_path, output_file_name)
+
+ archive_path = payload.ArchivePath
+ # we need to make sure the archive path exists again, since some plugin might have deleted it.
+ if archive_path and os.path.isfile(archive_path):
+ # Notify the plugin that an archive was created
+ file_info = utility.get_file_info(archive_path)
+ file_info["type"] = utility.FILE_TYPE_SNAPSHOT_ARCHIVE
+ self.send_files_changed_message(
+ file_info,
+ 'added',
+ None
+ )
+ # Notify anyone who cares that Octolapse has finished creating a snapshot archive
+ self.send_snapshot_archive_done_event(gcode_filename, archive_path, os.path.basename(archive_path))
+
+ def on_render_progress(self, payload, job):
+ self.send_render_progress_message(payload, job)
+
+ def send_movie_done_event(self, gcode_filename, movie_path, movie_basename):
+ event = Events.PLUGIN_OCTOLAPSE_MOVIE_DONE
+ custom_payload = dict(
+ gcode=gcode_filename,
+ movie=movie_path,
+ movie_basename=movie_basename
+ )
+ self._event_bus.fire(event, payload=custom_payload)
+
+ def send_snapshot_archive_done_event(self, gcode_filename, archive_path, archive_basename):
+ event = Events.PLUGIN_OCTOLAPSE_SNAPSHOT_ARCHIVE_DONE
+ custom_payload = dict(
+ gcode=gcode_filename,
+ archive=archive_path,
+ archive_basename=archive_basename
+ )
+ self._event_bus.fire(event, payload=custom_payload)
- def on_render_error(self, payload, error):
- """Called after all rendering and synchronization attempts are complete."""
+ def on_render_error(self, payload, error, job):
+ """Called after all rendering is complete."""
if payload:
assert (isinstance(payload, RenderingCallbackArgs))
if payload.BeforeRenderError or payload.AfterRenderError:
@@ -2561,14 +3649,13 @@ def on_render_error(self, payload, error):
if payload.AfterRenderError:
pre_post_render_message += " The after script failed with the following error:" \
" {0}".format(payload.AfterRenderError)
- self.send_render_failed_message(pre_post_render_message)
-
- if error != None:
+ self.send_render_failed_message(pre_post_render_message, job)
+ if error is not None:
message = "Rendering failed for camera '{0}'. {1}".format(payload.CameraName, error)
- self.send_render_failed_message(message)
+ self.send_render_failed_message(message, job)
else:
message = "Rendering failed. {0}".format(error)
- self.send_render_failed_message(message)
+ self.send_render_failed_message(message, job)
def on_render_end(self):
self.send_render_end_message()
@@ -2599,96 +3686,141 @@ def get_assets(self):
"js/octolapse.profiles.camera.js",
"js/octolapse.profiles.camera.webcam.js",
"js/octolapse.profiles.camera.webcam.mjpg_streamer.js",
- "js/octolapse.profiles.debug.js",
+ "js/octolapse.profiles.logging.js",
"js/octolapse.status.js",
"js/octolapse.status.snapshotplan.js",
"js/octolapse.status.snapshotplan_preview.js",
"js/octolapse.help.js",
"js/octolapse.profiles.library.js",
- "js/webcams/mjpg_streamer/raspi_cam_v2.js"
+ "js/webcams/mjpg_streamer/raspi_cam_v2.js",
+ "js/octolapse.dialog.js",
+ "js/octolapse.dialog.renderings.unfinished.js",
+ "js/octolapse.dialog.renderings.in_process.js",
+ "js/octolapse.file_browser.js",
+ "js/octolapse.helpers.js",
+ "js/octolapse.dialog.timelapse_files.js"
],
css=["css/jquery.minicolors.css", "css/octolapse.css"],
less=["less/octolapse.less"]
)
- # ~~ software update hook
- def get_update_information(self):
- # get the checkout type from the software updater
- prerelease_channel = None
- is_prerelease = False
- # get this for reference. Eventually I'll have to use it!
- # is the software update set to prerelease?
-
- if self._settings.global_get(["plugins", "softwareupdate", "checks", "octoprint", "prerelease"]):
- # If it's a prerelease, look at the channel and configure the proper branch for Octolapse
- prerelease_channel = self._settings.global_get(
- ["plugins", "softwareupdate", "checks", "octoprint", "prerelease_channel"]
+ octolapse_update_info = dict(
+ displayName="Octolapse",
+ # version check: github repository
+ type="github_release",
+ user="FormerLurker",
+ repo="Octolapse",
+ pip="https://github.com/FormerLurker/Octolapse/archive/{target_version}.zip",
+ stable_branch=dict(branch="master", commitish=["master"], name="Stable"),
+ release_compare='custom',
+ prerelease_branches=[
+ dict(
+ branch="rc/maintenance",
+ commitish=["master", "rc/maintenance"], # maintenance RCs
+ name="Maintenance RCs"
+ ),
+ dict(
+ branch="rc/devel",
+ commitish=["master", "rc/maintenance", "rc/devel"], # devel & maintenance RCs
+ name="Devel RCs"
)
- if prerelease_channel == "rc/maintenance":
- is_prerelease = True
- prerelease_channel = "rc/maintenance"
- elif prerelease_channel == "rc/devel":
- is_prerelease = True
- prerelease_channel = "rc/devel"
-
- octolapse_info = dict(
- displayName="Octolapse",
- displayVersion=self._plugin_version,
- # version check: github repository
- type="github_release",
- user="FormerLurker",
- repo="Octolapse",
- current=self._plugin_version,
- prerelease=is_prerelease,
- pip="https://github.com/FormerLurker/Octolapse/archive/{target_version}.zip",
- stable_branch=dict(branch="master", commitish=["master"], name="Stable"),
- release_compare='semantic_version',
- prerelease_branches=[
- dict(
- branch="rc/maintenance",
- commitish=["rc/maintenance"], # maintenance RCs
- name="Maintenance RCs"
- ),
- dict(
- branch="rc/devel",
- commitish=["rc/maintenance", "rc/devel"], # devel & maintenance RCs
- name="Devel RCs"
+ ],
+ )
+
+ def get_release_info(self):
+ # Starting with V1.5.0 prerelease branches are supported!
+ if LooseVersion(octoprint.server.VERSION) < LooseVersion("1.5.0"):
+ # get the checkout type from the software updater
+ prerelease_channel = None
+ is_prerelease = False
+ # get this for reference. Eventually I'll have to use it!
+ # is the software update set to prerelease?
+ if self._settings.global_get(["plugins", "softwareupdate", "checks", "octoprint", "prerelease"]):
+ # If it's a prerelease, look at the channel and configure the proper branch for Arc Welder
+ prerelease_channel = self._settings.global_get(
+ ["plugins", "softwareupdate", "checks", "octoprint", "prerelease_channel"]
)
- ],
- )
-
- if prerelease_channel is not None:
- octolapse_info["prerelease_channel"] = prerelease_channel
- # return the update config
+ if prerelease_channel == "rc/maintenance":
+ is_prerelease = True
+ prerelease_channel = "rc/maintenance"
+ elif prerelease_channel == "rc/devel":
+ is_prerelease = True
+ prerelease_channel = "rc/devel"
+ OctolapsePlugin.octolapse_update_info["prerelease"] = is_prerelease
+ if prerelease_channel is not None:
+ OctolapsePlugin.octolapse_update_info["prerelease_channel"] = prerelease_channel
+
+ OctolapsePlugin.octolapse_update_info["displayVersion"] = self._plugin_version
+ OctolapsePlugin.octolapse_update_info["current"] = self._plugin_version
return dict(
- octolapse=octolapse_info
+ octolapse=OctolapsePlugin.octolapse_update_info
)
+ # ~~ software update hook
+ def get_update_information(self):
+ return self.get_release_info()
+
# noinspection PyUnusedLocal
def get_timelapse_extensions(self, *args, **kwargs):
allowed_extensions = ["mpg", "mpeg", "mp4", "m4v", "mkv", "gif", "avi", "flv", "vob"]
-
if sys.version_info < (3,0):
return [i.encode('ascii', 'replace') for i in allowed_extensions]
return allowed_extensions
-
def bodysize_hook(self, current_max_body_sizes, *args, **kwargs):
- max_upload_size_mb = 5 # 5mb bytes
- return [("POST", "/importSettings", 1024*1024*max_upload_size_mb)]
-
-# If you want your plugin to be registered within OctoPrin#t under a different
-# name than what you defined in setup.py
-# ("OctoPrint-PluginSkeleton"), you may define that here. Same goes for the
-# other metadata derived from setup.py that
-# can be overwritten via __plugin_xyz__ control properties. See the
-# documentation for that.
+ max_settings_upload_mb = 5
+ # TODO - Add max_snapshot_upload_mb setting to config.yaml
+ max_snapshot_upload_mb = 1024 # 1GB
+ return [
+ ("POST", "/importSettings", 1024*1024*max_settings_upload_mb),
+ ("POST", "/importSnapshots", 1024*1024*max_snapshot_upload_mb)
+
+ ]
+
+ def register_custom_events(*args, **kwargs):
+ return ["movie_done", "snapshot_archive_done"]
+
+ def register_custom_routes(self, server_routes, *args, **kwargs):
+ # version specific permission validator
+ if LooseVersion(octoprint.server.VERSION) >= LooseVersion("1.4"):
+ admin_validation_chain = [
+ util.tornado.access_validation_factory(app, util.flask.admin_validator),
+ ]
+ else:
+ # the concept of granular permissions does not exist in this version of Octoprint. Fallback to the
+ # admin role
+ def admin_permission_validator(flask_request):
+ user = util.flask.get_flask_user_from_request(flask_request)
+ if user is None or not user.is_authenticated() or not user.is_admin():
+ raise tornado.web.HTTPError(403)
+ permission_validator = admin_permission_validator
+ admin_validation_chain = [util.tornado.access_validation_factory(app, permission_validator), ]
+
+
+ return [
+ (
+ r"/downloadFile",
+ OctolapseLargeResponseHandler,
+ dict(
+ request_callback=self.download_file_request,
+ as_attachment=True,
+ access_validation=util.tornado.validation_chain(*admin_validation_chain)
+ )
+ ),
+ (
+ r"/getSnapshot",
+ OctolapseLargeResponseHandler,
+ dict(
+ request_callback=self.get_snapshot_request,
+ as_attachment=False
+ )
+ )
+ ]
__plugin_name__ = "Octolapse"
-__plugin_pythoncompat__ = ">=2.7,<4"
-
+__plugin_pythoncompat__ = ">=3.7,<4"
def __plugin_load__():
global __plugin_implementation__
@@ -2701,5 +3833,62 @@ def __plugin_load__():
"octoprint.comm.protocol.gcode.sending": (__plugin_implementation__.on_gcode_sending, -1),
"octoprint.comm.protocol.gcode.received": (__plugin_implementation__.on_gcode_received, -1),
"octoprint.timelapse.extensions": __plugin_implementation__.get_timelapse_extensions,
- "octoprint.server.http.bodysize": __plugin_implementation__.bodysize_hook
+ "octoprint.server.http.bodysize": __plugin_implementation__.bodysize_hook,
+ "octoprint.events.register_custom_events": __plugin_implementation__.register_custom_events,
+ "octoprint.server.http.routes": __plugin_implementation__.register_custom_routes
}
+
+
+class OctolapseLargeResponseHandler(LargeResponseHandler):
+ def initialize(
+ self, request_callback, as_attachment=False, access_validation=None, default_filename=None,
+ on_before_request=None, on_after_request=None
+ ):
+ super().initialize(
+ '', default_filename=default_filename, as_attachment=as_attachment, allow_client_caching=False,
+ access_validation=access_validation, path_validation=None, etag_generator=None,
+ name_generator=self.name_generator, mime_type_guesser=None)
+ self.download_file_name = None
+ self._before_request_callback = on_before_request
+ self._request_callback = request_callback
+ self._after_request_callback = on_after_request
+ self.after_request_internal = None
+ self.after_request_internal_args = None
+
+ def name_generator(self, path):
+ if self.download_file_name is not None:
+ return self.download_file_name
+
+ def prepare(self):
+ if self._before_request_callback:
+ self._before_request_callback()
+
+ def get(self, include_body=True):
+ if self._access_validation is not None:
+ self._access_validation(self.request)
+
+ if "cookie" in self.request.arguments:
+ self.set_cookie(self.request.arguments["cookie"][0], "true", path="/")
+ full_path = self._request_callback(self)
+ self.root = utility.get_directory_from_full_path(full_path)
+
+ # if the file does not exist, return a 404
+ if not os.path.isfile(full_path):
+ raise tornado.web.HTTPError(404)
+
+ # return the file
+ return tornado.web.StaticFileHandler.get(self, full_path, include_body=include_body)
+
+ def on_finish(self):
+ if self.after_request_internal:
+ self.after_request_internal(**self.after_request_internal_args)
+
+ if self._after_request_callback:
+ self._after_request_callback()
+
+
+
+from ._version import get_versions
+__version__ = get_versions()['version']
+__git_version__ = get_versions()['full-revisionid']
+del get_versions
diff --git a/octoprint_octolapse/_version.py b/octoprint_octolapse/_version.py
new file mode 100644
index 00000000..aec13b46
--- /dev/null
+++ b/octoprint_octolapse/_version.py
@@ -0,0 +1,520 @@
+
+# This file helps to compute a version number in source trees obtained from
+# git-archive tarball (such as those provided by githubs download-from-tag
+# feature). Distribution tarballs (built by setup.py sdist) and build
+# directories (produced by setup.py build) will contain a much shorter file
+# that just contains the computed version number.
+
+# This file is released into the public domain. Generated by
+# versioneer-0.18 (https://github.com/warner/python-versioneer)
+
+"""Git implementation of _version.py."""
+
+import errno
+import os
+import re
+import subprocess
+import sys
+
+
+def get_keywords():
+ """Get the keywords needed to look up the version information."""
+ # these strings will be replaced by git during git-archive.
+ # setup.py/versioneer.py will grep for the variable names, so they must
+ # each be defined on a line of their own. _version.py will just call
+ # get_keywords().
+ git_refnames = "$Format:%d$"
+ git_full = "$Format:%H$"
+ git_date = "$Format:%ci$"
+ keywords = {"refnames": git_refnames, "full": git_full, "date": git_date}
+ return keywords
+
+
+class VersioneerConfig:
+ """Container for Versioneer configuration parameters."""
+
+
+def get_config():
+ """Create, populate and return the VersioneerConfig() object."""
+ # these strings are filled in when 'setup.py versioneer' creates
+ # _version.py
+ cfg = VersioneerConfig()
+ cfg.VCS = "git"
+ cfg.style = "pep440"
+ cfg.tag_prefix = ""
+ cfg.parentdir_prefix = ""
+ cfg.versionfile_source = "octoprint_octolapse/_version.py"
+ cfg.verbose = False
+ return cfg
+
+
+class NotThisMethod(Exception):
+ """Exception raised if a method is not valid for the current scenario."""
+
+
+LONG_VERSION_PY = {}
+HANDLERS = {}
+
+
+def register_vcs_handler(vcs, method): # decorator
+ """Decorator to mark a method as the handler for a particular VCS."""
+ def decorate(f):
+ """Store f in HANDLERS[vcs][method]."""
+ if vcs not in HANDLERS:
+ HANDLERS[vcs] = {}
+ HANDLERS[vcs][method] = f
+ return f
+ return decorate
+
+
+def run_command(commands, args, cwd=None, verbose=False, hide_stderr=False,
+ env=None):
+ """Call the given command(s)."""
+ assert isinstance(commands, list)
+ p = None
+ for c in commands:
+ try:
+ dispcmd = str([c] + args)
+ # remember shell=False, so use git.cmd on windows, not just git
+ p = subprocess.Popen([c] + args, cwd=cwd, env=env,
+ stdout=subprocess.PIPE,
+ stderr=(subprocess.PIPE if hide_stderr
+ else None))
+ break
+ except EnvironmentError:
+ e = sys.exc_info()[1]
+ if e.errno == errno.ENOENT:
+ continue
+ if verbose:
+ print("unable to run %s" % dispcmd)
+ print(e)
+ return None, None
+ else:
+ if verbose:
+ print("unable to find command, tried %s" % (commands,))
+ return None, None
+ stdout = p.communicate()[0].strip()
+ if sys.version_info[0] >= 3:
+ stdout = stdout.decode()
+ if p.returncode != 0:
+ if verbose:
+ print("unable to run %s (error)" % dispcmd)
+ print("stdout was %s" % stdout)
+ return None, p.returncode
+ return stdout, p.returncode
+
+
+def versions_from_parentdir(parentdir_prefix, root, verbose):
+ """Try to determine the version from the parent directory name.
+
+ Source tarballs conventionally unpack into a directory that includes both
+ the project name and a version string. We will also support searching up
+ two directory levels for an appropriately named parent directory
+ """
+ rootdirs = []
+
+ for i in range(3):
+ dirname = os.path.basename(root)
+ if dirname.startswith(parentdir_prefix):
+ return {"version": dirname[len(parentdir_prefix):],
+ "full-revisionid": None,
+ "dirty": False, "error": None, "date": None}
+ else:
+ rootdirs.append(root)
+ root = os.path.dirname(root) # up a level
+
+ if verbose:
+ print("Tried directories %s but none started with prefix %s" %
+ (str(rootdirs), parentdir_prefix))
+ raise NotThisMethod("rootdir doesn't start with parentdir_prefix")
+
+
+@register_vcs_handler("git", "get_keywords")
+def git_get_keywords(versionfile_abs):
+ """Extract version information from the given file."""
+ # the code embedded in _version.py can just fetch the value of these
+ # keywords. When used from setup.py, we don't want to import _version.py,
+ # so we do it with a regexp instead. This function is not used from
+ # _version.py.
+ keywords = {}
+ try:
+ f = open(versionfile_abs, "r")
+ for line in f.readlines():
+ if line.strip().startswith("git_refnames ="):
+ mo = re.search(r'=\s*"(.*)"', line)
+ if mo:
+ keywords["refnames"] = mo.group(1)
+ if line.strip().startswith("git_full ="):
+ mo = re.search(r'=\s*"(.*)"', line)
+ if mo:
+ keywords["full"] = mo.group(1)
+ if line.strip().startswith("git_date ="):
+ mo = re.search(r'=\s*"(.*)"', line)
+ if mo:
+ keywords["date"] = mo.group(1)
+ f.close()
+ except EnvironmentError:
+ pass
+ return keywords
+
+
+@register_vcs_handler("git", "keywords")
+def git_versions_from_keywords(keywords, tag_prefix, verbose):
+ """Get version information from git keywords."""
+ if not keywords:
+ raise NotThisMethod("no keywords at all, weird")
+ date = keywords.get("date")
+ if date is not None:
+ # git-2.2.0 added "%cI", which expands to an ISO-8601 -compliant
+ # datestamp. However we prefer "%ci" (which expands to an "ISO-8601
+ # -like" string, which we must then edit to make compliant), because
+ # it's been around since git-1.5.3, and it's too difficult to
+ # discover which version we're using, or to work around using an
+ # older one.
+ date = date.strip().replace(" ", "T", 1).replace(" ", "", 1)
+ refnames = keywords["refnames"].strip()
+ if refnames.startswith("$Format"):
+ if verbose:
+ print("keywords are unexpanded, not using")
+ raise NotThisMethod("unexpanded keywords, not a git-archive tarball")
+ refs = set([r.strip() for r in refnames.strip("()").split(",")])
+ # starting in git-1.8.3, tags are listed as "tag: foo-1.0" instead of
+ # just "foo-1.0". If we see a "tag: " prefix, prefer those.
+ TAG = "tag: "
+ tags = set([r[len(TAG):] for r in refs if r.startswith(TAG)])
+ if not tags:
+ # Either we're using git < 1.8.3, or there really are no tags. We use
+ # a heuristic: assume all version tags have a digit. The old git %d
+ # expansion behaves like git log --decorate=short and strips out the
+ # refs/heads/ and refs/tags/ prefixes that would let us distinguish
+ # between branches and tags. By ignoring refnames without digits, we
+ # filter out many common branch names like "release" and
+ # "stabilization", as well as "HEAD" and "master".
+ tags = set([r for r in refs if re.search(r'\d', r)])
+ if verbose:
+ print("discarding '%s', no digits" % ",".join(refs - tags))
+ if verbose:
+ print("likely tags: %s" % ",".join(sorted(tags)))
+ for ref in sorted(tags):
+ # sorting will prefer e.g. "2.0" over "2.0rc1"
+ if ref.startswith(tag_prefix):
+ r = ref[len(tag_prefix):]
+ if verbose:
+ print("picking %s" % r)
+ return {"version": r,
+ "full-revisionid": keywords["full"].strip(),
+ "dirty": False, "error": None,
+ "date": date}
+ # no suitable tags, so version is "0+unknown", but full hex is still there
+ if verbose:
+ print("no suitable tags, using unknown + full revision id")
+ return {"version": "0+unknown",
+ "full-revisionid": keywords["full"].strip(),
+ "dirty": False, "error": "no suitable tags", "date": None}
+
+
+@register_vcs_handler("git", "pieces_from_vcs")
+def git_pieces_from_vcs(tag_prefix, root, verbose, run_command=run_command):
+ """Get version from 'git describe' in the root of the source tree.
+
+ This only gets called if the git-archive 'subst' keywords were *not*
+ expanded, and _version.py hasn't already been rewritten with a short
+ version string, meaning we're inside a checked out source tree.
+ """
+ GITS = ["git"]
+ if sys.platform == "win32":
+ GITS = ["git.cmd", "git.exe"]
+
+ out, rc = run_command(GITS, ["rev-parse", "--git-dir"], cwd=root,
+ hide_stderr=True)
+ if rc != 0:
+ if verbose:
+ print("Directory %s not under git control" % root)
+ raise NotThisMethod("'git rev-parse --git-dir' returned error")
+
+ # if there is a tag matching tag_prefix, this yields TAG-NUM-gHEX[-dirty]
+ # if there isn't one, this yields HEX[-dirty] (no NUM)
+ describe_out, rc = run_command(GITS, ["describe", "--tags", "--dirty",
+ "--always", "--long",
+ "--match", "%s*" % tag_prefix],
+ cwd=root)
+ # --long was added in git-1.5.5
+ if describe_out is None:
+ raise NotThisMethod("'git describe' failed")
+ describe_out = describe_out.strip()
+ full_out, rc = run_command(GITS, ["rev-parse", "HEAD"], cwd=root)
+ if full_out is None:
+ raise NotThisMethod("'git rev-parse' failed")
+ full_out = full_out.strip()
+
+ pieces = {}
+ pieces["long"] = full_out
+ pieces["short"] = full_out[:7] # maybe improved later
+ pieces["error"] = None
+
+ # parse describe_out. It will be like TAG-NUM-gHEX[-dirty] or HEX[-dirty]
+ # TAG might have hyphens.
+ git_describe = describe_out
+
+ # look for -dirty suffix
+ dirty = git_describe.endswith("-dirty")
+ pieces["dirty"] = dirty
+ if dirty:
+ git_describe = git_describe[:git_describe.rindex("-dirty")]
+
+ # now we have TAG-NUM-gHEX or HEX
+
+ if "-" in git_describe:
+ # TAG-NUM-gHEX
+ mo = re.search(r'^(.+)-(\d+)-g([0-9a-f]+)$', git_describe)
+ if not mo:
+ # unparseable. Maybe git-describe is misbehaving?
+ pieces["error"] = ("unable to parse git-describe output: '%s'"
+ % describe_out)
+ return pieces
+
+ # tag
+ full_tag = mo.group(1)
+ if not full_tag.startswith(tag_prefix):
+ if verbose:
+ fmt = "tag '%s' doesn't start with prefix '%s'"
+ print(fmt % (full_tag, tag_prefix))
+ pieces["error"] = ("tag '%s' doesn't start with prefix '%s'"
+ % (full_tag, tag_prefix))
+ return pieces
+ pieces["closest-tag"] = full_tag[len(tag_prefix):]
+
+ # distance: number of commits since tag
+ pieces["distance"] = int(mo.group(2))
+
+ # commit: short hex revision ID
+ pieces["short"] = mo.group(3)
+
+ else:
+ # HEX: no tags
+ pieces["closest-tag"] = None
+ count_out, rc = run_command(GITS, ["rev-list", "HEAD", "--count"],
+ cwd=root)
+ pieces["distance"] = int(count_out) # total number of commits
+
+ # commit date: see ISO-8601 comment in git_versions_from_keywords()
+ date = run_command(GITS, ["show", "-s", "--format=%ci", "HEAD"],
+ cwd=root)[0].strip()
+ pieces["date"] = date.strip().replace(" ", "T", 1).replace(" ", "", 1)
+
+ return pieces
+
+
+def plus_or_dot(pieces):
+ """Return a + if we don't already have one, else return a ."""
+ if "+" in pieces.get("closest-tag", ""):
+ return "."
+ return "+"
+
+
+def render_pep440(pieces):
+ """Build up version string, with post-release "local version identifier".
+
+ Our goal: TAG[+DISTANCE.gHEX[.dirty]] . Note that if you
+ get a tagged build and then dirty it, you'll get TAG+0.gHEX.dirty
+
+ Exceptions:
+ 1: no tags. git_describe was just HEX. 0+untagged.DISTANCE.gHEX[.dirty]
+ """
+ if pieces["closest-tag"]:
+ rendered = pieces["closest-tag"]
+ if pieces["distance"] or pieces["dirty"]:
+ rendered += plus_or_dot(pieces)
+ rendered += "%d.g%s" % (pieces["distance"], pieces["short"])
+ if pieces["dirty"]:
+ rendered += ".dirty"
+ else:
+ # exception #1
+ rendered = "0+untagged.%d.g%s" % (pieces["distance"],
+ pieces["short"])
+ if pieces["dirty"]:
+ rendered += ".dirty"
+ return rendered
+
+
+def render_pep440_pre(pieces):
+ """TAG[.post.devDISTANCE] -- No -dirty.
+
+ Exceptions:
+ 1: no tags. 0.post.devDISTANCE
+ """
+ if pieces["closest-tag"]:
+ rendered = pieces["closest-tag"]
+ if pieces["distance"]:
+ rendered += ".post.dev%d" % pieces["distance"]
+ else:
+ # exception #1
+ rendered = "0.post.dev%d" % pieces["distance"]
+ return rendered
+
+
+def render_pep440_post(pieces):
+ """TAG[.postDISTANCE[.dev0]+gHEX] .
+
+ The ".dev0" means dirty. Note that .dev0 sorts backwards
+ (a dirty tree will appear "older" than the corresponding clean one),
+ but you shouldn't be releasing software with -dirty anyways.
+
+ Exceptions:
+ 1: no tags. 0.postDISTANCE[.dev0]
+ """
+ if pieces["closest-tag"]:
+ rendered = pieces["closest-tag"]
+ if pieces["distance"] or pieces["dirty"]:
+ rendered += ".post%d" % pieces["distance"]
+ if pieces["dirty"]:
+ rendered += ".dev0"
+ rendered += plus_or_dot(pieces)
+ rendered += "g%s" % pieces["short"]
+ else:
+ # exception #1
+ rendered = "0.post%d" % pieces["distance"]
+ if pieces["dirty"]:
+ rendered += ".dev0"
+ rendered += "+g%s" % pieces["short"]
+ return rendered
+
+
+def render_pep440_old(pieces):
+ """TAG[.postDISTANCE[.dev0]] .
+
+ The ".dev0" means dirty.
+
+ Eexceptions:
+ 1: no tags. 0.postDISTANCE[.dev0]
+ """
+ if pieces["closest-tag"]:
+ rendered = pieces["closest-tag"]
+ if pieces["distance"] or pieces["dirty"]:
+ rendered += ".post%d" % pieces["distance"]
+ if pieces["dirty"]:
+ rendered += ".dev0"
+ else:
+ # exception #1
+ rendered = "0.post%d" % pieces["distance"]
+ if pieces["dirty"]:
+ rendered += ".dev0"
+ return rendered
+
+
+def render_git_describe(pieces):
+ """TAG[-DISTANCE-gHEX][-dirty].
+
+ Like 'git describe --tags --dirty --always'.
+
+ Exceptions:
+ 1: no tags. HEX[-dirty] (note: no 'g' prefix)
+ """
+ if pieces["closest-tag"]:
+ rendered = pieces["closest-tag"]
+ if pieces["distance"]:
+ rendered += "-%d-g%s" % (pieces["distance"], pieces["short"])
+ else:
+ # exception #1
+ rendered = pieces["short"]
+ if pieces["dirty"]:
+ rendered += "-dirty"
+ return rendered
+
+
+def render_git_describe_long(pieces):
+ """TAG-DISTANCE-gHEX[-dirty].
+
+ Like 'git describe --tags --dirty --always -long'.
+ The distance/hash is unconditional.
+
+ Exceptions:
+ 1: no tags. HEX[-dirty] (note: no 'g' prefix)
+ """
+ if pieces["closest-tag"]:
+ rendered = pieces["closest-tag"]
+ rendered += "-%d-g%s" % (pieces["distance"], pieces["short"])
+ else:
+ # exception #1
+ rendered = pieces["short"]
+ if pieces["dirty"]:
+ rendered += "-dirty"
+ return rendered
+
+
+def render(pieces, style):
+ """Render the given version pieces into the requested style."""
+ if pieces["error"]:
+ return {"version": "unknown",
+ "full-revisionid": pieces.get("long"),
+ "dirty": None,
+ "error": pieces["error"],
+ "date": None}
+
+ if not style or style == "default":
+ style = "pep440" # the default
+
+ if style == "pep440":
+ rendered = render_pep440(pieces)
+ elif style == "pep440-pre":
+ rendered = render_pep440_pre(pieces)
+ elif style == "pep440-post":
+ rendered = render_pep440_post(pieces)
+ elif style == "pep440-old":
+ rendered = render_pep440_old(pieces)
+ elif style == "git-describe":
+ rendered = render_git_describe(pieces)
+ elif style == "git-describe-long":
+ rendered = render_git_describe_long(pieces)
+ else:
+ raise ValueError("unknown style '%s'" % style)
+
+ return {"version": rendered, "full-revisionid": pieces["long"],
+ "dirty": pieces["dirty"], "error": None,
+ "date": pieces.get("date")}
+
+
+def get_versions():
+ """Get version information or return default if unable to do so."""
+ # I am in _version.py, which lives at ROOT/VERSIONFILE_SOURCE. If we have
+ # __file__, we can work backwards from there to the root. Some
+ # py2exe/bbfreeze/non-CPython implementations don't do __file__, in which
+ # case we can only use expanded keywords.
+
+ cfg = get_config()
+ verbose = cfg.verbose
+
+ try:
+ return git_versions_from_keywords(get_keywords(), cfg.tag_prefix,
+ verbose)
+ except NotThisMethod:
+ pass
+
+ try:
+ root = os.path.realpath(__file__)
+ # versionfile_source is the relative path from the top of the source
+ # tree (where the .git directory might live) to this file. Invert
+ # this to find the root from __file__.
+ for i in cfg.versionfile_source.split('/'):
+ root = os.path.dirname(root)
+ except NameError:
+ return {"version": "0+unknown", "full-revisionid": None,
+ "dirty": None,
+ "error": "unable to find root of source tree",
+ "date": None}
+
+ try:
+ pieces = git_pieces_from_vcs(cfg.tag_prefix, root, verbose)
+ return render(pieces, cfg.style)
+ except NotThisMethod:
+ pass
+
+ try:
+ if cfg.parentdir_prefix:
+ return versions_from_parentdir(cfg.parentdir_prefix, root, verbose)
+ except NotThisMethod:
+ pass
+
+ return {"version": "0+unknown", "full-revisionid": None,
+ "dirty": None,
+ "error": "unable to compute version", "date": None}
diff --git a/octoprint_octolapse/camera.py b/octoprint_octolapse/camera.py
index bebf3730..811cb195 100644
--- a/octoprint_octolapse/camera.py
+++ b/octoprint_octolapse/camera.py
@@ -1,7 +1,7 @@
# coding=utf-8
##################################################################################
# Octolapse - A plugin for OctoPrint used for making stabilized timelapse videos.
-# Copyright (C) 2019 Brad Hochgesang
+# Copyright (C) 2023 Brad Hochgesang
##################################################################################
# This program is free software: you can redistribute it and/or modify
# it under the terms of the GNU Affero General Public License as published
@@ -22,18 +22,25 @@
##################################################################################
from __future__ import unicode_literals
import json
-import six
+# remove unused imports
+# import six
import octoprint_octolapse.utility as utility
+import octoprint_octolapse.script as script
from threading import Thread
import time
+import uuid
+import shutil
# This file is subject to the terms and conditions defined in
# file called 'LICENSE', which is part of this source code package.
import requests
import os
+import errno
# Todo: Do we need to add this to setup.py?
-from requests.auth import HTTPBasicAuth
+# remove unused import
+# from requests.auth import HTTPBasicAuth
from requests.exceptions import SSLError
from octoprint_octolapse.settings import CameraProfile, MjpgStreamerControl, MjpgStreamer
+from tempfile import mkdtemp
# create the module level logger
from octoprint_octolapse.log import LoggingConfigurator
@@ -73,7 +80,9 @@ def _load_camera_types(data_path):
server_types = camera_files["server_types"]
# loop through each server type
- for key, server_type in six.iteritems(server_types):
+ # remove python 2 compatibility
+ # for key, server_type in six.iteritems(server_types):
+ for key, server_type in server_types.items():
camera_types["server_types"][key] = {'cameras': {}}
# load all of the individual camera type info files for the current server
for file_name in server_type["file_names"]:
@@ -120,7 +129,9 @@ def get_webcam_type(data_path, server_type, data):
control_setting.update(control)
controls[control_setting.id] = control_setting
elif isinstance(data, dict):
- for key, control in six.iteritems(data):
+ # remove python 2 compatibility
+ # for key, control in six.iteritems(data):
+ for key, control in data.items():
control_setting = MjpgStreamerControl()
control_setting.update(control)
controls[key] = control_setting
@@ -136,7 +147,9 @@ def get_webcam_type(data_path, server_type, data):
cameras = CameraControl.camera_types["server_types"][server_type]["cameras"]
# iterate the cameras dictionary for the given server type if possible
- for key, camera in six.iteritems(cameras):
+ # remove python 2 compatibility
+ # for key, camera in six.iteritems(cameras):
+ for key, camera in cameras.items():
# see if the current camera type matches the given data
if CameraControl._is_webcam_type(server_type, camera, data):
return {
@@ -166,45 +179,126 @@ def _is_webcam_type(server_type, camera, data):
return False
@staticmethod
- def apply_camera_settings(cameras, timeout_seconds=5):
+ def apply_camera_settings(cameras, retries=3, backoff_factor=0.1, no_wait=False):
errors = []
# make sure the supplied cameras are enabled and either webcams or script cameras
cameras = [x for x in cameras if x.camera_type in [
- CameraProfile.camera_type_webcam,
- CameraProfile.camera_type_script
+ CameraProfile.camera_type_webcam
]]
# create the threads
threads = []
for current_camera in cameras:
thread = None
- if current_camera.camera_type == CameraProfile.camera_type_webcam:
- if current_camera.webcam_settings.server_type == MjpgStreamer.server_type:
- thread = MjpgStreamerSettingsThread(profile=current_camera)
- elif current_camera.camera_type == CameraProfile.camera_type_script:
- thread = CameraSettingScriptThread(current_camera)
+
+ if current_camera.webcam_settings.server_type == MjpgStreamer.server_type:
+ thread = MjpgStreamerSettingsThread(profile=current_camera, retries=retries, backoff_factor=backoff_factor)
+ thread.daemon = True
if thread:
threads.append(thread)
+ # start the threads
+ for thread in threads:
+ thread.start()
+
+ if not no_wait:
+ # join the threads, but timeout in a reasonable way
+ for thread in threads:
+ thread.join(requests.packages.urllib3.util.retry.Retry.BACKOFF_MAX)
+ if not thread.success:
+ for error in thread.errors:
+ errors.append(error)
+ return len(errors) == 0, CameraControl._get_errors_string(errors)
+ return True, ""
+
+ @staticmethod
+ def run_on_print_start_script(cameras):
+ # build the arg list
+ args_list = []
+ # remove python 2 compatibility
+ # for key, camera in six.iteritems(cameras):
+ for key, camera in cameras.items():
+ script_path = camera.on_print_start_script.strip()
+ if not script_path or not camera.enabled:
+ # skip any cameras where there is no on print start script or the camera is disabled
+ continue
+ script_args = [camera.name]
+ script_type = 'on print start'
+
+ args = {
+ 'camera': camera,
+ 'script_path': script_path,
+ 'script_args': script_args,
+ 'script_type': script_type
+ }
+ args_list.append(args)
+
+ if len(args_list) > 0:
+ return CameraControl._run_camera_scripts(args_list)
+
+ return True, None
+
+ @staticmethod
+ def run_on_print_end_script(cameras):
+ # build the arg list
+ args_list = []
+ # remove python 2 compatibility
+ # for key, camera in six.iteritems(cameras):
+ for key, camera in cameras.items():
+ script_path = camera.on_print_end_script.strip()
+ if not script_path or not camera.enabled:
+ # skip any cameras where there is no on print start script or the camera is disabled
+ continue
+ script_args = [camera.name]
+ script_type = 'on print end'
+
+ args = {
+ 'camera': camera,
+ 'script_path': script_path,
+ 'script_args': script_args,
+ 'script_type': script_type
+ }
+ args_list.append(args)
+
+ if len(args_list) > 0:
+ return CameraControl._run_camera_scripts(args_list)
+ return True, None
+
+ @staticmethod
+ def _run_camera_scripts(args_list, timeout_seconds=5):
+ errors = []
+
+ # create the threads
+ threads = []
+ for args in args_list:
+ thread = CameraSettingScriptThread(
+ args['camera'],
+ args['script_path'],
+ args['script_args'],
+ args['script_type']
+ )
+ thread.daemon = True
+ threads.append(thread)
+
# start the threads
for thread in threads:
thread.start()
start_time = time.time()
- timeout_time = start_time + 5
+ timeout_time = start_time + timeout_seconds
# join the threads, but timeout in a reasonable way
for thread in threads:
timeout_sec = timeout_time - time.time()
if timeout_sec < 0:
timeout_sec = 0.001
thread.join(timeout_sec)
- if not thread.success:
- for error in thread.errors:
- errors.append(error)
+ if thread.error:
+ errors.append(thread.error)
return len(errors) == 0, CameraControl._get_errors_string(errors)
+
@staticmethod
def _get_errors_string(errors):
if len(errors) == 0:
@@ -223,7 +317,6 @@ def _get_errors_string(errors):
unknown_errors = "{} unknown errors, check plugin.octolapse.log for details.".format(unknown_errors_count)
return "{}{}".format(camera_errors, unknown_errors)
-
@staticmethod
def apply_webcam_setting(
server_type,
@@ -232,19 +325,18 @@ def apply_webcam_setting(
address,
username,
password,
- ignore_ssl_error,
- timeout_seconds=5
+ ignore_ssl_error
):
if server_type == 'mjpg-streamer':
thread = MjpgStreamerSettingThread(
setting,
- camera_name=camera_name,
- address=address,
- username=username,
- password=password,
- ignore_ssl_error=ignore_ssl_error,
- timeout_seconds=timeout_seconds
+ address,
+ username,
+ password,
+ ignore_ssl_error,
+ camera_name
)
+ thread.daemon = True
thread.start()
thread.join()
return thread.success, thread.errors
@@ -261,7 +353,8 @@ def get_webcam_settings(
username,
password,
ignore_ssl_error,
- timeout_seconds=5
+ retries=3,
+ backoff_factor=0.1
):
try:
errors = []
@@ -274,8 +367,10 @@ def get_webcam_settings(
password=password,
ignore_ssl_error=ignore_ssl_error,
camera_name=camera_name,
- timeout_seconds=timeout_seconds
+ retries=retries,
+ backoff_factor=backoff_factor
)
+ thread.daemon = True
thread.start()
thread.join()
if thread.errors:
@@ -332,14 +427,24 @@ def get_webcam_server_type_from_request(r):
def _test_mjpg_streamer_control(camera_profile, timeout_seconds=2):
url = camera_profile.webcam_settings.address + "?action=command&id=-1"
try:
+ s = requests.Session()
+ s.verify = not camera_profile.webcam_settings.ignore_ssl_error
if len(camera_profile.webcam_settings.username) > 0:
- r = requests.get(url, auth=HTTPBasicAuth(camera_profile.webcam_settings.username,
- camera_profile.webcam_settings.password),
- verify=not camera_profile.webcam_settings.ignore_ssl_error,
- timeout=float(timeout_seconds))
- else:
- r = requests.get(
- url, verify=not camera_profile.webcam_settings.ignore_ssl_error, timeout=float(timeout_seconds))
+ s.auth = (
+ camera_profile.webcam_settings.username,
+ camera_profile.webcam_settings.password
+ )
+
+ r = utility.requests_retry_session(session=s).request("GET", url, timeout=timeout_seconds)
+
+ #if len(camera_profile.webcam_settings.username) > 0:
+ # r = requests.get(url, auth=HTTPBasicAuth(camera_profile.webcam_settings.username,
+ # camera_profile.webcam_settings.password),
+ # verify=not camera_profile.webcam_settings.ignore_ssl_error,
+ # timeout=float(timeout_seconds))
+ #else:
+ # r = requests.get(
+ # url, verify=not camera_profile.webcam_settings.ignore_ssl_error, timeout=float(timeout_seconds))
webcam_server_type = CameraControl.get_webcam_server_type_from_request(r)
if webcam_server_type != "mjpg-streamer":
@@ -350,15 +455,14 @@ def _test_mjpg_streamer_control(camera_profile, timeout_seconds=2):
raise CameraError('unknown-server-type', message)
if r.status_code == 501:
message = "The server denied access to the mjpg-streamer control.htm for the '{0}' camera profile. Please see this link to correct this " \
+ "href=\"https://github.com/FormerLurker/Octolapse/wiki/V0.4---Enabling-Camera-Controls\" target = \"_blank\">Please see this link to correct this " \
"error., or disable the 'Enable And Apply Preferences at Startup' and " \
"'Enable And Apply Preferences Before Print' options.".format(camera_profile.name)
logger.error(message)
- raise CameraError("mjpg_streamer-control-error", message)
+ raise CameraError("mjpg_streamer_control_error", message)
if r.status_code != requests.codes.ok:
message = "Status code received ({0}) was not OK. Double check your webcam 'Base Addresss' address and " \
- "your 'Snapshot Address Template'. Or, disable the 'Enable And Apply Preferences at Startup' " \
+ "your 'Snapshot Address'. Or, disable the 'Enable And Apply Preferences at Startup' " \
"and 'Enable And Apply Preferences Before Print' options for the {1} camera " \
"profile and try again.".format(r.status_code, camera_profile.name)
logger.error(message)
@@ -392,15 +496,27 @@ def _test_web_camera_image_preferences(camera_profile, timeout_seconds=2):
# first see what kind of server we have
url = format_request_template(
camera_profile.webcam_settings.address, camera_profile.webcam_settings.snapshot_request_template, "")
+
try:
+ s = requests.Session()
+ s.verify = not camera_profile.webcam_settings.ignore_ssl_error
if len(camera_profile.webcam_settings.username) > 0:
- r = requests.get(url, auth=HTTPBasicAuth(camera_profile.webcam_settings.username,
- camera_profile.webcam_settings.password),
- verify=not camera_profile.webcam_settings.ignore_ssl_error,
- timeout=float(timeout_seconds))
- else:
- r = requests.get(url, verify=not camera_profile.webcam_settings.ignore_ssl_error,
- timeout=float(timeout_seconds))
+ s.auth = (
+ camera_profile.webcam_settings.username,
+ camera_profile.webcam_settings.password
+ )
+
+ r = utility.requests_retry_session(session=s).request("GET", url, timeout=timeout_seconds)
+
+
+ # if len(camera_profile.webcam_settings.username) > 0:
+ # r = requests.get(url, auth=HTTPBasicAuth(camera_profile.webcam_settings.username,
+ # camera_profile.webcam_settings.password),
+ # verify=not camera_profile.webcam_settings.ignore_ssl_error,
+ # timeout=float(timeout_seconds))
+ # else:
+ # r = requests.get(url, verify=not camera_profile.webcam_settings.ignore_ssl_error,
+ # timeout=float(timeout_seconds))
webcam_server_type = CameraControl.get_webcam_server_type_from_request(r)
@@ -413,7 +529,7 @@ def _test_web_camera_image_preferences(camera_profile, timeout_seconds=2):
raise CameraError('ssl-error', message, cause=e)
except requests.ConnectionError as e:
message = "Unable to connect to '{0}' for the '{1}' camera profile. Please double check your 'Base Address' " \
- "and 'Snapshot Address Template' settings.".format(url, camera_profile.name)
+ "and 'Snapshot Address' settings.".format(url, camera_profile.name)
logger.exception(message)
raise CameraError('connection-error', message, cause=e)
except Exception as e:
@@ -451,14 +567,35 @@ def _test_web_camera(camera_profile, timeout_seconds=2, is_before_print_test=Fal
url = format_request_template(
camera_profile.webcam_settings.address, camera_profile.webcam_settings.snapshot_request_template, "")
try:
+ s = requests.Session()
+ s.verify = not camera_profile.webcam_settings.ignore_ssl_error
if len(camera_profile.webcam_settings.username) > 0:
- r = requests.get(url, auth=HTTPBasicAuth(camera_profile.webcam_settings.username,
- camera_profile.webcam_settings.password),
- verify=not camera_profile.webcam_settings.ignore_ssl_error,
- timeout=float(timeout_seconds))
- else:
- r = requests.get(
- url, verify=not camera_profile.webcam_settings.ignore_ssl_error, timeout=float(timeout_seconds))
+ s.auth = (
+ camera_profile.webcam_settings.username,
+ camera_profile.webcam_settings.password
+ )
+ retry_session = utility.requests_retry_session(session=s)
+ r = retry_session.get(url, stream=True, timeout=timeout_seconds)
+
+ body = []
+ start_time = time.time()
+ for chunk in r.iter_content(1024):
+ body.append(chunk)
+ if time.time() > (start_time + timeout_seconds):
+ message = (
+ "A read timeout occurred while connecting to {0} for the '{1}' camera profile. Are you using the video stream URL by mistake?"
+ .format(url, camera_profile.name)
+ )
+ logger.exception(message)
+ raise CameraError('read-timeout', message)
+ #if len(camera_profile.webcam_settings.username) > 0:
+ # r = requests.get(url, auth=HTTPBasicAuth(camera_profile.webcam_settings.username,
+ # camera_profile.webcam_settings.password),
+ # verify=not camera_profile.webcam_settings.ignore_ssl_error,
+ # timeout=float(timeout_seconds))
+ #else:
+ # r = requests.get(
+ # url, verify=not camera_profile.webcam_settings.ignore_ssl_error, timeout=float(timeout_seconds))
if r.status_code == requests.codes.ok:
if 'content-length' in r.headers and r.headers["content-length"] == 0:
message = "The request contained no data for the '{0}' camera profile.".format(camera_profile.name)
@@ -466,16 +603,20 @@ def _test_web_camera(camera_profile, timeout_seconds=2, is_before_print_test=Fal
raise CameraError('request-contained-no-data', message)
elif "image/jpeg" not in r.headers["content-type"].lower():
message = (
- "The returned daata was not an image for the '{0}' camera profile.".format(camera_profile.name)
+ "The returned data was not an image for the '{0}' camera profile.".format(camera_profile.name)
)
logger.error(message)
raise CameraError('not-an-image', message)
- elif not is_before_print_test or camera_profile.apply_settings_before_print:
+ elif (
+ is_before_print_test and
+ camera_profile.enable_custom_image_preferences and
+ camera_profile.apply_settings_before_print
+ ):
CameraControl._test_web_camera_image_preferences(camera_profile, timeout_seconds)
else:
message = (
"An invalid status code or {0} was returned from the '{1}' camera profile."
- .format(r.status_code, camera_profile.name)
+ .format(r.status_code, camera_profile.name)
)
logger.error(message)
raise CameraError('invalid-status-code', message)
@@ -520,6 +661,283 @@ def _test_web_camera(camera_profile, timeout_seconds=2, is_before_print_test=Fal
logger.exception(message)
raise CameraError('missing-schema', message, cause=e)
+ @staticmethod
+ def test_script(camera_profile, script_type, base_folder):
+ snapshot_created = None
+ if script_type == 'snapshot':
+ success, error, snapshot_created = CameraControl._test_camera_snapshot_script(camera_profile, script_type, base_folder)
+ elif script_type in ['before-snapshot', 'after-snapshot']:
+ success, error = CameraControl._test_camera_before_after_snapshot_script(
+ camera_profile, script_type, base_folder
+ )
+ elif script_type in ['before-print', 'after-print']:
+ success, error = CameraControl._test_print_script(camera_profile, script_type, base_folder)
+ elif script_type == 'before-render':
+ success, error = CameraControl._test_before_render_script(camera_profile, script_type, base_folder)
+ elif script_type == 'after-render':
+ success, error = CameraControl._test_after_render_script(camera_profile, script_type, base_folder)
+ else:
+ return False, "An unknown script type of {0} was sent. Cannot test script".format(script), None
+
+ return success, error, snapshot_created
+
+ @staticmethod
+ def _test_camera_snapshot_script(camera_profile, script_type, base_folder):
+ """Test a script camera."""
+ # create a temp directory for use with this test
+ temp_directory = mkdtemp()
+
+ try:
+ camera_name = camera_profile.name
+ snapshot_number = 0
+ delay_seconds = camera_profile.delay
+ data_directory = temp_directory
+ snapshot_directory = os.path.join(
+ data_directory, "{}".format(uuid.uuid4()), "{}".format(uuid.uuid4())
+ )
+ snapshot_filename = utility.get_snapshot_filename(
+ "test_snapshot", snapshot_number
+ )
+ snapshot_full_path = os.path.join(snapshot_directory, snapshot_filename)
+ timeout_seconds = camera_profile.timeout_ms / 1000.0
+
+ script_path = camera_profile.external_camera_snapshot_script
+
+ cmd = script_job = script.CameraScriptSnapshot(
+ script_path,
+ camera_name,
+ snapshot_number,
+ delay_seconds,
+ data_directory,
+ snapshot_directory,
+ snapshot_filename,
+ snapshot_full_path,
+ timeout_seconds=timeout_seconds
+ )
+ cmd.run()
+ # check to see if the snapshot image was created
+ success = cmd.success()
+ snapshot_created = os.path.exists(snapshot_full_path)
+ return cmd.success(), cmd.error_message, snapshot_created
+ finally:
+ utility.rmtree(temp_directory)
+
+ @staticmethod
+ def _test_camera_before_after_snapshot_script(camera_profile, script_type, base_folder):
+ """Test a script camera."""
+ # create a temp directory for use with this test
+ temp_directory = mkdtemp()
+
+ try:
+ camera_name = camera_profile.name
+ snapshot_number = 0
+ delay_seconds = camera_profile.delay
+ data_directory = temp_directory
+ snapshot_directory = os.path.join(
+ data_directory, "{}".format(uuid.uuid4()), "{}".format(uuid.uuid4())
+ )
+ snapshot_filename = utility.get_snapshot_filename(
+ "test_snapshot", snapshot_number
+ )
+ snapshot_full_path = os.path.join(snapshot_directory, snapshot_filename)
+ timeout_seconds = camera_profile.timeout_ms / 1000.0
+
+ # setup test depending on the script_type
+ script_path = ""
+ if script_type == 'before-snapshot':
+ script_path = camera_profile.on_before_snapshot_script
+ elif script_type == 'after-snapshot':
+ script_path = camera_profile.on_after_snapshot_script
+ # we need to add an image to the temp folder, in case the script operates on the image
+ test_image_path = os.path.join(base_folder, "data", "Images", "test-snapshot-image.jpg")
+ target_directory = os.path.dirname(snapshot_full_path)
+ if not os.path.exists(target_directory):
+ try:
+ os.makedirs(target_directory)
+ except OSError as e:
+ if e.errno == errno.EEXIST:
+ pass
+ else:
+ raise
+ shutil.copy(test_image_path, snapshot_full_path)
+
+ if script_type == 'before-snapshot':
+ cmd = script.CameraScriptBeforeSnapshot(
+ script_path,
+ camera_name,
+ snapshot_number,
+ delay_seconds,
+ data_directory,
+ snapshot_directory,
+ snapshot_filename,
+ snapshot_full_path,
+ timeout_seconds=timeout_seconds
+ )
+ else:
+ cmd = script.CameraScriptAfterSnapshot(
+ script_path,
+ camera_name,
+ snapshot_number,
+ delay_seconds,
+ data_directory,
+ snapshot_directory,
+ snapshot_filename,
+ snapshot_full_path,
+ timeout_seconds=timeout_seconds
+ )
+ cmd.run()
+ return cmd.success(), cmd.error_message
+ finally:
+ utility.rmtree(temp_directory)
+
+ @staticmethod
+ def _test_print_script(camera_profile, script_type, base_folder):
+ timeout_seconds = camera_profile.timeout_ms / 1000.0
+ # build the arg list
+ if script_type == "before-print":
+ script_path = camera_profile.on_print_start_script.strip()
+ else:
+ script_path = camera_profile.on_print_end_script.strip()
+
+ if script_type == "before-print":
+ cmd = script.CameraScriptBeforePrint(
+ script_path,
+ camera_profile.name,
+ timeout_seconds=timeout_seconds
+ )
+ else:
+ cmd = script.CameraScriptAfterPrint(
+ script_path,
+ camera_profile.name,
+ timeout_seconds=timeout_seconds
+ )
+ cmd.run()
+ return cmd.success(), cmd.error_message
+
+ @staticmethod
+ def _test_before_render_script(camera_profile, script_type, base_folder):
+ timeout_seconds = camera_profile.timeout_ms / 1000.0
+ # create a temp folder for the rendered file and the snapshots
+ temp_directory = mkdtemp()
+
+ try:
+ # create 10 snapshots
+ test_image_path = os.path.join(base_folder, "data", "Images", "test-snapshot-image.jpg")
+ snapshot_directory = os.path.join(
+ temp_directory, "{}".format(uuid.uuid4()), "{}".format(uuid.uuid4())
+ )
+ if not os.path.exists(snapshot_directory):
+ try:
+ os.makedirs(snapshot_directory)
+ except OSError as e:
+ if e.errno == errno.EEXIST:
+ pass
+ else:
+ raise
+
+ for snapshot_number in range(10):
+ snapshot_file_name = utility.get_snapshot_filename(
+ 'test', snapshot_number
+ )
+ target_snapshot_path = os.path.join(snapshot_directory, snapshot_file_name)
+ shutil.copy(test_image_path, target_snapshot_path)
+
+ snapshot_filename_format = os.path.basename(
+ utility.get_snapshot_filename(
+ "render_script_test", utility.SnapshotNumberFormat
+ )
+ )
+ script_path = camera_profile.on_before_render_script.strip()
+
+ if script_path is None or len(script_path) == 0:
+ return False, "No script path was provided. Please enter a script path and try again."
+
+ if not os.path.isfile(script_path):
+ return False, "The script path '{0}' does not exist. Please enter a valid script path and try again.".format(script_path)
+
+ console_output = ""
+ error_message = ""
+
+ cmd = script.CameraScriptBeforeRender(
+ script_path,
+ camera_profile.name,
+ snapshot_directory,
+ snapshot_filename_format,
+ os.path.join(snapshot_directory, snapshot_filename_format),
+ timeout_seconds=timeout_seconds
+ )
+ cmd.run()
+ return cmd.success(), cmd.error_message
+ finally:
+ utility.rmtree(temp_directory)
+
+ @staticmethod
+ def _test_after_render_script(camera_profile, script_type, base_folder):
+
+ # create a temp folder for the rendered file and the snapshots
+ temp_directory = mkdtemp()
+ timeout_seconds = camera_profile.timeout_ms / 1000.0
+ try:
+ # create 10 snapshots
+ test_image_path = os.path.join(base_folder, "data", "Images", "test-snapshot-image.jpg")
+ snapshot_directory = os.path.join(
+ temp_directory, "{}".format(uuid.uuid4()), "{}".format(uuid.uuid4())
+ )
+ if not os.path.exists(snapshot_directory):
+ try:
+ os.makedirs(snapshot_directory)
+ except OSError as e:
+ if e.errno == errno.EEXIST:
+ pass
+ else:
+ raise
+
+ for snapshot_number in range(10):
+ snapshot_file_name = utility.get_snapshot_filename(
+ 'test', snapshot_number
+ )
+ target_snapshot_path = os.path.join(snapshot_directory, snapshot_file_name)
+ shutil.copy(test_image_path, target_snapshot_path)
+
+ snapshot_filename_format = os.path.basename(
+ utility.get_snapshot_filename(
+ "render_script_test", utility.SnapshotNumberFormat
+ )
+ )
+
+
+ script_path = camera_profile.on_after_render_script.strip()
+ rendering_path = os.path.join(temp_directory, "timelapse", "test_rendering.mp4")
+
+ output_filepath = utility.get_collision_free_filepath(rendering_path)
+ output_filename = utility.get_filename_from_full_path(rendering_path)
+ output_directory = utility.get_directory_from_full_path(rendering_path)
+ output_extension = utility.get_extension_from_full_path(rendering_path)
+
+ if script_path is None or len(script_path) == 0:
+ return False, "No script path was provided. Please enter a script path and try again."
+
+ if not os.path.exists(script_path):
+ return False, "The script path '{0}' does not exist. Please enter a valid script path and try again.".format(
+ script_path)
+
+ cmd = script.CameraScriptAfterRender(
+ script_path,
+ camera_profile.name,
+ snapshot_directory,
+ snapshot_filename_format,
+ os.path.join(snapshot_directory, snapshot_filename_format),
+ output_directory,
+ output_filename,
+ output_extension,
+ rendering_path,
+ timeout_seconds=timeout_seconds
+ )
+ cmd.run()
+ return cmd.success(), cmd.error_message
+ finally:
+ utility.rmtree(temp_directory)
+
@staticmethod
def load_webcam_defaults(
server_type,
@@ -528,7 +946,8 @@ def load_webcam_defaults(
username,
password,
ignore_ssl_error,
- timeout_seconds=5):
+ retries=3,
+ backoff_factor=0.1):
if server_type == MjpgStreamer.server_type:
@@ -540,14 +959,16 @@ def load_webcam_defaults(
username,
password,
ignore_ssl_error,
- timeout_seconds=timeout_seconds
+ retries=retries,
+ backoff_factor=backoff_factor
)
if not success:
return False, errors
# set the control values to the defaults
controls = settings["webcam_settings"]["mjpg_streamer"]["controls"]
- for key, control in six.iteritems(controls):
-
+ # remove python 2 compatibility
+ # for key, control in six.iteritems(controls):
+ for key, control in controls.items():
control.value = control.default
controls[key] = control.to_dict()
@@ -559,8 +980,10 @@ def load_webcam_defaults(
password=password,
ignore_ssl_error=ignore_ssl_error,
camera_name=camera_name,
- timeout_seconds=timeout_seconds
+ retries=retries,
+ backoff_factor=backoff_factor
)
+ thread.daemon = True
thread.start()
thread.join()
@@ -581,7 +1004,8 @@ def __init__(
password=None,
ignore_ssl_error=False,
camera_name=None,
- timeout_seconds=4
+ retries=3,
+ backoff_factor=0.1
):
super(MjpgStreamerThread, self).__init__()
if profile:
@@ -589,18 +1013,19 @@ def __init__(
self.username = profile.webcam_settings.username
self.password = profile.webcam_settings.password
self.ignore_ssl_error = profile.webcam_settings.ignore_ssl_error
- self.timeout_seconds = timeout_seconds
self.camera_name = profile.name
else:
self.address = address
self.username = username
self.password = password
self.ignore_ssl_error = ignore_ssl_error
- self.timeout_seconds = timeout_seconds
self.camera_name = camera_name
- if isinstance(self.address, six.string_types):
+ # remove python 2 compatibility
+ # if isinstance(self.address, six.string_types):
+ if isinstance(self.address, str):
self.address = self.address.strip()
-
+ self.retries = retries
+ self.backoff_factor=backoff_factor
self.errors = []
self.success = False
@@ -614,7 +1039,8 @@ def __init__(
password=None,
ignore_ssl_error=False,
camera_name=None,
- timeout_seconds=4
+ retries=3,
+ backoff_factor=0.1
):
super(MjpgStreamerControlThread, self).__init__(
profile=profile,
@@ -623,7 +1049,8 @@ def __init__(
password=password,
ignore_ssl_error=ignore_ssl_error,
camera_name=camera_name,
- timeout_seconds=timeout_seconds
+ retries=retries,
+ backoff_factor=backoff_factor
)
self.controls = None
@@ -631,7 +1058,7 @@ def run(self):
try:
self.controls = self.get_controls_from_server()
except CameraError as e:
- logger.exception(e)
+ logger.exception("An unexpected error occurred while running the MjpgStreamerControlThread.")
self.errors.append(e)
def get_controls_from_server(self):
@@ -648,32 +1075,22 @@ def get_controls_from_server(self):
return control_settings
def get_file(self, file_name):
+
+ url = "{camera_address}{file_name}".format(camera_address=self.address, file_name=file_name)
try:
- url = "{camera_address}{file_name}".format(camera_address=self.address, file_name=file_name)
+ s = requests.Session()
+ s.verify = not self.ignore_ssl_error
if len(self.username) > 0:
- r = requests.get(url, auth=HTTPBasicAuth(self.username, self.password),
- verify=not self.ignore_ssl_error, timeout=float(self.timeout_seconds))
- else:
- r = requests.get(url, verify=not self.ignore_ssl_error,
- timeout=float(self.timeout_seconds))
-
- if r.status_code == 501:
- message = "Access was denied to the mjpg-streamer {0} file for the " \
- "'{1}' camera profile.".format(file_name, self.camera_name)
- raise CameraError("mjpg_streamer-control-error", message)
- if r.status_code != requests.codes.ok:
- message = (
- "Recived a status code of ({0}) while retrieving the {1} file from the {2} camera profile. Double "
- "check your 'Base Address' and 'Snapshot Address Template' within your camera profile settings."
- .format(r.status_code, file_name, self.camera_name)
- )
- raise CameraError('webcam_settings_apply_error', message)
- try:
- data = json.loads(r.text)
- except ValueError as e:
- raise CameraError('json_error', "Unable to read the input.json file from mjpg-streamer. Please chack "
- "your base address and try again.", cause=e)
- return data
+ s.auth = (self.username, self.password)
+
+ r = utility.requests_retry_session(session=s, retries=self.retries,
+ backoff_factor=self.backoff_factor).request("GET", url)
+ #if len(self.username) > 0:
+ # r = requests.get(url, auth=HTTPBasicAuth(self.username, self.password),
+ # verify=not self.ignore_ssl_error, timeout=float(self.timeout_seconds))
+ #else:
+ # r = requests.get(url, verify=not self.ignore_ssl_error,
+ # timeout=float(self.timeout_seconds))
except SSLError as e:
message = (
"An SSL error was raised while retrieving the {0} file for the '{1}' camera profile."
@@ -683,15 +1100,36 @@ def get_file(self, file_name):
except requests.ConnectionError as e:
message = (
"Unable to connect to the camera to '{0}' to retrieve controls for the {1} camera profile."
- .format(url, self.camera_name)
+ .format(url, self.camera_name)
)
- raise CameraError("connection-error", message, cause=e)
+ raise CameraError("connection_error", message, cause=e)
except Exception as e:
message = (
"An unexpected error was raised while retrieving the {0} file for the '{1}' camera profile."
- .format(file_name, self.camera_name)
+ .format(file_name, self.camera_name)
+ )
+ raise CameraError('unexpected_error', message, cause=e)
+
+ if r.status_code == 501:
+ message = "Access was denied to the mjpg-streamer {0} file for the " \
+ "'{1}' camera profile.".format(file_name, self.camera_name)
+ raise CameraError("access_denied", message)
+ if r.status_code == 404:
+ message = "Unable to find the camera at the supplied base address for the " \
+ "'{0}' camera profile.".format(self.camera_name)
+ raise CameraError("file_not_found", message)
+ if r.status_code != requests.codes.ok:
+ message = (
+ "Recived a status code of ({0}) while retrieving the {1} file from the {2} camera profile."
+ .format(r.status_code, file_name, self.camera_name)
)
- raise CameraError('unexpected-error', message, cause=e)
+ raise CameraError('unexpected_status_code', message)
+ try:
+ data = json.loads(r.text, strict=False)
+ except ValueError as e:
+ raise CameraError('json_error', "Unable to read the input.json file from mjpg-streamer. Please chack "
+ "your base address and try again.", cause=e)
+ return data
class MjpgStreamerSettingsThread(MjpgStreamerThread):
@@ -704,7 +1142,8 @@ def __init__(
password=None,
ignore_ssl_error=False,
camera_name=None,
- timeout_seconds=4
+ retries=3,
+ backoff_factor=0.1
):
super(MjpgStreamerSettingsThread, self).__init__(
profile=profile,
@@ -713,7 +1152,8 @@ def __init__(
password=password,
ignore_ssl_error=ignore_ssl_error,
camera_name=camera_name,
- timeout_seconds=timeout_seconds
+ retries=retries,
+ backoff_factor=backoff_factor
)
if profile:
mjpg_streamer = profile.webcam_settings.mjpg_streamer.clone()
@@ -734,8 +1174,9 @@ def apply_mjpg_streamer_settings(self):
controls_list = []
-
- for key, control in six.iteritems(self.controls):
+ # remove python 2 compatibility
+ # for key, control in six.iteritems(self.controls):
+ for key, control in self.controls.items():
controls_list.append(control)
# Sort the controls. They need to be sent in order.
@@ -754,8 +1195,10 @@ def apply_mjpg_streamer_settings(self):
self.password,
self.ignore_ssl_error,
self.camera_name,
- timeout_seconds=self.timeout_seconds
+ retries=self.retries,
+ backoff_factor=self.backoff_factor
)
+ thread.daemon = True
threads.append(thread)
if len(threads) > 0:
@@ -770,6 +1213,7 @@ def apply_mjpg_streamer_settings(self):
if not self.success:
for error in errors:
self.errors.append(error)
+ break # Do not continue applying settings if one fails.
self.success = len(self.errors) == 0
@@ -782,7 +1226,8 @@ def __init__(
password,
ignore_ssl_error,
camera_name,
- timeout_seconds=4
+ retries=3,
+ backoff_factor=0.1
):
super(MjpgStreamerSettingThread, self).__init__(
address=address,
@@ -790,7 +1235,8 @@ def __init__(
password=password,
ignore_ssl_error=ignore_ssl_error,
camera_name=camera_name,
- timeout_seconds=timeout_seconds
+ retries=retries,
+ backoff_factor=backoff_factor
)
self.control = control
@@ -830,14 +1276,22 @@ def apply_mjpg_streamer_setting(self):
address=self.address,
querystring=querystring
)
- logger.debug("Changing %s to %s for %s. Querystring: %s", name, str(value), self.camera_name, querystring)
+ logger.debug("Changing %s to %s for %s. Request: %s", name, str(value), self.camera_name, url)
try:
+ # old version without session
+ #if len(self.username) > 0:
+ # r = requests.get(url, auth=HTTPBasicAuth(self.username, self.password),
+ # verify=not self.ignore_ssl_error, timeout=float(self.timeout_seconds))
+ #else:
+ # r = requests.get(url, verify=not self.ignore_ssl_error,
+ # timeout=float(self.timeout_seconds))
+
+ s = requests.Session()
+ s.verify = not self.ignore_ssl_error
if len(self.username) > 0:
- r = requests.get(url, auth=HTTPBasicAuth(self.username, self.password),
- verify=not self.ignore_ssl_error, timeout=float(self.timeout_seconds))
- else:
- r = requests.get(url, verify=not self.ignore_ssl_error,
- timeout=float(self.timeout_seconds))
+ s.auth = (self.username, self.password)
+
+ r = utility.requests_retry_session(session=s, retries=self.retries, backoff_factor=self.backoff_factor).request("GET", url)
webcam_server_type = CameraControl.get_webcam_server_type_from_request(r)
if webcam_server_type != "mjpg-streamer":
@@ -849,17 +1303,16 @@ def apply_mjpg_streamer_setting(self):
if r.status_code == 501:
message = "Access was denied to the mjpg-streamer control.html while applying the {0} setting to the '{" \
"1}' camera profile. Please see this link to correct this " \
+ "href=\"https://github.com/FormerLurker/Octolapse/wiki/V0.4---Enabling-Camera-Controls\" target = \"_blank\">Please see this link to correct this " \
"error., disable the 'Enable And Apply Preferences at Startup' " \
"and 'Enable And Apply Preferences Before Print' options '.".format(name,
self.camera_name)
logger.error(message)
- raise CameraError("mjpg_streamer-control-error", message)
+ raise CameraError("mjpg_streamer_control_error", message)
if r.status_code != requests.codes.ok:
message = (
"Recived a status code of ({0}) while applying the {1} settings to the {2} camera profile. "
- "Double check your 'Base Address' and 'Snapshot Address Template' within your camera profile "
+ "Double check your 'Base Address' and 'Snapshot Address' within your camera profile "
"settings. Or disable 'Custom Image Preferences' for this profile and try again.".format(
r.status_code, name, self.camera_name
)
@@ -873,73 +1326,42 @@ def apply_mjpg_streamer_setting(self):
"An SSL error was raised while applying the {0} setting to the '{1}' camera profile."
.format(name, self.camera_name)
)
- logger.error(message)
+ logger.exception(message)
raise CameraError('ssl_error', message, cause=e)
except Exception as e:
message = (
"An unexpected error was raised while applying the {0} setting to the '{1}' camera profile."
.format(name, self.camera_name)
)
- logger.error(message)
+ logger.exception(message)
raise CameraError('webcam_settings_apply_error', message, cause=e)
class CameraSettingScriptThread(Thread):
- def __init__(self, camera):
+ def __init__(self, camera, script_path, script_args, script_type):
super(CameraSettingScriptThread, self).__init__()
self.Camera = camera
self.camera_name = camera.name
- self.errors = []
+ self.script_path = script_path.strip()
+ self.script_type = script_type
+ self.script_args = script_args
+ self.console_output = ""
+ self.error = None
def run(self):
- try:
- script = self.Camera.on_print_start_script.strip()
- logger.info(
- "Executing the 'Before Print Starts' script at %s for the '%s' camera.", script, self.camera_name
+ if self.script_type == "before-print":
+ cmd = script.CameraScriptBeforePrint(
+ self.script_path,
+ self.camera_name
)
- if not script:
- message = "The Camera Initialization script is empty"
- logger.error(message)
- raise CameraError('no_camera_script_path', message)
- try:
- script_args = [
- script,
- self.Camera.name
- ]
- cmd = utility.POpenWithTimeout()
- return_code = cmd.run(script_args, None)
- console_output = cmd.stdout
- error_message = cmd.stderr
- except utility.POpenWithTimeout.ProcessError as e:
- message = "An OS Error error occurred while executing the custom camera initialization script"
- logger.exception(message)
- raise CameraError('camera_initialization_error', message, cause=e)
-
- if error_message is not None:
- if error_message.endswith("\r\n"):
- error_message = error_message[:-2]
- if not return_code == 0:
- if error_message is not None:
- error_message = "The custom camera initialization script failed with the following error message: {0}" \
- .format(error_message)
- else:
- error_message = (
- "The custom camera initialization script returned {0},"
- " which indicates an error.".format(return_code)
- )
- logger.exception(error_message)
- elif error_message is not None:
- logger.warn(
- "The console returned an error while running the script at %s for the '%s' camera. Details:%s",
- script, self.camera_name, error_message
- )
- else:
- logger.info(
- "The 'Before Print Starts' script for the %s camera completed successfully.", self.camera_name
- )
- raise CameraError('camera_initialization_error', error_message)
- except CameraError as e:
- self.errors.append(e)
+ else:
+ cmd = script.CameraScriptAfterPrint(
+ self.script_path,
+ self.camera_name
+ )
+ cmd.run()
+ if not cmd.success():
+ self.error = CameraError('error_message_returned', cmd.error_message)
class CameraError(Exception):
diff --git a/octoprint_octolapse/data/Images/no-camera-selected.png b/octoprint_octolapse/data/Images/no-camera-selected.png
index a47f15d5..a25823f1 100644
Binary files a/octoprint_octolapse/data/Images/no-camera-selected.png and b/octoprint_octolapse/data/Images/no-camera-selected.png differ
diff --git a/octoprint_octolapse/data/Images/no-image-available.png b/octoprint_octolapse/data/Images/no-image-available.png
index a47f15d5..be147974 100644
Binary files a/octoprint_octolapse/data/Images/no-image-available.png and b/octoprint_octolapse/data/Images/no-image-available.png differ
diff --git a/octoprint_octolapse/data/Images/no_snapshot.png b/octoprint_octolapse/data/Images/no_snapshot.png
index 53a72bd8..32234ed1 100644
Binary files a/octoprint_octolapse/data/Images/no_snapshot.png and b/octoprint_octolapse/data/Images/no_snapshot.png differ
diff --git a/octoprint_octolapse/data/Images/test-snapshot-image.jpg b/octoprint_octolapse/data/Images/test-snapshot-image.jpg
new file mode 100644
index 00000000..d65f2e91
Binary files /dev/null and b/octoprint_octolapse/data/Images/test-snapshot-image.jpg differ
diff --git a/octoprint_octolapse/data/lib/c/extruder.cpp b/octoprint_octolapse/data/lib/c/extruder.cpp
new file mode 100644
index 00000000..9f1a6e5d
--- /dev/null
+++ b/octoprint_octolapse/data/lib/c/extruder.cpp
@@ -0,0 +1,160 @@
+#include "extruder.h"
+#include "logging.h"
+
+extruder::extruder()
+{
+ x_firmware_offset = 0;
+ y_firmware_offset = 0;
+ z_firmware_offset = 0;
+ e = 0;
+ e_offset = 0;
+ e_relative = 0;
+ extrusion_length = 0;
+ extrusion_length_total = 0;
+ retraction_length = 0;
+ deretraction_length = 0;
+ is_extruding_start = false;
+ is_extruding = false;
+ is_primed = false;
+ is_retracting_start = false;
+ is_retracting = false;
+ is_retracted = false;
+ is_partially_retracted = false;
+ is_deretracting_start = false;
+ is_deretracting = false;
+ is_deretracted = false;
+}
+
+double extruder::get_offset_e() const
+{
+ return e - e_offset;
+}
+
+PyObject* extruder::to_py_tuple() const
+{
+ //std::cout << "Building extruder py_tuple.\r\n";
+ PyObject* py_extruder = Py_BuildValue(
+ // ReSharper disable once StringLiteralTypo
+ "ddddddddddllllllllll",
+ // Floats
+ x_firmware_offset, // 0
+ y_firmware_offset, // 1
+ z_firmware_offset, // 2
+ e, // 3
+ e_offset, // 4
+ e_relative, // 5
+ extrusion_length, // 6
+ extrusion_length_total, // 7
+ retraction_length, // 8
+ deretraction_length, // 9
+ // Bool (represented as an integer)
+ (long int)(is_extruding_start ? 1 : 0), // 10
+ (long int)(is_extruding ? 1 : 0), // 11
+ (long int)(is_primed ? 1 : 0), // 12
+ (long int)(is_retracting_start ? 1 : 0), // 13
+ (long int)(is_retracting ? 1 : 0), // 14
+ (long int)(is_retracted ? 1 : 0), // 15
+ (long int)(is_partially_retracted ? 1 : 0), // 16
+ (long int)(is_deretracting_start ? 1 : 0), // 17
+ (long int)(is_deretracting ? 1 : 0), // 18
+ (long int)(is_deretracted ? 1 : 0) // 19
+ );
+ if (py_extruder == NULL)
+ {
+ std::string message =
+ "extruder.to_py_tuple: Unable to convert extruder value to a PyObject tuple via Py_BuildValue.";
+ octolapse_log_exception(octolapse_log::GCODE_POSITION, message);
+ return NULL;
+ }
+ return py_extruder;
+}
+
+PyObject* extruder::to_py_dict() const
+{
+ PyObject* p_extruder = Py_BuildValue(
+ "{s:d,s:d,s:d,s:d,s:d,s:d,s:d,s:d,s:d,s:d,s:i,s:i,s:i,s:i,s:i,s:i,s:i,s:i,s:i,s:i}",
+ // FLOATS
+ "x_firmware_offset",
+ x_firmware_offset,
+ "y_firmware_offset",
+ y_firmware_offset,
+ "z_firmware_offset",
+ z_firmware_offset,
+ "e",
+ e,
+ "e_offset",
+ e_offset,
+ "e_relative",
+ e_relative,
+ "extrusion_length",
+ extrusion_length,
+ "extrusion_length_total",
+ extrusion_length_total,
+ "retraction_length",
+ retraction_length,
+ "deretraction_length",
+ deretraction_length,
+ // Bool (represented as an integer)
+ "is_extruding_start",
+ (long int)(is_extruding_start ? 1 : 0),
+ "is_extruding",
+ (long int)(is_extruding ? 1 : 0),
+ "is_primed",
+ (long int)(is_primed ? 1 : 0),
+ "is_retracting_start",
+ (long int)(is_retracting_start ? 1 : 0),
+ "is_retracting",
+ (long int)(is_retracting ? 1 : 0),
+ "is_retracted",
+ (long int)(is_retracted ? 1 : 0),
+ "is_partially_retracted",
+ (long int)(is_partially_retracted ? 1 : 0),
+ "is_deretracting_start",
+ (long int)(is_deretracting_start ? 1 : 0),
+ "is_deretracting",
+ (long int)(is_deretracting ? 1 : 0),
+ "is_deretracted",
+ (long int)(is_deretracted ? 1 : 0)
+ );
+ if (p_extruder == NULL)
+ {
+ std::string message = "extruder.to_py_dict: Unable to convert extruder value to a dict PyObject via Py_BuildValue.";
+ octolapse_log_exception(octolapse_log::GCODE_POSITION, message);
+ return NULL;
+ }
+ return p_extruder;
+}
+
+PyObject* extruder::build_py_object(extruder* p_extruders, const unsigned int num_extruders)
+{
+ //std::cout << "Building extruders py_object.\r\n";
+ PyObject* py_extruders = PyList_New(0);
+ if (py_extruders == NULL)
+ {
+ std::string message = "Error executing Extruder.build_py_object: Unable to create Extruder PyList object.";
+ octolapse_log_exception(octolapse_log::GCODE_POSITION, message);
+ return NULL;
+ }
+
+ // Create each snapshot plan
+ for (unsigned int index = 0; index < num_extruders; index++)
+ {
+ PyObject* py_extruder = p_extruders[index].to_py_tuple();
+ if (py_extruder == NULL)
+ {
+ return NULL;
+ }
+ bool success = !(PyList_Append(py_extruders, py_extruder) < 0); // reference to pSnapshotPlan stolen
+ if (!success)
+ {
+ std::string message =
+ "Error executing Extruder.build_py_object Unable to append the extruder to the extruders list.";
+ octolapse_log_exception(octolapse_log::GCODE_POSITION, message);
+ return NULL;
+ }
+ // Need to decref after PyList_Append, since it increfs the PyObject
+ Py_DECREF(py_extruder);
+ }
+
+ return py_extruders;
+}
diff --git a/octoprint_octolapse/data/lib/c/extruder.h b/octoprint_octolapse/data/lib/c/extruder.h
new file mode 100644
index 00000000..74537376
--- /dev/null
+++ b/octoprint_octolapse/data/lib/c/extruder.h
@@ -0,0 +1,36 @@
+#pragma once
+#ifdef _DEBUG
+//#undef _DEBUG
+#include ' + error_popup.original_title + '
'+ error_title_text +'
';
+ }
+ else
+ {
+ title_html =
+ '' + error_popup.original_title +
+ ' - ' + (error_popup.current_error_index+1).toString() + ' of ' + error_popup.errors.length +
+ '
'+ error_title_text +'
';
+ }
+ error_popup.$error_title.html(title_html);
+ };
+ error_popup.show_current_error = function()
+ {
+ var current_error = error_popup.current_error();
+ error_popup.$error_text.text(current_error.description);
+ error_popup.set_title();
+ // enable/disable buttons
+ // if we only have 1 error we don't want any previous/next buttons
+ if(error_popup.errors.length > 1)
+ {
+ // disable buttons as necessary
+ error_popup.$previous_button.prop('disabled', error_popup.current_error_index == 0);
+ error_popup.$next_button.prop('disabled', error_popup.current_error_index + 1 == self.errors.length);
+ }
+ };
+ error_popup.display_help_for_current_error = function()
+ {
+ var current_error = error_popup.current_error();
+ showHelpForLink(
+ current_error.help_link,
+ current_error.name,
+ "No help could be found for this error.");
+ };
+
+ error_popup.next_error = function()
+ {
+ error_popup.current_error_index = (error_popup.errors.length+error_popup.current_error_index+1) % error_popup.errors.length;
+ error_popup.show_current_error();
+ };
+
+ error_popup.previous_error = function()
+ {
+ error_popup.current_error_index = (error_popup.errors.length+error_popup.current_error_index-1) % error_popup.errors.length;
+ error_popup.show_current_error();
+ };
+
+ Octolapse.closeConfirmDialogsForKeys([remove_keys]);
+ // Make sure that the default pnotify buttons exist
+ Octolapse.checkPNotifyDefaultConfirmButtons();
+ Octolapse.ConfirmDialogs[popup_key] = (
+ new PNotify({
+ title: options.title,
+ text: options.text,
+ icon: options.icon,
+ hide: options.hide,
+ desktop: options.desktop,
+ type: options.type,
+ addclass: options.addclass,
+ confirm: {
+ confirm: true,
+ buttons: [{
+ text: 'Ok',
+ addClass: 'remove_button',
+ },{
+ text: 'Cancel',
+ addClass: 'remove_button',
+ },{
+ // Previous Error
+ text: '',
+ addClass: 'error_previous',
+ click: function(){
+ //console.log("Showing the previous error");
+ error_popup.previous_error();
+ }
+ },{
+ text: 'Help',
+ addClass: 'error_help',
+ click: function() {
+ var current_error = error_popup.current_error();
+ Octolapse.Help.showHelpForLink(
+ current_error.help_link,
+ current_error.name,
+ "No help could be found for this error.");
+ }
+ },{
+ // Next Error
+ text: '',
+ addClass: 'error_next',
+ click: function(){
+ //console.log("Showing the next error");
+ error_popup.next_error();
+ }
+ },{
+ text: 'Close',
+ addClass: 'error_close',
+ click: function(){
+ //console.log("Closing popup with key: " + popup_key.toString());
+ Octolapse.closeConfirmDialogsForKeys([popup_key]);
+ }
+ }]
+ },
+ buttons: {
+ closer: false,
+ sticker: false
+ },
+ history: {
+ history: false
+ },
+ before_open: function(notice) {
+ notice.get().find(".remove_button").remove();
+ error_popup.configure_notice(notice);
+ error_popup.show_current_error();
+ }
+ })
+ );
+ };
+ };
});
diff --git a/octoprint_octolapse/static/js/octolapse.helpers.js b/octoprint_octolapse/static/js/octolapse.helpers.js
new file mode 100644
index 00000000..0a13da23
--- /dev/null
+++ b/octoprint_octolapse/static/js/octolapse.helpers.js
@@ -0,0 +1,532 @@
+/*
+##################################################################################
+# Octolapse - A plugin for OctoPrint used for making stabilized timelapse videos.
+# Copyright (C) 2023 Brad Hochgesang
+##################################################################################
+# This program is free software: you can redistribute it and/or modify
+# it under the terms of the GNU Affero General Public License as published
+# by the Free Software Foundation, either version 3 of the License, or
+# (at your option) any later version.
+#
+# This program is distributed in the hope that it will be useful,
+# but WITHOUT ANY WARRANTY; without even the implied warranty of
+# MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
+# GNU Affero General Public License for more details.
+#
+# You should have received a copy of the GNU Affero General Public License
+# along with this program. If not, see the following:
+# https://github.com/FormerLurker/Octolapse/blob/master/LICENSE
+#
+# You can contact the author either through the git-hub repository, or at the
+# following email address: FormerLurker@pm.me
+##################################################################################
+*/
+$(function () {
+ Octolapse.ListViewColumn = function(text, id, options){
+ var self = this;
+ self.text = text;
+ self.id = id;
+ self.sortable = (options || {}).sortable || false;
+ self.sort_column_id = (options || {}).sort_column_id || id;
+ self.classes = (options || {}).class || "";
+ self.template_id = (options || {}).template_id || "octolapse-list-item";
+ self.visible_observable = (options || {}).visible_observable || true;
+ };
+
+ Octolapse.ListItemViewModel = function(parent, id, name, title, selected, value){
+ var self = this;
+ self.id = id;
+ self.name = name;
+ self.title = title;
+ self.value = value;
+ self.data = ko.observable();
+ self.data.parent = parent;
+ //self.selected = ko.observable(!!selected);
+ self.selected = ko.observable(!!selected);
+ self.disabled = ko.observable(false);
+ self.get_list_item_value = function(column){
+ var value = null;
+ if (self.value !== null && self.value[column.id] !== undefined)
+ value = self.value[column.id];
+ else if (self[column.id] !== undefined)
+ value = self[column.id];
+
+ return {
+ item: self,
+ column: column,
+ value: value
+ };
+ };
+ };
+
+ Octolapse.ListViewModel = function (parent, id, options){
+ var self = this;
+ self.data = ko.observable();
+ self.data.parent = parent;
+ self.list_id = id;
+ self.options = options ? options : {};
+ self.current_page_index = ko.observable(0);
+ self.all_selected = ko.observable(false);
+ self.page_selected = ko.observable(false);
+ self.page_size = ko.observable(10);
+ self.has_loaded = ko.observable(false);
+ // Must be at least 6 pages, can be more.
+ self.list_items = ko.observableArray([]);
+ self.page_sizes = [
+ {name: "10", value: 10},
+ {name: "25", value: 25},
+ {name: "50", value: 50},
+ {name: "100", value: 100},
+ {name: "250", value: 250},
+ {name: "500", value: 500}
+ ];
+ self.pager_values = ko.observableArray([]);
+ self.selection_enabled = false;
+ if (self.options.selection_enabled !== undefined)
+ {
+ self.selection_enabled = self.options.selection_enabled;
+ }
+
+ self.select_all_enabled = false;
+ if (self.options.select_all_enabled !== undefined)
+ {
+ self.select_all_enabled = self.options.select_all_enabled;
+ }
+ self.action_text = self.options.action_text || "Action";
+ self.on_resize = self.options.on_resize;
+ self.columns = self.options.columns || [new Octolapse.ListViewColumn('Name', 'name')];
+ self.action_class = self.options.action_class || 'list-item-action';
+ self.selection_class = self.options.selection_class || 'list-item-selection';
+ self.selection_header_class = self.options.selection_header_class || 'list-item-selection';
+ self.to_list_item = self.options.to_list_item || function(item) {
+ return new Octolapse.ListItemViewModel(self.data.parent, item.name, item.name, item.name, false, null);
+ };
+ self.no_items_template_id = self.options.no_items_template_id || "octolapse-list-no-items";
+ self.header_template_id = self.options.header_template_id || "octolapse-list-item-header";
+ self.list_item_template_id = self.options.list_item_template_id || "octolapse-list-item";
+ self.top_left_pagination_template_id = self.options.top_left_pagination_template_id || "octolapse-list-empty-template";
+ self.top_right_pagination_template_id = self.options.top_right_pagination_template_id || "octolapse-list-empty-template";
+ self.bottom_left_pagination_template_id = self.options.bottom_left_pagination_template_id || "octolapse-list-empty-template";
+ self.bottom_right_pagination_template_id = self.options.bottom_right_pagination_template_id || "octolapse-pagination-page-size";
+ self.select_header_template_id = self.options.select_header_template_id || "octolapse-list-select-header-checkbox-page-template";
+ self.custom_row_template_id = self.options.custom_row_template_id || null;
+ self.sort_column = ko.observable(self.options.sort_column || "name");
+ self.sort_direction_ascending = ko.observable((self.options.sort_direction || "ascending") === "ascending");
+ self.default_sort_direction_ascending = self.sort_direction_ascending();
+ self.not_loaded_template_id = options.not_loaded_template_id || "octolapse-list-not-loaded";
+ self.pagination_pages = self.options.pagination_pages || 11;
+ self.pagination_style = self.options.pagination_style || "normal";
+ self.pagination = self.options.pagination || "top-and-bottom";
+ self.pagination_top = self.pagination === 'top' || self.pagination === "top-and-bottom";
+ self.pagination_bottom = self.pagination === 'bottom' || self.pagination === "top-and-bottom";
+ self.pagination_row_auto_hide = self.options.pagination_row_auto_hide === undefined? true : self.options.pagination_row_auto_hide;
+
+ self.pagination_top_left_class = "span2";
+ self.pagination_top_center_class = "span8";
+ self.pagination_top_right_class = "span2";
+ self.pagination_bottom_left_class = "span2";
+ self.pagination_bottom_center_class = "span8";
+ self.pagination_bottom_right_class = "span2";
+
+ if (self.pagination_style === 'wide')
+ {
+ self.pagination_top_left_class = "span1";
+ self.pagination_top_center_class = "span10";
+ self.pagination_top_right_class = "span1";
+ self.pagination_bottom_left_class = "span1";
+ self.pagination_bottom_center_class = "span10";
+ self.pagination_bottom_right_class = "span1";
+ if (!self.options.pagination_pages)
+ self.pagination_pages = 13;
+ }
+ else if (self.pagination_style === "narrow")
+ {
+ self.pagination_top_left_class = "span3";
+ self.pagination_top_center_class = "span6";
+ self.pagination_top_right_class = "span3";
+ self.pagination_bottom_left_class = "span3";
+ self.pagination_bottom_center_class = "span6";
+ self.pagination_bottom_right_class = "span3";
+ if (!self.options.pagination_pages)
+ self.pagination_pages = 9;
+ }
+
+ self.show_pagination_row_top = ko.pureComputed(function(){
+ return self.pagination_top && (self.list_items().length > 0 || !self.pagination_row_auto_hide);
+ });
+
+ self.show_pagination_row_bottom = ko.pureComputed(function(){
+ return self.pagination_bottom && (self.list_items().length > 0 || !self.pagination_row_auto_hide);
+ });
+
+ self.resize = function(){
+ //console.log("octolapse.helpers.js - resize");
+ if (self.on_resize)
+ self.on_resize();
+ };
+ self.is_empty = ko.pureComputed(function(){
+ return self.list_items().length == 0;
+ });
+
+ self.all_selected.subscribe(function(value){
+ //console.log("octolapse.helpers.js - all selected");
+ self.select('all', value);
+ });
+
+ self.page_selected.subscribe(function(value){
+ //console.log("octolapse.helpers.js - page selected");
+ self.select('page', value);
+ });
+
+ self.page_size.octolapseSubscribeChanged(function (newValue, oldValue) {
+ //console.log("octolapse.helpers.js - page size changed");
+ var new_page = Math.floor(self.current_page_index()*oldValue/newValue);
+ self.current_page_index(new_page);
+ self.resize();
+ });
+
+ self.num_pages = ko.pureComputed(function(){
+ //console.log("octolapse.helpers.js - num pages changed");
+ if (self.list_items().length === 0)
+ return 0;
+ return Math.ceil(self.list_items().length / self.page_size());
+ });
+
+ self.pager = ko.pureComputed(function(){
+ //console.log("octolapse.helpers.js - pager changed");
+ if (self.pagination_pages < 6) {
+ console.error("The file browser pager must have at least 6 pages.");
+ return [];
+ }
+ // determine how many pager items will be in the array. Can be 0-self.num_pager_pages
+ var num_pages = self.num_pages();
+ if (num_pages < 1)
+ return [];
+ var pager_size = Math.min(self.pagination_pages, num_pages);
+ var midpoint = Math.floor((self.pagination_pages - 4)/2);
+ // If we have only one page, there is no need for a pager!
+
+ var pager_pages = new Array(pager_size);
+ // set the first and last page
+ pager_pages[0] = new Octolapse.PagerPageViewModel('link', 0);
+ pager_pages[pager_size-1] = new Octolapse.PagerPageViewModel('link', num_pages-1);
+ for (var index=1; index < pager_size-1; index++)
+ {
+ // There are four scenarios to handle:
+ if (num_pages <= self.pagination_pages)
+ {
+ // 1. There are up to pagination_pages pages. In that case just add the available indexes.
+ pager_pages[index] = new Octolapse.PagerPageViewModel('link', index);
+ }
+ else if (self.current_page_index() < self.pagination_pages - 3)
+ {
+ // 2. We are in the first pagination_pages - 2 page. In that case we want only one
+ // ellipsis right before the final page.
+ if (index < self.pagination_pages - 2)
+ {
+ pager_pages[index] = new Octolapse.PagerPageViewModel('link', index);
+ }
+ else
+ {
+ pager_pages[index] = new Octolapse.PagerPageViewModel('ellipsis');
+ }
+ }
+ else if (self.current_page_index() < num_pages - self.pagination_pages + 3)
+ {
+ // 3. We are in the last num_pages - (pagination_pages - 2) page. In that case we want only one
+ // ellipsis right after the first page.
+ if (index === 1 || index === self.pagination_pages - 2)
+ {
+ pager_pages[index] = new Octolapse.PagerPageViewModel('ellipsis');
+ }
+ else
+ {
+ pager_pages[index] = new Octolapse.PagerPageViewModel('link', self.current_page_index() - midpoint + index - 2 );
+ }
+ }
+ else
+ {
+ // 4. We are at the end of the list. In this case we want ellipsis after page 1 and before max_page
+ // ellipsis right after the first page.
+ if (index === 1)
+ {
+ pager_pages[index] = new Octolapse.PagerPageViewModel('ellipsis');
+ }
+ else
+ {
+
+ pager_pages[index] = new Octolapse.PagerPageViewModel('link', num_pages - (self.pagination_pages - index));
+ }
+ }
+ }
+ return pager_pages;
+ });
+
+ self.get_column = function(column_name){
+ for (var index=0; index < self.columns.length; index++)
+ {
+ var column = self.columns[index];
+ if (column.id === column_name)
+ return column;
+ }
+ };
+
+ self.sort_by_column = function(column){
+ if (!column.sortable)
+ return;
+
+ //console.log("octolapse.helpers.js - sorting by column:" + column.id);
+ var ascending = true;
+ if (column.id !== self.sort_column())
+ {
+ ascending = self.default_sort_direction_ascending;
+ }
+ else
+ {
+ ascending = !self.sort_direction_ascending();
+ }
+ self.sort_direction_ascending(ascending);
+ self.sort_column(column.id);
+ self.current_page_index(0);
+ };
+
+ self.get_current_page_indexes = function(){
+ //console.log("octolapse.helpers.js - current page indexes changed");
+ if (self.page_size() === 0 || self.list_items().length === 0)
+ return null;
+ var page_start_index = Math.max(self.current_page_index() * self.page_size(), 0);
+ var page_end_index = Math.min(page_start_index + self.page_size(), self.list_items().length);
+ return [page_start_index, page_end_index];
+ };
+
+ self.list_items_sorted = ko.pureComputed(function() {
+ //console.log("octolapse.helpers.js - list items sorting");
+ var current_sort_column = self.get_column(self.sort_column());
+ if (!current_sort_column)
+ return self.list_items();
+ var left_direction = self.sort_direction_ascending() ? -1 : 1;
+ var right_direction = left_direction * -1;
+ var sort_column_id = current_sort_column.sort_column_id;
+ return self.list_items().sort(
+ function (left, right) {
+ var leftItem = (left.value || {})[sort_column_id] || left[sort_column_id];
+ var rightItem = (right.value || {})[sort_column_id] || right[sort_column_id];
+ return leftItem === rightItem ? 0 : (leftItem < rightItem ? left_direction : right_direction);
+ });
+ });
+
+ self.current_page = ko.pureComputed(function(){
+ //console.log("octolapse.helpers.js - current page changing");
+ var page_indexes = self.get_current_page_indexes();
+ if (!page_indexes) {
+ return[];
+ }
+ return self.list_items_sorted().slice(page_indexes[0], page_indexes[1]);
+ });
+
+ //self.max_page = ko.pureComputed(function(){return Math.floor(self.list_items().length/self.page_size());});
+
+ self._fix_page_numbers = function() {
+ //console.log("octolapse.helpers.js - repairing page numbers");
+ // Ensure we are not off of any existing pages. This can happen during a reload, after a delete, or
+ // maybe some other scenarios.
+ // Make sure we haven't deleted ourselves off the the current page!
+ var cur_page = self.current_page_index();
+ var has_changed = false;
+ if (cur_page + 1 >= self.num_pages())
+ {
+ has_changed = true;
+ cur_page = self.num_pages() - 1;
+ }
+ if (cur_page < 0)
+ {
+ has_changed = true;
+ cur_page = 0;
+ }
+
+ if (has_changed)
+ self.current_page_index(cur_page);
+ };
+
+ self.set = function(items, on_added){
+ self.has_loaded(true);
+ var list_items = [];
+ for (var index = 0; index < items.length; index++)
+ {
+ var list_item = self.to_list_item(items[index]);
+ list_items.push(list_item);
+ if (on_added)
+ {
+ on_added(list_item);
+ }
+ }
+ self.list_items(list_items);
+ self._fix_page_numbers();
+ self.resize();
+ };
+
+ self.clear = function(){
+ self.list_items([]);
+ };
+
+ self.add = function(item){
+ self.has_loaded(true);
+ self.list_items.push(self.to_list_item(item));
+ };
+
+ self.get = function(id){
+ for (var index = 0; index < self.list_items().length; index++)
+ {
+ if (self.list_items()[index].id === id)
+ {
+ return self.list_items()[index];
+ }
+ }
+ return null;
+ };
+
+ self.get_index = function(id){
+ for (var index = 0; index < self.list_items().length; index++)
+ {
+ if (self.list_items()[index].id === id)
+ {
+ return index;
+ }
+ }
+ return -1;
+ };
+
+ self.remove = function(id){
+ var item = self.get(id);
+ if (item)
+ {
+ self.list_items.remove(item);
+ self._fix_page_numbers();
+ return item;
+ }
+ return null;
+ };
+
+ self.replace = function(item){
+ var list_item = self.to_list_item(item);
+ var index = self.get_index(list_item.id);
+ if (index > -1)
+ {
+ var old_item = self.list_items.splice(index, 1, list_item);
+ return old_item[0];
+ }
+ return null;
+ };
+
+ self.select = function(type, selection){
+ //console.log("octolapse.helpers.js - selecting " + type);
+ // force selection to true or false
+ selection = !!selection;
+ var page_indexes = null;
+ if (type === 'page')
+ {
+ page_indexes = self.get_current_page_indexes();
+ }
+ else if (type === 'all')
+ {
+ if (self.list_items().length > 0)
+ {
+ page_indexes = [0, self.list_items().length];
+ }
+ else {
+ return;
+ }
+ }
+
+ if (!page_indexes)
+ {
+ return;
+ }
+ var list_items_sorted = self.list_items_sorted();
+ for (var index=page_indexes[0]; index < page_indexes[1]; index++)
+ {
+ list_items_sorted[index].selected(selection);
+ }
+ };
+
+ self.goto_page = function(page_index){
+ var num_pages =self.num_pages();
+ if (page_index > num_pages - 1)
+ page_index = num_pages - 1;
+
+ if (page_index < 0)
+ page_index = 0;
+
+ self.current_page_index(page_index);
+ };
+
+ self.selected_count = ko.pureComputed(function(){
+ var selected_count = 0;
+ self.list_items().forEach(function(item, index){
+ if (item.selected()) {
+ selected_count++;
+ }
+ });
+ return selected_count;
+ });
+
+ self.selected = function(fields_to_return){
+ //console.log("octolapse.helpers.js - returning selected items.");
+ var selected_items = [];
+ for (var index=0; index < self.list_items().length; index++)
+ {
+ var item = self.list_items()[index];
+ if (item.selected()) {
+ if (fields_to_return)
+ {
+ var value = {};
+ fields_to_return.forEach(function(field, index){
+ var is_value_field = false;
+ var field_value = null;
+ if (item[field] === undefined)
+ {
+ is_value_field = true;
+ field_value = item.value[field];
+ }
+ else
+ {
+ field_value = item[field];
+ }
+ if (field_value && (ko.isObservable(field_value) || ko.isComputed(field_value)))
+ {
+ field_value = field_value();
+ }
+ if(is_value_field)
+ {
+ if (!value.value)
+ {
+ value.value = {};
+ }
+ value.value[field] = field_value;
+ }
+ else{
+ value[field] = field_value;
+ }
+
+ });
+ selected_items.push(value);
+ }
+ else
+ {
+ selected_items.push(item);
+ }
+ }
+ }
+ return selected_items;
+ };
+
+ };
+
+ Octolapse.PagerPageViewModel = function(type, index){
+ var self = this;
+ self.index = type === 'link'? index : -1;
+ self.name = type === 'link' ? (index+1).toString() : "";
+ self.type = type;
+ };
+
+});
diff --git a/octoprint_octolapse/static/js/octolapse.js b/octoprint_octolapse/static/js/octolapse.js
index e5472407..5f804680 100644
--- a/octoprint_octolapse/static/js/octolapse.js
+++ b/octoprint_octolapse/static/js/octolapse.js
@@ -1,7 +1,7 @@
/*
##################################################################################
# Octolapse - A plugin for OctoPrint used for making stabilized timelapse videos.
-# Copyright (C) 2017 Brad Hochgesang
+# Copyright (C) 2023 Brad Hochgesang
##################################################################################
# This program is free software: you can redistribute it and/or modify
# it under the terms of the GNU Affero General Public License as published
@@ -22,7 +22,11 @@
##################################################################################
*/
Octolapse = {};
-Octolapse.Printers = { 'current_profile_guid': function () {return null;}};
+Octolapse.Printers = {
+ 'current_profile_guid': function () {
+ return null;
+ }
+};
OctolapseViewModel = {};
//UI_API_KEY = "";
Octolapse.Help = null;
@@ -31,14 +35,12 @@ $(function () {
// Finds the first index of an array with the matching predicate
Octolapse.IsShowingSettingsChangedPopup = false;
- Octolapse.toggleContentFunction = function ($elm, options, updateObservable)
- {
+ Octolapse.toggleContentFunction = function ($elm, options, updateObservable) {
- if(options.toggle_observable){
+ if (options.toggle_observable) {
//console.log("Toggling element.");
- if(updateObservable) {
+ if (updateObservable) {
options.toggle_observable(!options.toggle_observable());
- //console.log("Observable updated - " + options.toggle_observable())
}
if (options.toggle_observable()) {
if (options.class_showing) {
@@ -49,25 +51,23 @@ $(function () {
$elm.children('[class^="icon-"]').removeClass(options.class_hiding);
$elm.children('[class^="fa"]').removeClass(options.class_hiding);
}
- if(options.container) {
+ if (options.container) {
if (options.parent) {
$elm.parents(options.parent).find(options.container).stop().slideDown('fast', options.onComplete);
} else {
$(options.container).stop().slideDown('fast', options.onComplete);
}
}
- }
- else
- {
- if (options.class_hiding) {
- $elm.children('[class^="icon-"]').addClass(options.class_hiding);
- $elm.children('[class^="fa"]').addClass(options.class_hiding);
- }
+ } else {
+ if (options.class_hiding) {
+ $elm.children('[class^="icon-"]').addClass(options.class_hiding);
+ $elm.children('[class^="fa"]').addClass(options.class_hiding);
+ }
if (options.class_showing) {
$elm.children('[class^="icon-"]').removeClass(options.class_showing);
$elm.children('[class^="fa"]').removeClass(options.class_showing);
}
- if(options.container) {
+ if (options.container) {
if (options.parent) {
$elm.parents(options.parent).find(options.container).stop().slideUp('fast', options.onComplete);
} else {
@@ -75,8 +75,7 @@ $(function () {
}
}
}
- }
- else {
+ } else {
if (options.class) {
$elm.children('[class^="icon-"]').toggleClass(options.class_hiding + ' ' + options.class_showing);
$elm.children('[class^="fa"]').toggleClass(options.class_hiding + ' ' + options.class_showing);
@@ -93,32 +92,32 @@ $(function () {
};
Octolapse.toggleContent = {
- init: function(element, valueAccessor) {
- var $elm = $(element),
- options = $.extend({
- class_showing: null,
- class_hiding: null,
- container: null,
- parent: null,
- toggle_observable: null,
- onComplete: function() {
- $(document).trigger("slideCompleted");
- }
- }, valueAccessor());
-
- if(options.toggle_observable) {
- Octolapse.toggleContentFunction($elm, options, false);
+ init: function (element, valueAccessor) {
+ var $elm = $(element),
+ options = $.extend({
+ class_showing: null,
+ class_hiding: null,
+ container: null,
+ parent: null,
+ toggle_observable: null,
+ onComplete: function () {
+ $(document).trigger("slideCompleted");
}
+ }, valueAccessor());
+ if (options.toggle_observable) {
+ Octolapse.toggleContentFunction($elm, options, false);
+ }
- $elm.on("click", function(e) {
- e.preventDefault();
- Octolapse.toggleContentFunction($elm,options, true);
- });
- }
- };
- ko.bindingHandlers.octolapseToggle = Octolapse.toggleContent ;
+ $elm.on("click", function (e) {
+ e.preventDefault();
+ Octolapse.toggleContentFunction($elm, options, true);
+
+ });
+ }
+ };
+ ko.bindingHandlers.octolapseToggle = Octolapse.toggleContent;
Octolapse.arrayFirstIndexOf = function (array, predicate, predicateOwner) {
for (var i = 0, j = array.length; i < j; i++) {
@@ -135,6 +134,7 @@ $(function () {
.toString(16)
.substring(1);
}
+
return s4() + s4() + '-' + s4() + '-' + s4() + '-' +
s4() + '-' + s4() + s4() + s4();
};
@@ -178,21 +178,22 @@ $(function () {
});
};
- Octolapse.progressBar = function (cancel_callback, initial_text)
- {
+ Octolapse.progressBar = function (cancel_callback, initial_text) {
var self = this;
self.notice = null;
self.$progress = null;
self.$progressText = null;
self.initial_text = initial_text;
- self.close = function()
- {
+ self.popup_margin = 15;
+ self.popup_width_with_margin = 400;
+ self.popup_width = self.popup_width_with_margin - self.popup_margin*2;
+
+ self.close = function () {
if (self.loader != null)
self.loader.remove();
};
- self.update = function(percent_complete, progress_text)
- {
+ self.update = function (percent_complete, progress_text) {
self.notice.find(".remove_button").remove();
if (self.$progress == null)
@@ -201,12 +202,13 @@ $(function () {
percent_complete = 0;
if (percent_complete > 100)
percent_complete = 100;
- if (percent_complete == 100) {
+ if (percent_complete === 100) {
//console.log("Received 100% complete progress message, removing progress bar.");
self.loader.remove();
- return null
+ return null;
}
- self.$progress.width(percent_complete + "%").attr("aria-valuenow", percent_complete).find("span").html(percent_complete + "%");
+ var percent_complete_text = percent_complete.toFixed(1);
+ self.$progress.width(percent_complete_text + "%").attr("aria-valuenow", percent_complete_text).find("span").html(percent_complete_text + "%");
self.$progressText.text(progress_text);
return self;
};
@@ -218,12 +220,13 @@ $(function () {
\
',
icon: 'fa fa-cog fa-spin',
+ width: self.popup_width.toString() + "px",
confirm: {
confirm: Octolapse.Globals.is_admin(),
buttons: [{
text: 'Cancel',
click: cancel_callback
- },{
+ }, {
text: 'Close',
addClass: 'remove_button',
click: cancel_callback
@@ -237,12 +240,12 @@ $(function () {
history: {
history: false
},
- before_open: function(notice) {
+ before_open: function (notice) {
self.notice = notice.get();
self.$progress = self.notice.find("div.progress-bar");
self.$progressText = self.notice.find("span.progress-text");
self.notice.find(".remove_button").remove();
- self.update(0,self.initial_text);
+ self.update(0, self.initial_text);
}
});
@@ -253,11 +256,11 @@ $(function () {
Octolapse.COOKIE_EXPIRE_DAYS = 30;
Octolapse.setLocalStorage = function (name, value) {
- localStorage.setItem("octolapse_"+name,value)
+ localStorage.setItem("octolapse_" + name, value);
};
Octolapse.getLocalStorage = function (name, value) {
- return localStorage.getItem("octolapse_"+name)
+ return localStorage.getItem("octolapse_" + name);
};
Octolapse.replaceAll = function (str, find, replace) {
@@ -268,13 +271,12 @@ $(function () {
new PNotify(options);
};
- // Create Helpers
- Octolapse.convertAxisSpeedUnit = function (speed, newUnit, previousUnit, tolerance, tolerance_unit){
+ // Create Helpers
+ Octolapse.convertAxisSpeedUnit = function (speed, newUnit, previousUnit, tolerance, tolerance_unit) {
if (speed == null)
return null;
- if(tolerance_unit !== newUnit)
- {
- switch (newUnit){
+ if (tolerance_unit !== newUnit) {
+ switch (newUnit) {
case "mm-min":
tolerance = tolerance * 60.0;
break;
@@ -283,14 +285,14 @@ $(function () {
break;
}
}
- if(newUnit === previousUnit)
+ if (newUnit === previousUnit)
return Octolapse.roundToIncrement(speed, tolerance);
- switch (newUnit){
+ switch (newUnit) {
case "mm-min":
- return Octolapse.roundToIncrement(speed*60.0, tolerance);
+ return Octolapse.roundToIncrement(speed * 60.0, tolerance);
case "mm-sec":
- return Octolapse.roundToIncrement(speed/60.0, tolerance);
+ return Octolapse.roundToIncrement(speed / 60.0, tolerance);
}
return null;
};
@@ -315,12 +317,12 @@ $(function () {
numDecimals = increment.toString().split(".")[1].length;
// tofixed can only support 20 decimals, reduce if necessary
- if(numDecimals > 20) {
+ if (numDecimals > 20) {
//console.log("Too much precision for tofixed:" + numDecimals + " - Reducing to 20");
numDecimals = 20;
}
// truncate value to numDecimals decimals
- value = parseFloat(value.toFixed(numDecimals).toString())
+ value = parseFloat(value.toFixed(numDecimals).toString());
return value;
};
@@ -328,34 +330,77 @@ $(function () {
Octolapse.Popups = {};
Octolapse.displayPopupForKey = function (options, popup_key, remove_keys) {
Octolapse.closePopupsForKeys(remove_keys);
- Octolapse.Popups[popup_key] = new PNotify(options);
+ var popup = new PNotify(options);
+ Octolapse.Popups[popup_key] = popup;
+ return popup;
};
- Octolapse.closePopupsForKeys = function(remove_keys) {
- if (!$.isArray(remove_keys))
- {
+ Octolapse.closePopupsForKeys = function (remove_keys) {
+ if (!$.isArray(remove_keys)) {
remove_keys = [remove_keys];
}
for (var index = 0; index < remove_keys.length; index++) {
var key = remove_keys[index];
if (key in Octolapse.Popups) {
-
- Octolapse.Popups[key].remove();
+ var notice = Octolapse.Popups[key];
+ if (notice.state === "opening") {
+ notice.options.animation = "none";
+ }
+ notice.remove();
delete Octolapse.Popups[key];
}
}
};
- Octolapse.removeKeyForClosedPopup = function(key){
- if (key in Octolapse.Popups) {
- delete Octolapse.Popups[key];
- }
+ Octolapse.removeKeyForClosedPopup = function (key) {
+ if (key in Octolapse.Popups) {
+ var notice = Octolapse.Popups[key];
+ delete Octolapse.Popups[key];
+ }
+ };
+
+ Octolapse.checkPNotifyDefaultConfirmButtons = function () {
+ // check to see if exactly two default pnotify confirm buttons exist.
+ // If we keep running into problems we might need to inspect the buttons to make sure they
+ // really are the defaults.
+ if (PNotify.prototype.options.confirm.buttons.length !== 2) {
+ // Someone removed the confirmation buttons, darnit! Report the error and re-add the buttons.
+ var message = "Octolapse detected the removal or addition of PNotify default confirmation buttons, " +
+ "which should not be done in a shared environment. Some plugins may show strange behavior. Please " +
+ "report this error at https://github.com/FormerLurker/Octolapse/issues. Octolapse will now clear " +
+ "and re-add the default PNotify buttons.";
+ console.error(message);
+
+ // Reset the buttons in case extra buttons were added.
+ PNotify.prototype.options.confirm.buttons = [];
+
+ var buttons = [
+ {
+ text: "Ok",
+ addClass: "",
+ promptTrigger: true,
+ click: function (b, a) {
+ b.remove();
+ b.get().trigger("pnotify.confirm", [b, a]);
+ }
+ },
+ {
+ text: "Cancel",
+ addClass: "",
+ promptTrigger: true,
+ click: function (b) {
+ b.remove();
+ b.get().trigger("pnotify.cancel", b);
+ }
+ }
+ ];
+ PNotify.prototype.options.confirm.buttons = buttons;
+ }
};
Octolapse.ConfirmDialogs = {};
- Octolapse.closeConfirmDialogsForKeys = function(remove_keys) {
- if (!$.isArray(remove_keys))
- {
+ Octolapse.closeConfirmDialogsForKeys = function (remove_keys) {
+ if (!$.isArray(remove_keys)) {
remove_keys = [remove_keys];
}
for (var index = 0; index < remove_keys.length; index++) {
@@ -366,40 +411,75 @@ $(function () {
delete Octolapse.ConfirmDialogs[key];
}
}
- }
- Octolapse.showConfirmDialog = function(key, title, text, onConfirm, onCancel, onComplete)
- {
+ };
+
+ Octolapse.showConfirmDialog = function (key, title, text, onConfirm, onCancel, onComplete, onOption, optionButtonText) {
Octolapse.closeConfirmDialogsForKeys([key]);
- Octolapse.ConfirmDialogs[key] = (
- new PNotify({
- title: title,
- text: text,
- icon: 'fa fa-question',
- hide: false,
- addclass: "octolapse",
- confirm: {
- confirm: true
+ // Make sure that the default pnotify buttons exist
+ Octolapse.checkPNotifyDefaultConfirmButtons();
+ options = {
+ title: title,
+ text: text,
+ icon: 'fa fa-question',
+ hide: false,
+ addclass: "octolapse",
+ confirm: {
+ confirm: true,
+ },
+ buttons: {
+ closer: false,
+ sticker: false
+ },
+ history: {
+ history: false
+ }
+ };
+ if (onOption && optionButtonText) {
+ var confirmButtons = [
+ {
+ text: "Ok",
+ addClass: "",
+ promptTrigger: true,
+ click: function (b, a) {
+ b.remove();
+ b.get().trigger("pnotify.confirm", [b, a]);
+ }
},
- buttons: {
- closer: false,
- sticker: false
+ {
+ text: optionButtonText,
+ click: function () {
+ if (onOption)
+ onOption();
+ if (onComplete)
+ onComplete();
+ Octolapse.closeConfirmDialogsForKeys([key]);
+ }
},
- history: {
- history: false
+ {
+ text: "Cancel",
+ addClass: "",
+ promptTrigger: true,
+ click: function (b) {
+ b.remove();
+ b.get().trigger("pnotify.cancel", b);
+ }
}
- })
- ).get().on('pnotify.confirm', function(){
- if(onConfirm)
+ ];
+ options.confirm.buttons = confirmButtons;
+ }
+ Octolapse.ConfirmDialogs[key] = (
+ new PNotify(options)
+ ).get().on('pnotify.confirm', function () {
+ if (onConfirm)
onConfirm();
- if(onComplete)
- {
+ if (onComplete) {
onComplete();
}
- }).on('pnotify.cancel', function() {
+ }).on('pnotify.cancel', function () {
if (onCancel)
onCancel();
- if(onComplete) {
- onComplete();
+ if (onComplete) {
+ onComplete();
}
});
};
@@ -435,12 +515,11 @@ $(function () {
}, "You must select a file.");
- $.validator.addMethod("check_one", function(value, elem, param)
- {
- //console.log("Validating trigger checks");
- $(param).val();
- return $(param + ":checkbox:checked").length > 0;
- }
+ $.validator.addMethod("check_one", function (value, elem, param) {
+ //console.log("Validating trigger checks");
+ $(param).val();
+ return $(param + ":checkbox:checked").length > 0;
+ }
);
// Add custom validator for csv floats
@@ -457,46 +536,45 @@ $(function () {
return /^-?\d+$/.test(value);
}, 'Please enter an integer value.');
- Octolapse.isPercent = function(value){
+ Octolapse.isPercent = function (value) {
//console.log("is percent - Octolapse")
- if(typeof value != 'string')
+ if (typeof value !== 'string')
return false;
if (!value)
return false;
value = value.trim();
- if(! (value.length > 1 && value[value.length-1] === "%"))
+ if (!(value.length > 1 && value[value.length - 1] === "%"))
return false;
- value = value.substr(0,value.length-1);
- return Octolapse.isFloat(value)
+ value = value.substr(0, value.length - 1);
+ return Octolapse.isFloat(value);
};
- Octolapse.isFloat = function(value){
+ Octolapse.isFloat = function (value) {
if (!value)
return false;
- return !isNaN(value) && !isNaN(parseFloat(value))
+ return !isNaN(value) && !isNaN(parseFloat(value));
};
- Octolapse.parseFloat = function(value){
+ Octolapse.parseFloat = function (value) {
var ret = parseFloat(value);
- if(!isNaN(ret))
+ if (!isNaN(ret))
return ret;
return null;
};
- Octolapse.parsePercent = function(value){
+ Octolapse.parsePercent = function (value) {
value = value.trim();
- if(value.length > 1 && value[value.length-1] === "%")
- value = value.substr(0,value.length-1);
+ if (value.length > 1 && value[value.length - 1] === "%")
+ value = value.substr(0, value.length - 1);
else
return null;
- return Octolapse.parseFloat(value)
- }
+ return Octolapse.parseFloat(value);
+ };
$.validator.addMethod('slic3rPEFloatOrPercent',
function (value) {
if (!value)
return true;
- if(!Octolapse.isPercent(value) && !Octolapse.isFloat(value))
- {
+ if (!Octolapse.isPercent(value) && !Octolapse.isFloat(value)) {
return false;
}
return true;
@@ -506,14 +584,14 @@ $(function () {
function (value) {
if (!value)
return true;
- if(Octolapse.isPercent(value))
+ if (Octolapse.isPercent(value))
value = Octolapse.parsePercent(value);
- else if(Octolapse.isFloat(value))
+ else if (Octolapse.isFloat(value))
value = Octolapse.parseFloat(value);
var rounded_value = Octolapse.roundToIncrement(value, 0.0001);
- if (rounded_value == value)
+ if (rounded_value === value)
return true;
- return false
+ return false;
}, 'Please enter a multiple of 0.0001.');
@@ -523,7 +601,7 @@ $(function () {
try {
var r = /^\d+$/.test(value); // Check the number against a regex to ensure it contains only digits.
var n = +value; // Try to convert to number.
- return r && !isNaN(n) && n > 0 && n % 1 == 0;
+ return r && !isNaN(n) && n > 0 && n % 1 === 0;
} catch (e) {
return false;
}
@@ -578,15 +656,14 @@ $(function () {
function (value, element, param) {
//console.log("ifCheckedEnsureNonNull");
if (value === "on")
- for (var index = 0; index < param.length; index++)
- {
+ for (var index = 0; index < param.length; index++) {
// Get the target selector
var $target = $(param[index]);
// If we found no target return false
if ($target.length === 0)
return false;
- var value = $target.val()
- if (value == null || value == '')
+ var targetVal = $target.val();
+ if (targetVal == null || targetVal === '')
return false;
}
return true;
@@ -597,9 +674,9 @@ $(function () {
$.validator.addMethod('ifOtherCheckedEnsureNonNull',
function (value, element, param) {
// see if the target is checked
- var target_checked = $(param + ":checkbox:checked").length > 0
+ var target_checked = $(param + ":checkbox:checked").length > 0;
if (target_checked)
- return value != null && value != '';
+ return value != null && value !== '';
return true;
});
@@ -607,8 +684,8 @@ $(function () {
function (value, element) {
var testUrl = value.toUpperCase().replace("{CAMERA_ADDRESS}", 'http://w.com/');
var is_valid = (
- jQuery.validator.methods.url.call(this, testUrl, element) ||
- jQuery.validator.methods.url.call(this, "http://w.com" + testUrl, element)
+ $.validator.methods.url.call(this, testUrl, element) ||
+ $.validator.methods.url.call(this, "http://w.com" + testUrl, element)
);
return is_valid;
});
@@ -617,15 +694,15 @@ $(function () {
function (value, element) {
var testUrl = value.toUpperCase().replace("{CAMERA_ADDRESS}", 'http://w.com/').replace("{value}", "1");
var is_valid = (
- jQuery.validator.methods.url.call(this, testUrl, element) ||
- jQuery.validator.methods.url.call(this, "http://w.com" + testUrl, element)
+ $.validator.methods.url.call(this, testUrl, element) ||
+ $.validator.methods.url.call(this, "http://w.com" + testUrl, element)
);
return is_valid;
});
$.validator.addMethod('octolapseRenderingTemplate',
function (value, element) {
- var data = {"rendering_template":value};
+ var data = { "rendering_template": value };
$.ajax({
url: "./plugin/octolapse/validateRenderingTemplate",
type: "POST",
@@ -635,7 +712,7 @@ $(function () {
contentType: "application/json",
dataType: "json",
success: function (result) {
- if(result.success)
+ if (result.success)
return true;
return false;
},
@@ -643,15 +720,15 @@ $(function () {
var message = "Octolapse could not validate the rendering template.";
var options = {
- title: 'Rendering Template Error',
- text: message,
- type: 'error',
- hide: false,
- addclass: "octolapse",
- desktop: {
- desktop: true
- }
- };
+ title: 'Rendering Template Error',
+ text: message,
+ type: 'error',
+ hide: false,
+ addclass: "octolapse",
+ desktop: {
+ desktop: false
+ }
+ };
Octolapse.displayPopup(options);
return false;
}
@@ -659,18 +736,32 @@ $(function () {
});
- jQuery.extend(jQuery.validator.messages, {
+ $.validator.addMethod('octolapsePrinterSnapshotCommand', function (value, element, param) {
+ if (value === "")
+ return true;
+ var data = { "snapshot_command": value };
+ var rpcParam = {
+ url: "./plugin/octolapse/validateSnapshotCommand",
+ type: "POST",
+ data: JSON.stringify(data),
+ dataType: "json",
+ contentType: "application/json",
+ };
+ return $.validator.methods.remote.call(this, value, element, rpcParam, 'octolapsePrinterSnapshotCommand');
+ }, "Must be empty, or must contain at least one non-whitespace character that is not part of a gcode comment.");
+
+ jQuery.extend($.validator.messages, {
name: "Please enter a name.",
required: "This field is required.",
url: "Please enter a valid URL.",
number: "Please enter a valid number.",
equalTo: "Please enter the same value again.",
- maxlength: jQuery.validator.format("Please enter no more than {0} characters."),
- minlength: jQuery.validator.format("Please enter at least {0} characters."),
- rangelength: jQuery.validator.format("Please enter a value between {0} and {1} characters long."),
- range: jQuery.validator.format("Please enter a value between {0} and {1}."),
- max: jQuery.validator.format("Please enter a value less than or equal to {0}."),
- min: jQuery.validator.format("Please enter a value greater than or equal to {0}."),
+ maxlength: $.validator.format("Please enter no more than {0} characters."),
+ minlength: $.validator.format("Please enter at least {0} characters."),
+ rangelength: $.validator.format("Please enter a value between {0} and {1} characters long."),
+ range: $.validator.format("Please enter a value between {0} and {1}."),
+ max: $.validator.format("Please enter a value less than or equal to {0}."),
+ min: $.validator.format("Please enter a value greater than or equal to {0}."),
octolapseCameraRequestTemplate: "The value is not a url. You may use {camera_address} or {value} tokens.",
octolapseSnapshotTemplate: "The value is not a url. You may use {camera_address} to refer to the web camera address."
});
@@ -688,178 +779,173 @@ $(function () {
return null;
// Check to see if it is a percent
- var is_percent = Octolapse.isPercent(val)
- if(is_percent)
- {
- if(round_to_percent)
- {
+ var is_percent = Octolapse.isPercent(val);
+ if (is_percent) {
+ if (round_to_percent) {
val = Octolapse.parsePercent(val);
- }
- else
+ } else
return null;
- }
- else
+ } else
val = Octolapse.parseFloat(val);
if (val == null || isNaN(val))
return null;
- try{
+ try {
var round_to_increment = round_to_increment_mm_min;
if (is_percent) {
- round_to_increment = round_to_percent
- }
- else if (current_units_observable() === 'mm-sec') {
+ round_to_increment = round_to_percent;
+ } else if (current_units_observable() === 'mm-sec') {
round_to_increment = round_to_increment_mm_sec;
}
var rounded = Octolapse.roundToIncrement(val, round_to_increment);
- if(is_percent && return_text)
+ if (is_percent && return_text)
return rounded.toString() + "%";
else if (return_text)
return rounded.toString();
return rounded;
- }
- catch (e){
- console.log("Error rounding axis_speed_unit");
+ } catch (e) {
+ console.error("Error rounding axis_speed_unit");
}
};
+ Octolapse.streamLoading = {};
+ Octolapse.streamLoading.on_error = function (e) {
+ var element = e.target;
+ var options = e.data.options;
+ $(element).hide();
+ $(options.loading_selector).hide();
+ if (options.src !== "") {
+ console.error("Stream Error.");
+ $(options.error_selector).html("").fadeIn(1000);
+ } else {
+ // This should not happen!
+ console.error("Stream Error, but src is empty.");
+ $(options.error_selector).html("").fadeIn(1000);
+ }
+ };
+ Octolapse.streamLoading.on_loaded = function (e) {
+ var element = e.target;
+ var options = e.data.options;
+
+ if (options.src === "") {
+ // If the src is empty, that means we have closed the stream, or we have no stream src.
+ // When we close the stream we set it to an empty image to prevent the error
+ // handler from being called. However, assume this is an error.
+ //console.log("Stream closed, or we have no stream address.");
+ $(options.loading_selector).hide();
+ $(element).hide();
+ $(options.error_selector).html("").fadeIn(1000);
+ return;
+ }
+ // If we are here, we have a valid stream that is loaded.
+ var max_height = options.max_height || 333;
+ var max_width = options.max_width || 588;
+ $(element).width('auto').height('auto');
+ //console.log("Stream Loaded.");
+ // get the width and height of the stream element
+ var stream_width = $(element).width();
+ var stream_height = $(element).height();
+ // See if the image is greater than the max
+ if (stream_width > max_width || stream_height > max_height) {
+ //console.log("Resizing Stream.");
+ var ratioX = max_width / stream_width;
+ var ratioY = max_height / stream_height;
+ var ratio = Math.min(ratioX, ratioY);
+ var newWidth = stream_width * ratio;
+ var newHeight = stream_height * ratio;
+
+ $(element).width(newWidth).height(newHeight);
+ }
+ $(options.error_selector).hide();
+ $(options.loading_selector).hide();
+ $(element).show();
+ //console.log("Stream shown.");
+ };
ko.bindingHandlers.streamLoading = {
- init: function(element, valueAccessor) {
+ update: function (element, valueAccessor) {
- },update: function(element, valueAccessor) {
// close the stream if one exists
- $(element).attr('src', "");
- console.log("Binding element to streamLoading");
- var self = this;
var options = valueAccessor();
- self.max_height = ko.unwrap(options.max_height) || 333;
- self.max_width = ko.unwrap(options.max_width) || 588;
- self.src = ko.unwrap(options.src);
- var error_selector = ko.unwrap(options.error_selector);
- var loading_selector = ko.unwrap(options.loading_selector);
+ var current_src = $(element).attr('src');
+ var new_src = options.src;
+ if (options.src === "")
+ new_src = "data:image/gif;base64,R0lGODlhAQABAAD/ACwAAAAAAQABAAACADs=";
+ //console.log("Camera stream is updating from old_src: " + current_src + " to new src: " + new_src + " for id: ??.");
+ $(element).unbind("load").one("load", { options: options }, Octolapse.streamLoading.on_loaded);
+ $(element).unbind("error").one("error", { options: options }, Octolapse.streamLoading.on_error);
+ $(options.loading_selector).html("").show();
$(element).hide();
- $(error_selector).hide();
- $(loading_selector).html("").show();
- $(element).unbind('load').unbind('error');
-
- // Create a handler to handle load and error
- self.on_loaded = function(){
- $(element).width('auto').height('auto');
- console.log("Stream Loaded.");
- // get the width and height of the stream element
- var stream_width = $(element).width();
- var stream_height = $(element).height();
- // See if the image is greater than the max
- if (stream_width > self.max_width || stream_height > self.max_height)
- {
- console.log("Resizing Stream.");
- var ratioX = self.max_width / stream_width;
- var ratioY = self.max_height / stream_height;
- var ratio = Math.min(ratioX, ratioY);
- var newWidth = stream_width * ratio;
- var newHeight = stream_height * ratio;
-
- $(element).width(newWidth).height(newHeight);
- }
- $(error_selector).hide();
- $(loading_selector).hide();
- $(element).show();
- };
-
- $(element).off('load', self.on_loaded);
- $(element).one('load', self.on_loaded);
-
- self.on_error = function(){
- $(element).hide();
- $(loading_selector).hide();
- if (src !== "") {
- console.log("Stream Error.");
- $(error_selector).html("").fadeIn(1000);
- }
- else{
- console.log("Stream Closing.");
- $(error_selector).html("").fadeIn(1000);
- }
- };
- $(element).off('error', self.on_error);
- $(element).one('error', self.on_error);
- // set the source for the stream
- $(element).attr('src', self.src);
+ $(options.error_selector).hide();
+ $(element).attr('src', new_src);
+ //console.log("Finished updating camera stream.");
+
}
};
ko.bindingHandlers.octolapseSliderValue = {
- // Init, runs on initialization
- init: function (element, valueAccessor, allBindings, viewModel, bindingContext) {
- if ( ko.isObservable(valueAccessor()) && (element instanceof HTMLInputElement) && (element.type === "range") )
- {
- // Add event listener to the slider, this will update the observable on input (just moving the slider),
- // Otherwise, you have to move the slider then release it for the value to change
- element.addEventListener('input', function(){
- // Update the observable
- if (ko.unwrap(valueAccessor()) != element.value)
- {
- valueAccessor()(element.value);
-
- // Trigger the change event, awesome fix that makes
- // changing a dropdown and a range slider function the same way
- element.dispatchEvent(new Event('change'));
- }
- }); // End event listener
+ // Init, runs on initialization
+ init: function (element, valueAccessor, allBindings, viewModel, bindingContext) {
+ if (ko.isObservable(valueAccessor()) && (element instanceof HTMLInputElement) && (element.type === "range")) {
+ // Add event listener to the slider, this will update the observable on input (just moving the slider),
+ // Otherwise, you have to move the slider then release it for the value to change
+ element.addEventListener('input', function () {
+ // Update the observable
+ if (ko.unwrap(valueAccessor()) !== element.value) {
+ valueAccessor()(element.value);
+
+ // Trigger the change event, awesome fix that makes
+ // changing a dropdown and a range slider function the same way
+ element.dispatchEvent(new Event('change'));
+ }
+ }); // End event listener
}
- }, // End init
- // Update, runs whenever observables for this binding change(and on initialization)
- update: function (element, valueAccessor, allBindings, viewModel, bindingContext) {
+ }, // End init
+ // Update, runs whenever observables for this binding change(and on initialization)
+ update: function (element, valueAccessor, allBindings, viewModel, bindingContext) {
// Make sure the parameter passed is an observable
- if ( ko.isObservable(valueAccessor()) && (element instanceof HTMLInputElement) && (element.type === "range") )
- {
- // Update the slider value (so if the value changes programatically, the slider will update)
- if (element.value != ko.unwrap(valueAccessor()))
- {
- element.value = ko.unwrap(valueAccessor());
- element.dispatchEvent(new Event('input'));
- }
+ if (ko.isObservable(valueAccessor()) && (element instanceof HTMLInputElement) && (element.type === "range")) {
+ // Update the slider value (so if the value changes programatically, the slider will update)
+ if (element.value !== ko.unwrap(valueAccessor())) {
+ element.value = ko.unwrap(valueAccessor());
+ element.dispatchEvent(new Event('input'));
+ }
}
- } // End update
- }; // End octolapseSliderValue
+ } // End update
+ }; // End octolapseSliderValue
// Got this cool snippit from the knockoutjs.com site!
// I added some jquery to disable elements so that no clicking can be done during the fade out
ko.bindingHandlers.slideVisible = {
- init: function(element, valueAccessor) {
+ init: function (element, valueAccessor) {
// Initially set the element to be instantly visible/hidden depending on the value
var value = valueAccessor();
$(element).toggle(ko.unwrap(value)); // Use "unwrapObservable" so we can handle values that may or may not be observable
},
- update: function(element, valueAccessor) {
+ update: function (element, valueAccessor) {
// Whenever the value subsequently changes, slowly fade the element in or out
var value = valueAccessor();
- if(ko.unwrap(value))
- {
+ if (ko.unwrap(value)) {
$(element).find(".ignore_hidden_errors").removeClass("hiding");
- $(element).removeClass("octolapse_unclickable").stop( true, true ).slideDown();
- }
- else
- {
+ $(element).removeClass("octolapse_unclickable").stop(true, true).slideDown();
+ } else {
$(element).find(".ignore_hidden_errors").addClass("hiding");
- $(element).addClass("octolapse_unclickable").stop( true, true ).slideUp();
+ $(element).addClass("octolapse_unclickable").stop(true, true).slideUp();
}
}
};
- /* Might need this. Is an interesting extension
- ko.subscribable.fn.subscribeChanged = function (callback) {
- var savedValue = this.peek();
- return this.subscribe(function (latestValue) {
- var oldValue = savedValue;
- savedValue = latestValue;
- callback(latestValue, oldValue);
- });
- };
- */
- ko.extenders.confirmable = function(target, options) {
+ ko.subscribable.fn.octolapseSubscribeChanged = function (callback) {
+ var savedValue = this.peek();
+ return this.subscribe(function (latestValue) {
+ var oldValue = savedValue;
+ savedValue = latestValue;
+ callback(latestValue, oldValue);
+ });
+ };
+
+ ko.extenders.confirmable = function (target, options) {
var self = this;
self.message = "Are you sure?";
self.title = "Confirm";
@@ -879,75 +965,72 @@ $(function () {
self.current_value = null;
self.is_ignored = null;
self.is_confirmed = null;
- self.get_options = function(options){
+ self.get_options = function (options) {
if (!options)
return;
- if(options.message)
+ if (options.message)
self.message = options.message;
- if(options.title)
+ if (options.title)
self.title = options.title;
- if(options.key)
+ if (options.key)
self.dialog_key = options.key;
- if(options.on_before_changed)
+ if (options.on_before_changed)
self.on_before_changed_callback = options.on_before_changed;
- if(options.on_before_confirm)
+ if (options.on_before_confirm)
self.before_confirm_callback = options.on_before_confirm;
- if(options.on_cancel)
+ if (options.on_cancel)
self.cancel_callback = options.on_cancel;
- if(options.on_confirmed)
+ if (options.on_confirmed)
self.confirmed_callbacked = options.on_confirmed;
- if(options.on_complete)
+ if (options.on_complete)
self.complete_callback = options.on_complete;
- if(options.ignore)
+ if (options.ignore)
self.ignore_callback = options.ignore;
- if(options.auto_confirm)
+ if (options.auto_confirm)
self.auto_confirm_callback = options.auto_confirm;
};
self.get_options(options);
- self.on_before_changed = function(){
- if (self.on_before_changed_callback){
+ self.on_before_changed = function () {
+ if (self.on_before_changed_callback) {
self.on_before_changed_callback(self.new_value, self.current_value);
}
};
- self.on_before_confirm = function(){
- if(self.before_confirm_callback)
- {
+ self.on_before_confirm = function () {
+ if (self.before_confirm_callback) {
options = self.before_confirm_callback(self.new_value, self.current_value);
- if (options)
- {
+ if (options) {
self.get_options(options);
}
}
};
- self.on_cancel = function() {
- if(self.cancel_callback)
+ self.on_cancel = function () {
+ if (self.cancel_callback)
self.cancel_callback(self.new_value, self.current_value);
};
- self.on_confirmed = function() {
- if(self.confirmed_callbacked)
- self.confirmed_callbacked(self.new_value, self.current_value);
+ self.on_confirmed = function () {
+ if (self.confirmed_callbacked)
+ self.confirmed_callbacked(self.new_value, self.current_value);
};
- self.on_complete = function() {
- if(self.complete_callback)
+ self.on_complete = function () {
+ if (self.complete_callback)
self.complete_callback(self.new_value, self.current_value, self.is_confirmed, self.is_ignored);
};
var result = ko.computed({
read: target, //always return the original observables value
- write: function(new_value) {
+ write: function (new_value) {
self.is_confirmed = false;
self.new_value = new_value;
self.current_value = target();
self.on_before_changed();
self.is_ignored = self.ignore_callback && self.ignore_callback(new_value, self.current_value);
- if(!is_ignored)
- {
+ if (!is_ignored) {
var auto_confirm = (
self.auto_confirm_callback &&
self.auto_confirm_callback(new_value, self.current_value)
@@ -957,15 +1040,14 @@ $(function () {
target(new_value);
self.is_confirmed = true;
self.on_complete();
- }
- else {
+ } else {
self.on_before_confirm();
var current_value = target();
Octolapse.showConfirmDialog(
self.dialog_key,
self.title,
self.message,
- function() {
+ function () {
self.on_confirmed();
target(new_value);
self.is_confirmed = true;
@@ -978,8 +1060,7 @@ $(function () {
);
}
- }
- else {
+ } else {
target(new_value);
}
@@ -1044,17 +1125,16 @@ $(function () {
var result = ko.dependentObservable({
read: function () {
var val = target();
- val = Octolapse.parseFloat(val)
+ val = Octolapse.parseFloat(val);
if (val == null)
return val;
- try{
+ try {
// safari doesn't seem to like toFixed with a precision > 20
- if(precision > 20)
+ if (precision > 20)
precision = 20;
return val.toFixed(precision);
- }
- catch (e){
- console.log("Error converting toFixed");
+ } catch (e) {
+ console.error("Error converting toFixed");
}
},
@@ -1065,40 +1145,64 @@ $(function () {
return result;
};
- Octolapse.pad = function pad(n, width, z)
- {
+ var byte = 1024;
+ Octolapse.toFileSizeString = function (bytes, precision) {
+ precision = precision || 0;
+
+ if (Math.abs(bytes) < byte) {
+ return bytes + ' B';
+ }
+ var units = ['kB', 'MB', 'GB', 'TB', 'PB', 'EB', 'ZB', 'YB'];
+ var u = -1;
+ do {
+ bytes /= byte;
+ ++u;
+ } while (Math.abs(bytes) >= byte && u < units.length - 1);
+ return bytes.toFixed(precision) + ' ' + units[u];
+ };
+
+ Octolapse.pad = function pad(n, width, z) {
z = z || '0';
- return (String(z).repeat(width) + String(n)).slice(String(n).length)
- }
+ return (String(z).repeat(width) + String(n)).slice(String(n).length);
+ };
+
+ Octolapse.toLocalDateString = function (unix_timestamp) {
+ if (unix_timestamp) {
+ return (new Date(unix_timestamp * 1000)).toLocaleDateString();
+ }
+ return "UNKNOWN";
+ };
+
+ Octolapse.toLocalDateTimeString = function (unix_timestamp) {
+ if (unix_timestamp) {
+ var date = new Date(unix_timestamp * 1000);
+ return date.toLocaleDateString() + ' ' + date.toLocaleTimeString([], { hour: '2-digit', minute: '2-digit' });
+ }
+ return "UNKNOWN";
+ };
- /**
- * @return {string}
- */
Octolapse.ToTime = function (seconds) {
if (seconds == null)
return Octolapse.NullTimeText;
var utcSeconds = seconds;
var d = new Date(0); // The 0 there is the key, which sets the date to the epoch
d.setUTCSeconds(utcSeconds);
- return Octolapse.pad(d.getHours(),2,"0") + ":"
- + Octolapse.pad(d.getMinutes(),2,"0") + ":"
- + Octolapse.pad(d.getSeconds(),2,"0");
+ return Octolapse.pad(d.getHours(), 2, "0") + ":"
+ + Octolapse.pad(d.getMinutes(), 2, "0") + ":"
+ + Octolapse.pad(d.getSeconds(), 2, "0");
};
- /**
- * @return {string}
- */
Octolapse.ToTimer = function (seconds) {
if (seconds == null)
return "";
if (seconds <= 0)
return "0:00";
- seconds = Math.round(seconds)
+ seconds = Math.round(seconds);
var hours = Math.floor(seconds / 3600).toString();
if (hours > 0) {
- return ("" + hours).slice(-2) + " Hrs"
+ return ("" + hours).slice(-2) + " Hrs";
}
seconds %= 3600;
@@ -1116,7 +1220,9 @@ $(function () {
for (var precision = 2; precision >= 1; precision--) {
shortValue = parseFloat((suffixNum !== 0 ? (value / Math.pow(1000, suffixNum)) : value).toPrecision(precision));
var dotLessShortValue = (shortValue + '').replace(/[^a-zA-Z 0-9]+/g, '');
- if (dotLessShortValue.length <= 2) { break; }
+ if (dotLessShortValue.length <= 2) {
+ break;
+ }
}
if (shortValue % 1 !== 0) shortValue = shortValue.toFixed(1);
@@ -1131,7 +1237,7 @@ $(function () {
var result = ko.dependentObservable({
read: function () {
val = target();
- return Octolapse.ToTime(val)
+ return Octolapse.ToTime(val);
},
write: target
});
@@ -1140,31 +1246,117 @@ $(function () {
return result;
};
+ Octolapse.createObjectURL = window.webkitURL ? window.webkitURL.createObjectURL : window.URL && window.URL.createObjectURL ? window.URL.createObjectURL : null;
+ Octolapse.revokeObjectURL = window.webkitURL ? window.webkitURL.revokeObjectURL : window.URL && window.URL.revokeObjectURL ? window.URL.revokeObjectURL : null;
+
+ Octolapse.download = function (url, event, options) {
+ var on_start = options.on_start;
+ var on_load = options.on_load;
+ var on_error = options.on_error;
+ var on_abort = options.on_abort;
+ var on_progress = options.on_progress;
+ var on_end = options.on_end;
+
+ if (on_start) {
+ // If we can't download in the preferred way, make sure to report that to on_start
+ on_start(Octolapse.createObjectURL != null, event, url);
+ }
+
+ if (!(Octolapse.createObjectURL && Octolapse.revokeObjectURL)) {
+ // Fallback Download
+ var a = document.createElement('a');
+ a.href = url;
+ a.download = "";
+ a.click();
+ if (on_end) {
+ on_end(event, url);
+ }
+ return;
+ }
+
+ var request = new XMLHttpRequest();
+ request.responseType = 'blob';
+ request.open('GET', url);
+ request.addEventListener('load', function (e) {
+ var contentDispo = this.getResponseHeader('Content-Disposition');
+ var filename = "";
+ if (e.target.status === 200) {
+ if (contentDispo) {
+ // https://stackoverflow.com/a/23054920/
+ filename = contentDispo.match(/filename[^;=\n]*=((['"]).*?\2|[^;\n]*)/)[1].replace(/['"]/g, '');
+ }
+ var file_href = Octolapse.createObjectURL(e.target.response);
+ var a = document.createElement('a');
+ a.href = file_href;
+ a.download = filename;
+ a.click();
+ Octolapse.revokeObjectURL(file_href);
+ if (on_load) {
+ on_load(e, filename);
+ }
+ } else {
+ if (on_error) {
+ var error_message = e.target.status.toString() + " (" + e.target.statusText + ")";
+ var console_error_message = "Unable to download an octolapse file from '" + url + "': " +
+ error_message;
+ console.error(console_error_message);
+ on_error(error_message, null, null, null, null);
+ }
+ }
+
+ if (on_end) {
+ on_end(event, url);
+ }
+ });
+ request.addEventListener('error', function (
+ message, source, lineno, colno, error
+ ) {
+ console.error("Unable to download a file from '" + url + "'. Error Details: " + (
+ message ? message.toString() : "unknown"
+ ));
+ if (on_error) {
+ on_error(message, source, lineno, colno, error);
+ }
+ if (on_end) {
+ on_end(event, url);
+ }
+ });
+ request.addEventListener('abort', function (e) {
+ if (on_abort) {
+ on_abort(e);
+ }
+ if (on_end) {
+ on_end(event, url);
+ }
+ });
+ request.addEventListener('progress', function (e) {
+ if (on_progress) {
+ on_progress(e);
+ }
+ });
+ request.send();
+ };
+
OctolapseViewModel = function (parameters) {
var self = this;
Octolapse.Globals = self;
-
+ Octolapse.Help = new OctolapseHelp();
self.loginState = parameters[0];
Octolapse.PrinterStatus = parameters[1];
- self.OctoprintTimelapse = parameters[2]
- // Global Values
- self.show_printer_state_changes = ko.observable(false);
- self.show_position_changes = ko.observable(false);
- self.show_extruder_state_changes = ko.observable(false);
- self.show_trigger_state_changes = ko.observable(false);
- self.show_snapshot_plan_information = ko.observable(false);
- self.preview_snapshot_plans = ko.observable(false);
- self.automatic_updates_enabled = ko.observable(true);
- self.automatic_update_interval_days = ko.observable(7);
- self.auto_reload_latest_snapshot = ko.observable(false);
- self.auto_reload_frames = ko.observable(5);
+ self.OctoprintTimelapse = parameters[2];
+ // Main settings
+ self.main_settings = new Octolapse.MainSettingsViewModel();
+ self.version_text = ko.pureComputed(function () {
+ if (self.main_settings.octolapse_version() && self.main_settings.octolapse_version !== "unknown") {
+ return "v" + self.main_settings.octolapse_version();
+ }
+ return "unknown";
+ });
self.is_admin = ko.observable(false);
- self.enabled = ko.observable(false);
- self.navbar_enabled = ko.observable(false);
- self.show_navbar_when_not_printing = ko.observable(false);
- self.cancel_print_on_startup_error = ko.observable(true);
+ self.toggleAdmin = function () {
+ self.is_admin(!self.is_admin());
+ };
self.preprocessing_job_guid = "";
- self.version = ko.observable("unknown");
// Create a guid to uniquely identify this client.
self.client_id = Octolapse.guid();
// Have we loaded the state yet?
@@ -1174,6 +1366,7 @@ $(function () {
self.onBeforeBinding = function () {
self.is_admin(self.loginState.isAdmin());
+
};
self.startup_complete = false;
@@ -1182,23 +1375,32 @@ $(function () {
//console.log("Startup Complete")
self.getInitialState();
self.startup_complete = true;
- Octolapse.Help = new OctolapseHelp();
+
+
};
self.onDataUpdaterReconnect = function () {
//console.log("Reconnected Client")
self.getInitialState();
-
};
- self.getInitialState = function() {
+ self.getInitialState = function () {
//console.log("Getting initial state");
- if (!self.startup_complete && self.is_admin()) {
- //console.log("octolapse.js - Loading settings for current user after startup.");
- Octolapse.Settings.loadSettings();
- } else
- {
- self.loadState();
+ if (self.is_admin()) {
+ //console.log("octolapse.js - Loading settings for admin current user after startup.");
+ Octolapse.Settings.loadSettings(function () {
+ // Settings are loaded, show the UI
+ self.has_loaded_state(true);
+ // Check for updates
+ Octolapse.Settings.checkForProfileUpdates(true);
+ Octolapse.Status.load_files();
+ });
+ } else {
+ self.loadState(function () {
+ //console.log("octolapse.js - Loading state for non-admin user after startup.");
+ // Settings are loaded, show the UI
+ self.has_loaded_state(true);
+ });
}
// reset snapshot error state
@@ -1207,7 +1409,7 @@ $(function () {
};
- self.loadState = function () {
+ self.loadState = function (success_callback) {
//console.log("octolapse.js - Loading State");
$.ajax({
url: "./plugin/octolapse/loadState",
@@ -1217,8 +1419,12 @@ $(function () {
contentType: "application/json",
dataType: "json",
success: function (result) {
- //console.log("The state has been loaded. Waiting for message");
+ //console.log("The state has been loaded.");
self.initial_state_loaded = true;
+ self.updateState(result);
+ if (success_callback) {
+ success_callback();
+ }
},
error: function (XMLHttpRequest, textStatus, errorThrown) {
@@ -1231,12 +1437,12 @@ $(function () {
self.onUserLoggedIn = function (user) {
self.is_admin(self.loginState.isAdmin());
- if(self.is_admin() && self.startup_complete) {
+ if (self.is_admin() && self.startup_complete) {
//console.log("octolapse.js - User Logged In after startup - Loading settings. User: " + user.name);
Octolapse.Settings.loadSettings();
+ Octolapse.Status.load_files();
}
- //else
- //console.log("octolapse.js - User Logged In before startup - waiting to load settings. User: " + user.name);
+
};
self.onUserLoggedOut = function () {
@@ -1245,9 +1451,9 @@ $(function () {
Octolapse.Settings.clearSettings();
};
- self.onEventPrinterStateChanged = function(payload){
+ self.onEventPrinterStateChanged = function (payload) {
//console.log("Octolapse.js - Received print state change.");
- if (payload.state_id == "CANCELLING") {
+ if (payload.state_id === "CANCELLING") {
//console.log("Octolapse.js - Printer is cancelling.");
// We need to close any progress diagogs
if (self.pre_processing_progress != null) {
@@ -1260,16 +1466,16 @@ $(function () {
//console.log("octolapse.js - updateState");
if (data.state != null) {
- Octolapse.Status.updateState(data.state)
+ Octolapse.Status.updateState(data.state);
}
if (data.main_settings != null) {
//console.log('octolapse.js - Main settings changed');
// detect changes to auto_reload_latest_snapshot
- var cur_auto_reload_latest_snapshot = Octolapse.Globals.auto_reload_latest_snapshot();
+ var cur_auto_reload_latest_snapshot = Octolapse.Globals.main_settings.auto_reload_latest_snapshot();
- Octolapse.Globals.update(data.main_settings);
- if (cur_auto_reload_latest_snapshot !== Octolapse.Globals.auto_reload_latest_snapshot()) {
- //console.log('octolapse.js - Octolapse.Globals.auto_reload_latest_snapshot changed, erasing previous snapshot images');
+ Octolapse.Globals.main_settings.update(data.main_settings);
+ if (cur_auto_reload_latest_snapshot !== Octolapse.Globals.main_settings.auto_reload_latest_snapshot()) {
+ //console.log('octolapse.js - Octolapse.Globals.main_settings.auto_reload_latest_snapshot changed, erasing previous snapshot images');
Octolapse.Status.erasePreviousSnapshotImages('octolapse_snapshot_image_container');
Octolapse.Status.erasePreviousSnapshotImages('octolapse_snapshot_thumbnail_container');
}
@@ -1279,100 +1485,22 @@ $(function () {
//console.log("octolapse.js - Updating Status");
Octolapse.Status.update(data.status);
}
+ if (data.snapshot_plan_preview) {
+ var plans = data.snapshot_plan_preview;
+ self.preprocessing_job_guid = plans.preprocessing_job_guid;
+ Octolapse.Status.previewSnapshotPlans(plans.snapshot_plans);
+ }
/*
if (!self.HasLoadedState) {
Octolapse.Status.updateLatestSnapshotImage(true);
Octolapse.Status.updateLatestSnapshotThumbnail(true);
}
*/
- self.has_loaded_state(true);
- };
-
- self.update = function (settings) {
- //console.log("octolapse.js - Globals - Updating main_settings globals")
- // enabled
- if (ko.isObservable(settings.is_octolapse_enabled))
- self.enabled(settings.is_octolapse_enabled());
- else
- self.enabled(settings.is_octolapse_enabled);
-
- if (ko.isObservable(settings.version))
- self.version(settings.version());
- else
- self.version(settings.version);
-
- // self.auto_reload_latest_snapshot
- if (ko.isObservable(settings.auto_reload_latest_snapshot))
- self.auto_reload_latest_snapshot(settings.auto_reload_latest_snapshot());
- else
- self.auto_reload_latest_snapshot(settings.auto_reload_latest_snapshot);
- //auto_reload_frames
- if (ko.isObservable(settings.auto_reload_frames))
- self.auto_reload_frames(settings.auto_reload_frames());
- else
- self.auto_reload_frames(settings.auto_reload_frames);
- // navbar_enabled
- if (ko.isObservable(settings.show_navbar_icon))
- self.navbar_enabled(settings.show_navbar_icon());
- else
- self.navbar_enabled(settings.show_navbar_icon);
-
- if (ko.isObservable(settings.show_navbar_when_not_printing))
- self.show_navbar_when_not_printing(settings.show_navbar_when_not_printing());
- else
- self.show_navbar_when_not_printing(settings.show_navbar_when_not_printing);
-
-
- if (ko.isObservable(settings.show_printer_state_changes))
- self.show_printer_state_changes(settings.show_printer_state_changes());
- else
- self.show_printer_state_changes(settings.show_printer_state_changes);
-
- if (ko.isObservable(settings.show_position_changes))
- self.show_position_changes(settings.show_position_changes());
- else
- self.show_position_changes(settings.show_position_changes);
-
- if (ko.isObservable(settings.show_extruder_state_changes))
- self.show_extruder_state_changes(settings.show_extruder_state_changes());
- else
- self.show_extruder_state_changes(settings.show_extruder_state_changes);
-
- if (ko.isObservable(settings.show_snapshot_plan_information))
- self.show_snapshot_plan_information(settings.show_snapshot_plan_information());
- else
- self.show_snapshot_plan_information(settings.show_snapshot_plan_information);
-
- if (ko.isObservable(settings.preview_snapshot_plans))
- self.preview_snapshot_plans(settings.preview_snapshot_plans());
- else
- self.preview_snapshot_plans(settings.preview_snapshot_plans);
-
- if (ko.isObservable(settings.automatic_updates_enabled))
- self.automatic_updates_enabled(settings.automatic_updates_enabled());
- else
- self.automatic_updates_enabled(settings.automatic_updates_enabled);
-
- if (ko.isObservable(settings.automatic_update_interval_days ))
- self.automatic_update_interval_days(settings.automatic_update_interval_days());
- else
- self.automatic_update_interval_days(settings.automatic_update_interval_days);
-
- if (ko.isObservable(settings.show_trigger_state_changes))
- self.show_trigger_state_changes(settings.show_trigger_state_changes());
- else
- self.show_trigger_state_changes(settings.show_trigger_state_changes);
-
- if (ko.isObservable(settings.cancel_print_on_startup_error))
- self.cancel_print_on_startup_error(settings.cancel_print_on_startup_error());
- else
- self.cancel_print_on_startup_error(settings.cancel_print_on_startup_error);
-
};
- self.acceptSnapshotPlanPreview = function(){
+ self.acceptSnapshotPlanPreview = function () {
//console.log("Accepting snapshot plan preview.");
- var data = {"preprocessing_job_guid":self.preprocessing_job_guid};
+ var data = { "preprocessing_job_guid": self.preprocessing_job_guid };
$.ajax({
url: "./plugin/octolapse/acceptSnapshotPlanPreview",
type: "POST",
@@ -1382,12 +1510,9 @@ $(function () {
data: JSON.stringify(data),
dataType: "json",
success: function (result) {
- if(result.success)
- {
+ if (result.success) {
Octolapse.Status.SnapshotPlanPreview.closeSnapshotPlanPreviewDialog();
- }
- else
- {
+ } else {
var options = {
title: 'Error Accepting Plan',
text: result.error,
@@ -1395,7 +1520,7 @@ $(function () {
hide: false,
addclass: "octolapse",
desktop: {
- desktop: true
+ desktop: false
}
};
Octolapse.displayPopup(options);
@@ -1410,7 +1535,7 @@ $(function () {
hide: false,
addclass: "octolapse",
desktop: {
- desktop: true
+ desktop: false
}
};
Octolapse.displayPopup(options);
@@ -1419,9 +1544,9 @@ $(function () {
});
};
- self.cancelPreprocessing = function(){
+ self.cancelPreprocessing = function () {
//console.log("Cancelling preprocessing")
- var data = {"cancel":true, "preprocessing_job_guid":self.preprocessing_job_guid};
+ var data = { "cancel": true, "preprocessing_job_guid": self.preprocessing_job_guid };
$.ajax({
url: "./plugin/octolapse/cancelPreprocessing",
type: "POST",
@@ -1431,9 +1556,9 @@ $(function () {
data: JSON.stringify(data),
dataType: "json",
success: function (result) {
- if (self.pre_processing_progress != null) {
- self.pre_processing_progress.close();
- }
+ if (self.pre_processing_progress != null) {
+ self.pre_processing_progress.close();
+ }
},
error: function (XMLHttpRequest, textStatus, errorThrown) {
var message = "Could not cancel preprocessing. Status: " + textStatus + ". Error: " + errorThrown;
@@ -1444,7 +1569,7 @@ $(function () {
hide: false,
addclass: "octolapse",
desktop: {
- desktop: true
+ desktop: false
}
};
Octolapse.displayPopup(options);
@@ -1463,8 +1588,8 @@ $(function () {
switch (data.type) {
case "snapshot-plan-preview":
//console.log("Previewing snapshot plans.");
- self.preprocessing_job_guid = data.preprocessing_job_guid;
- Octolapse.Status.previewSnapshotPlans(data.snapshot_plans);
+ self.updateState(data);
+
break;
case "snapshot-plan-preview-complete":
// create the cancel popup
@@ -1475,29 +1600,28 @@ $(function () {
// create the cancel popup
//console.log("Creating a progress bar.");
self.preprocessing_job_guid = data.preprocessing_job_guid;
- self.pre_processing_progress = Octolapse.progressBar(self.cancelPreprocessing, "Initializing...");
+ self.pre_processing_progress = Octolapse.progressBar(self.cancelPreprocessing, "Initializing...");
break;
case "gcode-preprocessing-update":
//console.log("Octolapse received pre-processing update processing message.");
// TODO: CHANGE THIS TO A PROGRESS INDICATOR
- var percent_finished = data.percent_progress.toFixed(1);
+ var percent_finished = data.percent_progress;
var seconds_elapsed = data.seconds_elapsed;
var seconds_to_complete = data.seconds_to_complete;
var gcodes_processed = data.gcodes_processed;
var lines_processed = data.lines_processed;
- if (self.pre_processing_progress == null)
- {
+ if (self.pre_processing_progress == null) {
//console.log("The pre-processing progress bar is missing, creating the progress bar.");
//console.log("Creating progress bar");
- self.pre_processing_progress = Octolapse.progressBar(self.cancelPreprocessing);
+ self.pre_processing_progress = Octolapse.progressBar(self.cancelPreprocessing);
}
if (self.pre_processing_progress != null) {
var progress_text =
"Remaining:" + Octolapse.ToTimer(seconds_to_complete)
- + " Elapsed:" + Octolapse.ToTimer(seconds_elapsed)
- + " Line:" + lines_processed.toString();
+ + " Elapsed:" + Octolapse.ToTimer(seconds_elapsed)
+ + " Line:" + lines_processed.toString();
//console.log("Receiving Progress - Percent Complete:" + percent_finished + " " + progress_text);
self.pre_processing_progress = self.pre_processing_progress.update(
percent_finished, progress_text
@@ -1509,232 +1633,236 @@ $(function () {
// clear the job guid
//console.log("Gcode preprocessing failed.");
self.preprocessing_job_guid = null;
- // report the issue
+ self.updateState(data);
+
var options = {
- title: 'Preprocessing Error',
- text: data.errors,
+ title: 'Gcode Processing Failed',
type: 'error',
hide: false,
addclass: "octolapse",
desktop: {
- desktop: true
+ desktop: false
}
};
- Octolapse.displayPopupForKey(
- options,['gcode-preprocessing-failed'],['gcode-preprocessing-failed']
+ Octolapse.Help.showPopupForErrors(
+ options,
+ "gcode-preprocessing-failed",
+ ["gcode-preprocessing-failed"],
+ data.errors
);
break;
+
case "updated-profiles-available":
- if (self.is_admin())
- {
- var message;
- if (Octolapse.Status.is_timelapse_active())
- {
- message = "There are profiles available to update. " +
- "It is safe to update these profiles while a timelapse is running. " +
- "Would you like to update these now?";
- }
- else
- {
- message = "There are profiles available to update. " +
- " Would you like to update these now?";
- }
- Octolapse.showConfirmDialog(
- "update-all-automatic-profiles",
- "Update Octolapse Profiles",
- message,
- function(){
- Octolapse.Settings.updateProfilesFromServer();
- },
- function() {
- Octolapse.Settings.suppressServerUpdates();
- }
- );
+ if (self.is_admin()) {
+ Octolapse.Settings.showProfileUpdateConfirmation(data.available_profile_count);
}
break;
case "external_profiles_list_changed":
- Octolapse.Printers.profileOptions.server_profiles = data.server_profiles;
+ Octolapse.Settings.UpdateAvailableServerProfiles(data.server_profiles);
+ var msg_options = {
+ title: 'New Server Profiles Available',
+ text: "New profiles were found in the octolapse profile repository. These can be imported when adding/editing a profile.",
+ type: 'notice',
+ hide: true,
+ addclass: "octolapse",
+ desktop: {
+ desktop: false
+ }
+ };
+ Octolapse.displayPopupForKey(msg_options, "new-profiles-available", "new-profiles-available");
break;
- case "settings-changed":
- {
- if (Octolapse.Settings.is_loaded())
- self.updateState(data);
- // Was this from us?
- if (self.client_id !== data.client_id && self.is_admin())
- {
- Octolapse.showConfirmDialog(
- "reload-settings",
- "Reload Settings",
- "A settings change was detected from another client. Reload settings?",
- function(){
- Octolapse.Settings.loadSettings();
- });
+ case "settings-changed": {
+ // See if the settings changed request came from the current client. If so, ignore it
+ if (self.client_id !== data.client_id) {
+ if (self.is_admin()) {
+ Octolapse.Settings.loadSettings();
+ } else {
+ Octolapse.Globals.loadState();
}
+ } else {
+ Octolapse.Globals.loadState();
}
+ }
break;
case "slicer_settings_detected":
- if(data.saved) {
+ if (data.saved) {
//console.log("Slicer settings detected and saved.");
- if(data.printer_profile_json != null)
- {
+ if (data.printer_profile_json != null) {
var new_profile = JSON.parse(data.printer_profile_json);
var current_profile = Octolapse.Printers.getProfileByGuid(new_profile.guid);
- if (current_profile != null)
- {
+ if (current_profile != null) {
Octolapse.Printers.profiles.replace(current_profile, new Octolapse.PrinterProfileViewModel(new_profile));
- }
- else
- {
+ } else {
console.error("Octolapse.js - Unable to find the updated printer profile from the current profiles!");
}
//Octolapse.Printers.replace(currentProfile, newProfile);
}
}
- //else
- // console.log("Slicer settings detected but not saved.");
- // Disable the error notification for profiles that haven't been configured
- case "state-loaded":
- {
- //console.log('octolapse.js - state-loaded');
- self.updateState(data);
- }
break;
- case "state-changed":
- {
- //console.log('octolapse.js - state-changed');
- //console.log(data);
+ case "state-changed": {
+ //console.log('octolapse.js - state-changed');
+ if (data.state) {
self.updateState(data);
+ } else if (data.client_id !== self.client_id) {
+ // The update contains no state. See if it originated from a client
+ self.loadState();
}
+ }
break;
- case "popup":
- {
- //console.log('octolapse.js - popup');
- var options = {
- title: 'Octolapse Notice',
- text: data.msg,
- type: 'notice',
- hide: true,
- addclass: "octolapse",
- desktop: {
- desktop: true
- }
- };
- Octolapse.displayPopup(options);
- }
+ case "popup": {
+ //console.log('octolapse.js - popup');
+ var popup_options = {
+ title: 'Octolapse Notice',
+ text: data.msg,
+ type: 'notice',
+ hide: true,
+ addclass: "octolapse",
+ desktop: {
+ desktop: false
+ }
+ };
+ Octolapse.displayPopup(popup_options);
+ }
break;
- case "popup-error":
- {
- //console.log('octolapse.js - popup-error');
- self.updateState(data);
- var options = {
- title: 'Error',
- text: data.msg,
- type: 'error',
- hide: false,
- addclass: "octolapse",
- desktop: {
- desktop: true
- }
- };
- Octolapse.displayPopup(options);
- break;
- }
- case "print-start-error":
- {
- //console.log('octolapse.js - print-start-error');
- self.updateState(data);
- var options = {
- title: 'Octolapse Startup Failed',
- text: data.msg,
- type: 'error',
- hide: false,
- addclass: "octolapse",
- desktop: {
- desktop: true
- }
- };
- Octolapse.displayPopupForKey(options,"print-start-error",["print-start-error"])
- break;
- }
- case "timelapse-start":
- {
- //console.log('octolapse.js - timelapse-start');
- // Erase any previous images
- Octolapse.HasTakenFirstSnapshot = false;
- // let the status tab know that a timelapse is starting
- Octolapse.Status.onTimelapseStart();
- self.updateState(data);
- Octolapse.Status.snapshot_error(false);
- }
+ case "popup-error": {
+ //console.log('octolapse.js - popup-error');
+ self.updateState(data);
+ var popupErrorOptions = {
+ title: 'Error',
+ text: data.msg,
+ type: 'error',
+ hide: false,
+ addclass: "octolapse",
+ desktop: {
+ desktop: false
+ }
+ };
+ Octolapse.displayPopup(popupErrorOptions);
+ break;
+ }
+ case "print-start-error": {
+ //console.log('octolapse.js - print-start-error');
+ self.updateState(data);
+ self.preprocessing_job_guid = null;
+ var printStartPopupoptions = {
+ title: 'Octolapse Startup Failed',
+ text: data.msg,
+ type: 'error',
+ hide: false,
+ addclass: "octolapse",
+ desktop: {
+ desktop: false
+ }
+ };
+ Octolapse.Help.showPopupForErrors(printStartPopupoptions, "print-start-error", ["print-start-error"], data["errors"]);
+ break;
+ }
+ case "print-start-warning": {
+ //console.log('octolapse.js - print-start-error');
+ self.updateState(data);
+ self.preprocessing_job_guid = null;
+ var printStartPopupoptions = {
+ title: 'Octolapse Cannot Start',
+ text: data.msg,
+ type: 'warning',
+ hide: false,
+ addclass: "octolapse",
+ desktop: {
+ desktop: false
+ }
+ };
+ Octolapse.Help.showPopupForErrors(printStartPopupoptions, "print-start-error", ["print-start-error"], data["errors"]);
+ break;
+ }
+ case "timelapse-start": {
+ //console.log('octolapse.js - timelapse-start');
+ // Erase any previous images
+ Octolapse.HasTakenFirstSnapshot = false;
+ // let the status tab know that a timelapse is starting
+ Octolapse.Status.onTimelapseStart();
+ self.updateState(data);
+ Octolapse.Status.snapshot_error(false);
+ }
break;
- case "timelapse-complete":
- {
- //console.log('octolapse.js - timelapse-complete');
- Octolapse.Status.snapshot_error(false);
- self.updateState(data)
+ case "timelapse-complete": {
+ //console.log('octolapse.js - timelapse-complete');
+ Octolapse.Status.snapshot_error(false);
+ self.updateState(data);
- }
+ }
break;
case "camera-settings-error":
// If only the camera image acquisition failed, use the camera error message
- var options = {
+ var cameraSettingsErrorPopup = {
title: 'Octolapse - Camera Settings Error',
text: data.msg,
type: 'error',
hide: false,
addclass: "octolapse"
};
- Octolapse.displayPopupForKey(options, "snapshot_error",["snapshot_error"]);
+ Octolapse.displayPopupForKey(cameraSettingsErrorPopup, "snapshot_error", ["snapshot_error"]);
break;
- case "snapshot-start":
- {
- //console.log('octolapse.js - snapshot-start');
- self.updateState(data);
- Octolapse.Status.snapshot_error(false);
- }
+ case "snapshot-start": {
+ //console.log('octolapse.js - snapshot-start');
+ self.updateState(data);
+ Octolapse.Status.snapshot_error(false);
+ }
break;
- case "snapshot-complete":
- {
- //console.log('octolapse.js - snapshot-complete');
- //console.log(data);
- self.updateState(data);
+ case "snapshot-complete": {
+ //console.log('octolapse.js - snapshot-complete');
+ //console.log(data);
+ self.updateState(data);
- var hasError =!(data.success && data.snapshot_success);
- Octolapse.Status.snapshot_error(hasError);
- if(hasError)
- {
- // If only the camera image acquisition failed, use the camera error message
- if (!data.success)
- {
- var options = {
- title: "Stabilization Error",
- text: data.error,
- type: 'error',
- hide: false,
- addclass: "octolapse"
- };
- Octolapse.displayPopupForKey(options, "stabilization_error", ["stabilization_error"])
- }
- if (!data.snapshot_success)
- {
- var options = {
- title: "Camera Error",
- text: data.snapshot_error,
- type: 'error',
- hide: false,
- addclass: "octolapse"
- };
- Octolapse.displayPopupForKey(options, "camera_error",["camera_error"])
- }
+ var hasError = !(data.success && data.snapshot_success);
+ Octolapse.Status.snapshot_error(hasError);
+ if (hasError) {
+ // If only the camera image acquisition failed, use the camera error message
+ if (!data.success) {
+ var snapshotCompleteSuccessPopupOptions = {
+ title: "Stabilization Error",
+ text: data.error,
+ type: 'error',
+ hide: false,
+ addclass: "octolapse"
+ };
+ Octolapse.displayPopupForKey(snapshotCompleteSuccessPopupOptions, "stabilization_error", ["stabilization_error"]);
+ }
+ if (!data.snapshot_success) {
+ var snapshotCompleteErrorPopupOptions = {
+ title: "Camera Error",
+ text: data.snapshot_error,
+ type: 'error',
+ hide: false,
+ addclass: "octolapse"
+ };
+ Octolapse.displayPopupForKey(snapshotCompleteErrorPopupOptions, "camera_error", ["camera_error"]);
+ }
- }
+ }
+ }
+ break;
+ case "snapshot-post-proocessing-failed": {
+ self.updateState(data);
+ Octolapse.Status.snapshot_error(true);
+ // If only the camera image acquisition failed, use the camera error message
+
+ if (!data.snapshot_success) {
+ var postProcessingFailedPopupOptions = {
+ title: "Camera Processing Error",
+ text: data.message,
+ type: 'error',
+ hide: false,
+ addclass: "octolapse"
+ };
+ Octolapse.displayPopupForKey(postProcessingFailedPopupOptions, "camera_error", ["camera_error"]);
}
+ }
break;
case "new-thumbnail-available":
- if (data.guid == $("#octolapse_current_snapshot_camera").val()) {
+ if (data.guid === $("#octolapse_current_snapshot_camera").val()) {
//console.log("New thumbnails available");
if (!Octolapse.HasTakenFirstSnapshot) {
Octolapse.HasTakenFirstSnapshot = true;
@@ -1748,206 +1876,229 @@ $(function () {
}
}
break;
- case "prerender-start":
+ case "directories-changed": {
+ //console.log('octolapse.js - directories changed.');
+ var directories = data.directories;
+ if (directories.temporary_directory_changed) {
+ // Load unfinished
+ Octolapse.Status.dialog_rendering_unfinished.load();
+ }
+ if (directories.snapshot_archive_directory_changed) {
+ // Load snapshot archive
+ Octolapse.Status.timelapse_files_dialog.archive_browser.load();
+ }
+ if (directories.timelapse_directory_changed) {
+ // load timelapses
+ Octolapse.Status.timelapse_files_dialog.timelapse_browser.load();
+ }
+ }
+ break;
+ case "unfinished-renderings-loaded": {
+ //console.log('octolapse.js - unfinished-renderings-loaded');
self.updateState(data);
+ }
break;
- case "render-start":
- {
- //console.log('octolapse.js - render-start');
- self.updateState(data);
- Octolapse.Status.snapshot_error(false);
-
- var options = {
- title: 'Octolapse Rendering Started',
- text: data.msg,
- type: 'notice',
- hide: true,
- addclass: "octolapse",
- desktop: {
- desktop: true
- }
- };
- Octolapse.displayPopupForKey(options,"render_message", ["render_message"]);
- }
+ case "unfinished-renderings-changed": {
+ //console.log('octolapse.js - unfinished-renderings-changed');
+ self.updateState(data);
+ }
break;
- case "render-failed":{
- //console.log('octolapse.js - render-failed');
- self.updateState(data);
- var options = {
- title: 'Octolapse Rendering Failed',
- text: data.msg,
- type: 'error',
- hide: false,
- addclass: "octolapse",
- desktop: {
- desktop: true
- }
- };
- Octolapse.displayPopupForKey(options,"render_failed",["render_message"]);
- break;
+ case "render-start": {
+ //console.log('octolapse.js - render-start');
+ self.updateState(data);
+ /*
+ Octolapse.Status.snapshot_error(false);
+ var options = {
+ title: 'Octolapse Rendering Started',
+ text: data.msg,
+ type: 'notice',
+ hide: true,
+ addclass: "octolapse",
+ desktop: {
+ desktop: false
+ }
+ };
+ Octolapse.displayPopupForKey(options,"render_message", ["render_message"]);*/
}
- case "post-render-failed":{
- //console.log('octolapse.js - post-render-failed');
- self.updateState(data);
- var options = {
- title: 'Octolapse Post-Rendering Failed',
- text: data.msg,
- type: 'error',
- hide: false,
- addclass: "octolapse",
- desktop: {
- desktop: true
- }
- };
- Octolapse.displayPopupForKey(options,"post_render_error_message",["render_message"]);
- break;
+ break;
+ case "render-failed": {
+ //console.log('octolapse.js - render-failed');
+ self.updateState(data);
+ var renderFailedPopupOptions = {
+ title: 'Octolapse Rendering Failed',
+ text: data.msg,
+ type: 'error',
+ hide: true,
+ addclass: "octolapse",
+ desktop: {
+ desktop: false
+ }
+ };
+ Octolapse.displayPopup(renderFailedPopupOptions);
+ break;
}
+ case "post-render-failed": {
+ //console.log('octolapse.js - post-render-failed');
+ self.updateState(data);
+ var postRenderFailedPopupOptions = {
+ title: 'Octolapse Post-Rendering Failed',
+ text: data.msg,
+ type: 'error',
+ hide: true,
+ addclass: "octolapse",
+ desktop: {
+ desktop: false
+ }
+ };
+ Octolapse.displayPopup(postRenderFailedPopupOptions);
+ break;
+ }
+ case "render-progress":
+ //console.log('octolapse.js - render-progress');
+ self.updateState(data);
+ break;
case "render-complete":
self.updateState(data);
- //console.log('octolapse.js - render-complete');
self.OctoprintTimelapse.requestData();
-
- // Make sure we aren't synchronized, else there's no reason to display a popup
+ //console.log('octolapse.js - render-complete');
+ /*
var options = {
title: 'Octolapse Rendering Complete',
text: data.msg,
type: 'success',
- hide: false,
+ hide: true,
addclass: "octolapse",
desktop: {
- desktop: true
+ desktop: false
}
};
- Octolapse.displayPopupForKey(options,"render_complete",["render_message"]);
+ Octolapse.displayPopupForKey(options,"render_complete",["render_complete", "render_message"]);*/
break;
- case "render-end":
- {
- //console.log('octolapse.js - render-end');
- self.updateState(data);
- }
+ case "render-end": {
+ //console.log('octolapse.js - render-end');
+ self.updateState(data);
+ }
break;
- case "synchronize-failed":
- {
- //console.log('octolapse.js - synchronize-failed');
- var options = {
- title: 'Octolapse Synchronization Failed',
- text: data.msg,
- type: 'error',
- hide: false,
- addclass: "octolapse",
- desktop: {
- desktop: true
- }
- };
- Octolapse.displayPopup(options);
- }
+ case "timelapse-stopping": {
+ //console.log('octolapse.js - timelapse-stoping');
+ Octolapse.Status.is_timelapse_active(false);
+ var timelapseStoppingPopupOptions = {
+ title: 'Octolapse Timelapse Stopping',
+ text: data.msg,
+ type: 'notice',
+ hide: true,
+ addclass: "octolapse",
+ desktop: {
+ desktop: false
+ }
+ };
+ Octolapse.displayPopup(timelapseStoppingPopupOptions);
+ }
break;
- case "timelapse-stopping":
- {
- //console.log('octolapse.js - timelapse-stoping');
- Octolapse.Status.is_timelapse_active(false);
- var options = {
- title: 'Octolapse Timelapse Stopping',
- text: data.msg,
- type: 'notice',
- hide: true,
- addclass: "octolapse",
- desktop: {
- desktop: true
- }
- };
- Octolapse.displayPopup(options);
- }
+ case "timelapse-stopped": {
+ //console.log('octolapse.js - timelapse-stopped');
+ Octolapse.Status.onTimelapseStop();
+ Octolapse.Status.snapshot_error(false);
+ var timelapseStoppedPopupOptions = {
+ title: 'Octolapse Timelapse Stopped',
+ text: data.msg,
+ type: 'notice',
+ hide: true,
+ addclass: "octolapse",
+ desktop: {
+ desktop: false
+ }
+ };
+ Octolapse.displayPopup(timelapseStoppedPopupOptions);
+ }
break;
- case "timelapse-stopped":
- {
- //console.log('octolapse.js - timelapse-stopped');
- Octolapse.Status.onTimelapseStop();
- Octolapse.Status.snapshot_error(false);
- var options = {
- title: 'Octolapse Timelapse Stopped',
- text: data.msg,
- type: 'notice',
- hide: true,
- addclass: "octolapse",
- desktop: {
- desktop: true
- }
- };
- Octolapse.displayPopup(options);
- }
+ case "disabled-running": {
+ var disabledButRunningPopupOptions = {
+ title: 'Octolapse Disabled for Next Print',
+ text: data.msg,
+ type: 'notice',
+ hide: true,
+ addclass: "octolapse",
+ desktop: {
+ desktop: false
+ }
+ };
+ Octolapse.displayPopupForKey(disabledButRunningPopupOptions, "settings-change-not-applied", ["settings-change-not-applied"]);
+ }
break;
- case "disabled-running":
- {
- var options = {
- title: 'Octolapse Disabled for Next Print',
- text: data.msg,
- type: 'notice',
- hide: true,
- addclass: "octolapse",
- desktop: {
- desktop: true
- }
- };
- Octolapse.displayPopup(options);
- }
- break;
- case "timelapse-stopped-error":
- {
- //console.log('octolapse.js - timelapse-stopped-error');
- Octolapse.Status.onTimelapseStop();
- var options = {
- title: 'Octolapse Timelapse Stopped',
- text: data.msg,
- type: 'error',
- hide: false,
- addclass: "octolapse"
- };
- Octolapse.displayPopup(options);
- }
+ case "test-mode-changed-running": {
+ var testModeChangedWhileRunningPopupOptions = {
+ title: 'Test Mode Changed, Octolapse Running',
+ text: data.msg,
+ type: 'notice',
+ hide: true,
+ addclass: "octolapse",
+ desktop: {
+ desktop: false
+ }
+ };
+ Octolapse.displayPopupForKey(testModeChangedWhileRunningPopupOptions, "settings-change-not-applied", ["settings-change-not-applied"]);
+ }
break;
- case "out-of-bounds":
- {
- //console.log("An out-of-bounds snapshot position was detected.")
- var options = {
- title: 'Octolapse - Out Of Bounds',
- text: data.msg ,
- type: 'error',
- hide: false,
- addclass: "octolapse"
- };
- Octolapse.displayPopupForKey(options,"out-of-bounds", ["out-of-bounds"]);
- }
+ case "timelapse-stopped-error": {
+ //console.log('octolapse.js - timelapse-stopped-error');
+ Octolapse.Status.onTimelapseStop();
+ var timelapseStoppedErrorPopupOptions = {
+ title: 'Octolapse Timelapse Stopped',
+ text: data.msg,
+ type: 'error',
+ hide: false,
+ addclass: "octolapse"
+ };
+ Octolapse.displayPopup(timelapseStoppedErrorPopupOptions);
+ }
break;
- case "position-error":
- {
- //console.log("An out-of-bounds snapshot position was detected.")
- var options = {
- title: 'Octolapse - Position Error',
- text: data.msg,
- type: 'error',
- hide: false,
- addclass: "octolapse"
- };
- Octolapse.displayPopupForKey(options, "position-error", ["position-error"]);
+ case "out-of-bounds": {
+ //console.log("An out-of-bounds snapshot position was detected.")
+ var outOfBoundsErrorPopupOptions = {
+ title: 'Octolapse - Out Of Bounds',
+ text: data.msg,
+ type: 'error',
+ hide: false,
+ addclass: "octolapse"
+ };
+ Octolapse.displayPopupForKey(outOfBoundsErrorPopupOptions, "out-of-bounds", ["out-of-bounds"]);
+ }
+ break;
+ case "position-error": {
+ //console.log("An out-of-bounds snapshot position was detected.")
+ // This should never be called. May need to remove!
+ var positionErrorPopupOptions = {
+ title: 'Octolapse - Position Error',
+ text: data.msg,
+ type: 'error',
+ hide: false,
+ addclass: "octolapse"
+ };
+ Octolapse.displayPopupForKey(positionErrorPopupOptions, "position-error", ["position-error"]);
+ }
+ break;
+ case "file-changed": {
+ if (data.client_id !== self.client_id) {
+ Octolapse.Status.files_changed(data.file, data.action);
}
+ }
break;
case "warning":
//console.log("A warning was sent to the plugin.")
- var options = {
+ var warningPopupOptions = {
title: 'Octolapse - Warning',
text: data.msg,
type: 'notice',
hide: true,
addclass: "octolapse"
};
- Octolapse.displayPopup(options, "warning");
+ Octolapse.displayPopup(warningPopupOptions, "warning");
break;
- default:
- {
- //console.log('Octolapse.js - passing on message from server. DataType:' + data.type);
- }
+ default: {
+ //console.log('Octolapse.js - passing on message from server. DataType:' + data.type);
+ }
}
};
diff --git a/octoprint_octolapse/static/js/octolapse.profiles.camera.js b/octoprint_octolapse/static/js/octolapse.profiles.camera.js
index e7f55ba6..68182176 100644
--- a/octoprint_octolapse/static/js/octolapse.profiles.camera.js
+++ b/octoprint_octolapse/static/js/octolapse.profiles.camera.js
@@ -1,7 +1,7 @@
/*
##################################################################################
# Octolapse - A plugin for OctoPrint used for making stabilized timelapse videos.
-# Copyright (C) 2017 Brad Hochgesang
+# Copyright (C) 2023 Brad Hochgesang
##################################################################################
# This program is free software: you can redistribute it and/or modify
# it under the terms of the GNU Affero General Public License as published
@@ -32,30 +32,28 @@ $(function() {
self.enabled = ko.observable(values.enabled);
self.description = ko.observable(values.description);
self.camera_type = ko.observable(values.camera_type);
+ self.on_before_snapshot_gcode = ko.observable(values.on_before_snapshot_gcode);
self.gcode_camera_script = ko.observable(values.gcode_camera_script);
+ self.on_after_snapshot_gcode = ko.observable(values.on_after_snapshot_gcode);
self.on_print_start_script = ko.observable(values.on_print_start_script);
self.on_before_snapshot_script = ko.observable(values.on_before_snapshot_script);
self.external_camera_snapshot_script = ko.observable(values.external_camera_snapshot_script);
self.on_after_snapshot_script = ko.observable(values.on_after_snapshot_script);
self.on_before_render_script = ko.observable(values.on_before_render_script);
self.on_after_render_script = ko.observable(values.on_after_render_script);
+ self.on_print_end_script = ko.observable(values.on_print_end_script);
self.delay = ko.observable(values.delay);
self.timeout_ms = ko.observable(values.timeout_ms);
self.enable_custom_image_preferences = ko.observable(values.enable_custom_image_preferences);
self.apply_settings_before_print = ko.observable(values.apply_settings_before_print);
self.apply_settings_at_startup = ko.observable(values.apply_settings_at_startup);
+ self.apply_settings_when_disabled = ko.observable(values.apply_settings_when_disabled);
self.snapshot_transpose = ko.observable(values.snapshot_transpose);
- self.camera_stream_closed = false;
- self.camera_stream_visible = ko.pureComputed(function(){
- var visible = (
- self.camera_type() === 'webcam' &&
- self.enable_custom_image_preferences() &&
- !self.camera_stream_closed
- );
- self.webcam_settings.setStreamVisibility(visible);
- return visible;
- });
- self.webcam_settings = new Octolapse.WebcamSettingsViewModel(null);
+ self.webcam_settings = new Octolapse.WebcamSettingsViewModel();
+ self.webcam_settings_popup = new Octolapse.WebcamSettingsPopupViewModel("octolapse_camera_image_preferences_popup");
+ self.webcam_settings_popup.webcam_settings.updateWebcamSettings(values.webcam_settings);
+ self.is_dialog_open = ko.observable(false);
+
self.is_testing_custom_image_preferences = ko.observable(false);
self.applySettingsToCamera = function (settings_type) {
@@ -97,7 +95,7 @@ $(function() {
});
};
- self.toggleCamera = function(){
+ self.toggleCamera = function(callback){
// If no guid is supplied, this is a new profile. We will need to know that later when we push/update our observable array
//console.log("Running camera request.");
var data = { 'guid': self.guid(), "client_id": Octolapse.Globals.client_id };
@@ -110,6 +108,10 @@ $(function() {
success: function (results) {
if (results.success) {
self.enabled(results.enabled);
+ if (callback)
+ {
+ callback(results.enabled);
+ }
}
else {
var options = {
@@ -119,13 +121,11 @@ $(function() {
hide: false,
addclass: "octolapse",
desktop: {
- desktop: true
+ desktop: false
}
};
Octolapse.displayPopup(options);
-
}
-
},
error: function (XMLHttpRequest, textStatus, errorThrown) {
var message = "Unable to toggle the camera:( Status: " + textStatus + ". Error: " + errorThrown;
@@ -136,7 +136,7 @@ $(function() {
hide: false,
addclass: "octolapse",
desktop: {
- desktop: true
+ desktop: false
}
};
Octolapse.displayPopup(options);
@@ -144,6 +144,7 @@ $(function() {
});
};
+
self.testCamera = function () {
// If no guid is supplied, this is a new profile. We will need to know that later when we push/update our observable array
//console.log("Running camera request.");
@@ -191,25 +192,104 @@ $(function() {
});
};
- self.toggleCustomImagePreferences = function () {
- var id = 'camera_profile_apply_settings_before_print';
+ self.testCameraScript = function(script_type)
+ {
+ // If no guid is supplied, this is a new profile. We will need to know that later when we push/update our observable array
+ //console.log("Running camera request.");
+ var message = "Testing the " + script_type + " script with " + (self.timeout_ms() / 1000.0).toFixed(2) + " second timeout. Please do not attempt" +
+ " to run any further tests until this script has finished. If your script times out, try increasing your 'Snapshot Timeout'.";
+ var testing_popup = {
+ title: "Testing Camera Script",
+ text: message,
+ type: "info",
+ hide: false,
+ addclass: "octolapse"
+ };
+ Octolapse.displayPopupForKey(testing_popup, "camera_script_test", ["camera_script_test"]);
+
+ var data = { 'profile': self.toJS(self), 'script_type': script_type };
+ $.ajax({
+ url: "./plugin/octolapse/testCameraScript",
+ type: "POST",
+ data: JSON.stringify(data),
+ contentType: "application/json",
+ dataType: "json",
+ success: function (results) {
+ if (results.success){
+ var title = "Camera Script Success";
+ var message_type='success';
+ var message = "The script appears to work! No errors or error codes were returned.";
+ var hide = true;
+ if (script_type == 'snapshot') {
+ if (results.snapshot_created)
+ {
+ message = "The script appears to work, and a snapshot was found! No errors or error codes were returned.";
+ }
+ else
+ {
+ title = "Partial Camera Script Success";
+ message = "The script appears to work, but no snapshot was found in the target folder. This is OK if you are leaving images on your DSLR's internal memory. Otherwise this could be a problem.";
+ message_type = "warning";
+ hide = false;
+ }
+ }
+ var success_options = {
+ title: title,
+ text: message,
+ type: message_type,
+ hide: hide,
+ addclass: "octolapse"
+ };
+ Octolapse.displayPopupForKey(success_options, "camera_script_test", ["camera_script_test"]);
+ }
+ else {
+ var fail_options = {
+ title: 'Camera Script Failed',
+ text: 'Errors were detected - ' + results.error,
+ type: 'error',
+ hide: false,
+ addclass: "octolapse"
+ };
+ Octolapse.displayPopupForKey(fail_options, "camera_script_test",["camera_script_test"]);
+ }
+ },
+ error: function (XMLHttpRequest, textStatus, errorThrown) {
+ var options = {
+ title: 'Camera Script Test Failed',
+ text: "Unable to perform the test, or an unexpected error occurred. Please check the log file for details. Status: " + textStatus + ". Error: " + errorThrown,
+ type: 'error',
+ hide: false,
+ addclass: "octolapse"
+ };
+ Octolapse.displayPopupForKey(options, "camera_script_test",["camera_script_test"]);
+ }
+ });
+ };
+
+ self.toggleCustomImagePreferences = function () {
if (self.enable_custom_image_preferences()) {
self.enable_custom_image_preferences(false);
- return;
}
-
- if (self.camera_stream_visible()) {
- self.enable_custom_image_preferences(true);
- $('#'+ id).prop("checked",true);
- return;
+ else {
+ self.tryEnableCustomImagePreferences();
}
- self.testCustomImagePreferences(self.enable_custom_image_preferences,id);
+ };
+ self.showWebcamSettings = function() {
+ var profile = self.toJS();
+ self.webcam_settings_popup.showWebcamSettingsForProfile(profile, function(webcam_settings) {
+ //console.log("Applying new settings to camera profile.");
+ if (webcam_settings)
+ {
+ profile.webcam_settings = webcam_settings;
+ self.webcam_settings.updateWebcamSettings(profile);
+ }
+ });
};
- self.testCustomImagePreferences = function(bool_observable, id){
+ self.tryEnableCustomImagePreferences = function(){
self.is_testing_custom_image_preferences(true);
// If no guid is supplied, this is a new profile. We will need to know that later when we push/update our observable array
//console.log("Running camera request.");
@@ -222,11 +302,10 @@ $(function() {
dataType: "json",
success: function (results) {
if (results.success){
- bool_observable(true);
- $('#'+ id).prop("checked",true);
- self.updateImagePreferencesFromServer(true);
+ self.enable_custom_image_preferences(true);
}
else {
+ self.enable_custom_image_preferences(false);
var options = {
title: 'Unable To Enable Custom Preferences',
text: results.error,
@@ -254,38 +333,44 @@ $(function() {
});
};
+ self.on_opened = function(dialog) {
+ //console.log("Opening camera profile");
+ self.is_dialog_open(true);
+ };
+
self.on_closed = function(){
//console.log("Closing camera profile");
- self.webcam_settings.setStreamVisibility(false);
+ self.is_dialog_open(false);
self.automatic_configuration.on_closed();
};
- self.on_cancelled = function(){
- //console.log("Cancelling camera profile");
- if(self.camera_type() == "webcam" && self.enable_custom_image_preferences()) {
- self.webcam_settings.cancelWebcamChanges();
- }
- };
-
self.updateFromServer = function(values) {
- self.guid(values.guid);
self.name(values.name);
self.enabled(values.enabled);
self.description(values.description);
self.camera_type(values.camera_type);
- //self.gcode_camera_script = ko.observable(values.gcode_camera_script);
+ self.on_before_snapshot_gcode = ko.observable(values.on_before_snapshot_gcode);
+ self.gcode_camera_script = ko.observable(values.gcode_camera_script);
+ self.on_after_snapshot_gcode = ko.observable(values.on_after_snapshot_gcode);
+ self.on_before_snapshot_gcode = ko.observable(values.on_before_snapshot_gcode);
self.enable_custom_image_preferences(values.enable_custom_image_preferences);
- self.on_print_start_script(values.on_print_start_script);
- self.on_before_snapshot_script(values.on_before_snapshot_script);
- //self.external_camera_snapshot_script = ko.observable(values.external_camera_snapshot_script);
- //self.on_after_snapshot_script = ko.observable(values.on_after_snapshot_script);
- //self.on_before_render_script = ko.observable(values.on_before_render_script);
- //self.on_after_render_script = ko.observable(values.on_after_render_script);
self.delay(values.delay);
self.timeout_ms(values.timeout_ms);
self.apply_settings_before_print(values.apply_settings_before_print);
self.apply_settings_at_startup(values.apply_settings_at_startup);
self.snapshot_transpose(values.snapshot_transpose);
+ if (typeof values.apply_settings_when_disabled != 'undefined')
+ {
+ self.apply_settings_when_disabled(values.apply_settings_when_disabled);
+ }
+ // Clear any settings that we don't want to update, unless they aren't important.
+ self.on_print_start_script("");
+ self.on_before_snapshot_script("");
+ self.external_camera_snapshot_script("");
+ self.on_after_snapshot_script("");
+ self.on_before_render_script("");
+ self.on_after_render_script("");
+ self.on_print_end_script("");
self.webcam_settings.updateWebcamSettings(values);
};
@@ -302,8 +387,11 @@ $(function() {
// need to remove the parent link from the automatic configuration to prevent a cyclic copy
var parent = self.automatic_configuration.parent;
self.automatic_configuration.parent = null;
+ var webcam_settings_popup = self.webcam_settings_popup;
+ self.webcam_settings_popup = null;
var copy = ko.toJS(self);
self.automatic_configuration.parent = parent;
+ self.webcam_settings_popup = webcam_settings_popup;
return copy;
};
@@ -312,90 +400,18 @@ $(function() {
Octolapse.Cameras.setIsClickable(!value);
});
- self.updateImagePreferencesFromServer = function(replace) {
- self.webcam_settings.getMjpgStreamerControls(replace, function (results) {
- // Update the current settings that we just received
- self.webcam_settings.updateWebcamSettings(results.settings);
- if (results.settings.new_preferences_available) {
- // If new settings are available, offer to update them, but don't do it automatically
- var message = "Octolapse has detected new camera preferences from your " +
- "streaming server. Do you want to overwrite your current image preferences?";
- Octolapse.showConfirmDialog(
- "replace-image-preferences",
- "New Image Preferences Available",
- message,
- function () {
- self.updateImagePreferencesFromServer(true, function (results) {
- self.webcam_settings.updateWebcamSettings(results.settings);
- });
- }
- );
- }
- }, function(results){
- self.enable_custom_image_preferences(false);
- var message = "There was a problem retrieving webcam settings from the server.";
- if (results && results.error)
- message = message + " Details: " + results.error;
- var options = {
- title: 'Webcam Settings Error',
- text: message,
- type: 'error',
- hide: false,
- addclass: "octolapse"
- };
-
- Octolapse.displayPopupForKey(options, "webcam_settings_error",["webcam_settings_error"]);
- });
- };
-
- self.on_opened = function() {
- console.log("Opening camera profile");
- if (self.enable_custom_image_preferences())
- self.updateImagePreferencesFromServer(false);
- };
-
// update the webcam settings
self.webcam_settings.updateWebcamSettings(values);
-
- // Now that the webcam settings are updated, subscribe to address changes
- // so we can update the streaming server controls
- self.webcam_settings.address.subscribe(function(newValue){
- if(self.enable_custom_image_preferences)
- self.updateImagePreferencesFromServer(true);
- });
};
Octolapse.CameraProfileValidationRules = {
rules: {
- camera_type: { required: true },
- exposure_type: { required: true },
- led_1_mode: { required: true},
- powerline_frequency: { required: true},
- snapshot_request_template: { octolapseSnapshotTemplate: true },
- stream_template: { octolapseSnapshotTemplate: true },
- brightness_request_template: { octolapseCameraRequestTemplate: true },
- contrast_request_template: { octolapseCameraRequestTemplate: true },
- saturation_request_template: { octolapseCameraRequestTemplate: true },
- white_balance_auto_request_template: { octolapseCameraRequestTemplate: true },
- gain_request_template: { octolapseCameraRequestTemplate: true },
- powerline_frequency_request_template: { octolapseCameraRequestTemplate: true },
- white_balance_temperature_request_template: { octolapseCameraRequestTemplate: true },
- sharpness_request_template: { octolapseCameraRequestTemplate: true },
- backlight_compensation_enabled_request_template: { octolapseCameraRequestTemplate: true },
- exposure_type_request_template: { octolapseCameraRequestTemplate: true },
- exposure_request_template: { octolapseCameraRequestTemplate: true },
- exposure_auto_priority_enabled_request_template: { octolapseCameraRequestTemplate: true },
- pan_request_template: { octolapseCameraRequestTemplate: true },
- tilt_request_template: { octolapseCameraRequestTemplate: true },
- autofocus_enabled_request_template: { octolapseCameraRequestTemplate: true },
- focus_request_template: { octolapseCameraRequestTemplate: true },
- zoom_request_template: { octolapseCameraRequestTemplate: true },
- led1_mode_request_template: { octolapseCameraRequestTemplate: true },
- led1_frequency_request_template: { octolapseCameraRequestTemplate: true },
- jpeg_quality_request_template: { octolapseCameraRequestTemplate: true }
+ octolapse_camera_camera_type: { required: true },
+ octolapse_camera_snapshot_request_template: { octolapseSnapshotTemplate: true },
+ octolapse_camera_stream_template: { octolapseSnapshotTemplate: true },
},
messages: {
- name: "Please enter a name for your profile"
+ octolapse_camera_name: "Please enter a name for your profile"
}
};
diff --git a/octoprint_octolapse/static/js/octolapse.profiles.camera.webcam.js b/octoprint_octolapse/static/js/octolapse.profiles.camera.webcam.js
index 37fbe63b..ed4aeb66 100644
--- a/octoprint_octolapse/static/js/octolapse.profiles.camera.webcam.js
+++ b/octoprint_octolapse/static/js/octolapse.profiles.camera.webcam.js
@@ -1,7 +1,7 @@
/*
##################################################################################
# Octolapse - A plugin for OctoPrint used for making stabilized timelapse videos.
-# Copyright (C) 2019 Brad Hochgesang
+# Copyright (C) 2023 Brad Hochgesang
##################################################################################
# This program is free software: you can redistribute it and/or modify
# it under the terms of the GNU Affero General Public License as published
@@ -22,7 +22,7 @@
##################################################################################
*/
$(function() {
- ko.subscribable.fn.subscribeWithTarget = function (handler, target) {
+ ko.subscribable.fn.octolapseSubscriptWithTarget = function (handler, target) {
var self = this;
var _oldValue;
self.before_change_subscription = this.subscribe(function (oldValue) {
@@ -40,11 +40,21 @@ $(function() {
return self;
};
- Octolapse.WebcamSettingsPopupViewModel = function (values) {
+ Octolapse.WebcamSettingsPopupViewModel = function (id) {
var self = this;
+ self.id = id;
+ self.selector = "#" + id;
+ self.loading_selector = self.selector + ' div.webcam_settings_preview div.loading';
+ self.error_selector = self.selector + ' div.webcam_settings_preview div.error';
+ self.dialog = {};
+
self.closeWebcamSettingsDialog = function() {
self.can_hide = true;
- $("#octolapse_webcam_settings_dialog").modal("hide");
+ if (self.dialog.$webcamSettingsDialog)
+ {
+ self.dialog.$webcamSettingsDialog.modal("hide");
+ }
+
};
// variable to hold the custom webcam image preferences
@@ -52,57 +62,74 @@ $(function() {
self.can_hide = false;
- self.openWebcamSettingsDialog = function(){
- var dialog = this;
+ self.openWebcamSettingsDialog = function(on_closed){
+ self.dialog = {};
+ self.on_closed_callback = on_closed;
+ // Set close callback
+ self.dialog.on_closed = function(send_settings) {
+ if (self.on_closed_callback)
+ {
+ var settings = null;
+ if (send_settings) {
+ settings = ko.toJS(self.webcam_settings);
+ }
+ self.on_closed_callback(settings);
+ }
+ self.closeWebcamSettingsDialog();
+ };
// Show the settings dialog
- dialog.$webcamSettingsDialog = $("#octolapse_webcam_settings_dialog");
- dialog.$webcamSettingsForm = dialog.$webcamSettingsDialog.find("#octolapse_webcam_settings_popup_form");
- dialog.$webcamStreamImg = dialog.$webcamSettingsDialog.find("#octolapse_webcam_settings_stream");
- dialog.$cancelButton = $(".cancel", dialog.$webcamSettingsDialog);
- dialog.$closeIcon = $("a.close", dialog.$webcamSettingsDialog);
- dialog.$saveButton = $(".save", dialog.$webcamSettingsDialog);
- dialog.$defaultButton = $(".set-defaults", dialog.$webcamSettingsDialog);
- dialog.$modalBody = dialog.$webcamSettingsDialog.find(".modal-body");
- dialog.$modalHeader = dialog.$webcamSettingsDialog.find(".modal-header");
- dialog.$modalFooter = dialog.$webcamSettingsDialog.find(".modal-footer");
- dialog.$cancelButton.unbind("click");
+ self.dialog.$webcamSettingsDialog = $(self.selector);
+ self.dialog.$cancelButton = $(".cancel", self.dialog.$webcamSettingsDialog);
+ self.dialog.$closeIcon = $("a.close", self.dialog.$webcamSettingsDialog);
+ self.dialog.$saveButton = $(".save", self.dialog.$webcamSettingsDialog);
+ self.dialog.$defaultButton = $(".set-defaults", self.dialog.$webcamSettingsDialog);
+ self.dialog.$modalBody = self.dialog.$webcamSettingsDialog.find(".modal-body");
+ self.dialog.$modalHeader = self.dialog.$webcamSettingsDialog.find(".modal-header");
+ self.dialog.$modalFooter = self.dialog.$webcamSettingsDialog.find(".modal-footer");
+ self.dialog.$cancelButton.unbind("click");
// Called when the user clicks the cancel button in any add/update dialog
- dialog.$cancelButton.bind("click", self.webcam_settings.cancelWebcamChanges);
- dialog.$closeIcon.unbind("click");
- dialog.$closeIcon.bind("click", self.webcam_settings.cancelWebcamChanges);
+ self.dialog.$cancelButton.bind("click", function() {
+ self.webcam_settings.cancelWebcamChanges(self.dialog.on_closed);
+ });
+ self.dialog.$closeIcon.unbind("click");
+ self.dialog.$closeIcon.bind("click", function() {
+ self.webcam_settings.cancelWebcamChanges(self.dialog.on_closed);
+ });
- dialog.$saveButton.unbind("click");
+ self.dialog.$saveButton.unbind("click");
// Called when the user clicks the cancel button in any add/update dialog
- dialog.$saveButton.bind("click", function () {
+ self.dialog.$saveButton.bind("click", function () {
// Save the settings.
- self.saveWebcamSettings();
+ if (self.on_closed_callback) {
+ self.dialog.on_closed(true);
+ }
+ else
+ {
+ self.saveWebcamSettings();
+ }
});
- dialog.$defaultButton.unbind("click");
+ self.dialog.$defaultButton.unbind("click");
// Called when the user clicks the cancel button in any add/update dialog
- dialog.$defaultButton.bind("click", function () {
+ self.dialog.$defaultButton.bind("click", function () {
// Hide the dialog
self.webcam_settings.restoreWebcamDefaults();
});
// Prevent hiding unless the event was initiated by the hideAddEditDialog function
- dialog.$webcamSettingsDialog.on("hide.bs.modal", function () {
- console.log("Hiding webcam settings dialog");
+ self.dialog.$webcamSettingsDialog.on("hide.bs.modal", function () {
+ //console.log("Hiding webcam settings dialog");
if (!self.can_hide)
return false;
// Clear out error summary
self.webcam_settings.setStreamVisibility(false);
});
- dialog.$webcamSettingsDialog.on("show.bs.modal", function () {
-
- });
-
- dialog.$webcamSettingsDialog.on("shown.bs.modal", function () {
+ self.dialog.$webcamSettingsDialog.on("shown.bs.modal", function () {
self.can_hide = false;
self.webcam_settings.setStreamVisibility(true);
- dialog.$webcamSettingsDialog.css({
+ self.dialog.$webcamSettingsDialog.css({
width: '940px',
'margin-left': function () {
return -($(this).width() / 2);
@@ -110,11 +137,11 @@ $(function() {
});
});
- dialog.$webcamSettingsDialog.modal({
+ self.dialog.$webcamSettingsDialog.modal({
backdrop: 'static',
maxHeight: function() {
return Math.max(
- window.innerHeight - dialog.$modalHeader.innerHeight()-dialog.$modalFooter.innerHeight()-30,
+ window.innerHeight - self.dialog.$modalHeader.innerHeight()-self.dialog.$modalFooter.innerHeight()-30,
200
);
}
@@ -163,22 +190,39 @@ $(function() {
});
};
- self.canEditSettings = ko.pureComputed(function(){
- // Get the current camera profile
- var current_camera = Octolapse.Status.getCurrentProfileByGuid(Octolapse.Status.profiles().cameras(),Octolapse.Status.current_camera_guid());
- if (current_camera != null)
+ self.showWebcamSettingsForProfile = function(profile, on_preferences_changed) {
+ // First update the current webcam_settings based on the current profile
+ self.webcam_settings.updateWebcamSettings(profile);
+
+ self.webcam_settings.getMjpgStreamerControls(false, function (results) {
+ // Update the current settings that we just received
+ if (results.settings.new_preferences_available)
{
- return current_camera.enable_custom_image_preferences;
+ self.webcam_settings.updateWebcamSettings(results.settings);
}
- return false;
- });
- self.showWebcamSettings = function() {
+ self.openWebcamSettingsDialog(on_preferences_changed);
+ }, function(results){
+ var message = "There was a problem retrieving webcam settings from the server.";
+ if (results && results.error)
+ message = message + " Details: " + results.error;
+ var options = {
+ title: 'Webcam Settings Error',
+ text: message,
+ type: 'error',
+ hide: false,
+ addclass: "octolapse"
+ };
+ Octolapse.displayPopupForKey(options, "webcam_settings_error",["webcam_settings_error"]);
+ });
+ };
+
+ self.showWebcamSettingsForGuid = function(guid) {
// Load the current webcam settings
// On success, show the dialog
// If no guid is supplied, this is a new profile. We will need to know that later when we push/update our observable array
var data = {
- 'guid': Octolapse.Status.current_camera_guid(),
+ 'guid': guid,
'replace': false
};
self.webcam_settings.getImagePreferences(data, function (results) {
@@ -195,7 +239,7 @@ $(function() {
message,
function () {
data = {
- 'guid': Octolapse.Status.current_camera_guid(),
+ 'guid': self.webcam_settings.guid(),
'replace': true
};
self.webcam_settings.getImagePreferences(data, function (results) {
@@ -217,7 +261,7 @@ $(function() {
};
Octolapse.displayPopupForKey(options,"webcam_settings_error",["webcam_settings_error"]);
});
- }
+ };
};
Octolapse.WebcamSettingsViewModel = function (close_callback) {
@@ -236,6 +280,7 @@ $(function() {
self.timeout_ms = ko.observable();
self.server_type = ko.observable();
self.type = ko.observable();
+ self.stream_download = ko.observable();
self.mjpg_streamer = new Octolapse.MjpgStreamerViewModel();
self.use_custom_webcam_settings_page = ko.observable();
self.webcam_two_column_view = ko.observable(Octolapse.getLocalStorage("webcam_two_column_view") || false);
@@ -243,7 +288,7 @@ $(function() {
self.toggleColumns = function(){
var two_column_view = !self.webcam_two_column_view();
self.webcam_two_column_view(two_column_view);
- console.log("Setting two column view.");
+ //console.log("Setting two column view.");
Octolapse.setLocalStorage("webcam_two_column_view", two_column_view);
};
@@ -274,14 +319,7 @@ $(function() {
if (!self.server_type() || !self.address())
return;
var data = {
- "guid": self.guid(),
- "server_type": self.server_type(),
- "camera_name": self.name() ? self.name() : "unknown",
- "address": self.address(),
- "username": self.username() ? self.username() : "",
- "password": self.password() ? self.password() : "",
- "ignore_ssl_error": self.ignore_ssl_error() ? self.ignore_ssl_error() : false,
- "replace": replace
+ "profile": ko.toJS(self)
};
$.ajax({
@@ -301,9 +339,6 @@ $(function() {
}
},
error: function (XMLHttpRequest, textStatus, errorThrown) {
-
- //if(self.close_callback)
- // self.close_callback();
error_callback();
}
});
@@ -315,11 +350,11 @@ $(function() {
return "Switch to Default Page";
}
else{
- return "Check for Custom Page";
+ return "Switch to Custom Page";
}
});
- self.toggleCustomCameraSettingsPage = function(){
+ self.toggleCustomCameraSettingsPage = function(prevent_errors, force_custom){
// fetch control settings from the server
if (!self.server_type() || !self.address())
{
@@ -375,7 +410,7 @@ $(function() {
return;
}
// set our camera type info
- var use_custom_webcam_settings_page = !self.use_custom_webcam_settings_page();
+ var use_custom_webcam_settings_page = !self.use_custom_webcam_settings_page() || force_custom;
if(!results.type)
use_custom_webcam_settings_page = false;
data = {
@@ -390,38 +425,44 @@ $(function() {
self.updateWebcamSettings(data);
// We meed to rebind the help links here, else they will not show up.
Octolapse.Help.bindHelpLinks(".octolapse .webcam_settings");
- var message;
- var title = "Webcam type found!";
- var type = "success";
- if (!results.type) {
- message = "This webcam does not currently support a custom camera control page.";
- title = 'Unknown webcam';
- type = "error";
- }
- else if (!use_custom_webcam_settings_page)
- {
- message = "Successfully switched to the default mjpg-streamer control page.";
- }
- var options = {
+ if (!prevent_errors) {
+ var message;
+ var title = "Webcam type found!";
+ var type = "success";
+ if (!results.type) {
+ message = "There is no custom control for your webcam model at the moment!";
+ title = 'Unknown webcam';
+ type = "error";
+ } else if (!use_custom_webcam_settings_page) {
+ title = "Changed to Default View";
+ message = "Successfully switched to the default mjpg-streamer control page.";
+ } else {
+ title = "Webcam type found!";
+ message = "A custom image preference control page exists for this camera!.";
+ }
+ var options = {
title: title,
text: message,
type: type,
hide: true,
addclass: "octolapse"
};
- Octolapse.displayPopupForKey(options, "camera-detected",["camera-detected"]);
+ Octolapse.displayPopupForKey(options, "camera-detected", ["camera-detected"]);
+ }
return;
},
error: function (XMLHttpRequest, textStatus, errorThrown) {
- var options = {
- title: 'Unknown Camera Type',
- text: "Status: " + textStatus + ". Error: " + errorThrown,
- type: 'error',
- hide: false,
- addclass: "octolapse"
- };
self.type(null);
- Octolapse.displayPopupForKey(options,"camera_settings_error",["camera_settings_error"]);
+ if (!prevent_errors) {
+ var options = {
+ title: 'Unknown Camera Type',
+ text: "Status: " + textStatus + ". Error: " + errorThrown,
+ type: 'error',
+ hide: false,
+ addclass: "octolapse"
+ };
+ Octolapse.displayPopupForKey(options,"camera_settings_error",["camera_settings_error"]);
+ }
}
});
};
@@ -450,7 +491,7 @@ $(function() {
else
value = 'webcam-other-template';
- return value
+ return value;
});
self.get_webcam_data = ko.pureComputed(function(){
@@ -466,7 +507,7 @@ $(function() {
self.stream_url = ko.pureComputed(function(){
if(!self.camera_stream_visible())
return '';
- console.log("Calculating stream url.");
+ //console.log("Calculating stream url.");
var url = self.stream_template();
if (url != "")
url = url.replace("{camera_address}", self.address());
@@ -474,9 +515,16 @@ $(function() {
},this);
self.setStreamVisibility = function(value){
- console.log("Attempting to stop the camera stream");
- self.camera_stream_visible(value);
- self.stream_url();
+ if (self.camera_stream_visible() != value) {
+ if (value){
+ //console.log("Attempting to start the camera stream");
+ }
+ else{
+ //console.log("Attempting to stop the camera stream");
+ }
+ self.camera_stream_visible(value);
+ //self.stream_url();
+ }
};
self.subscriptions = [];
@@ -491,10 +539,11 @@ $(function() {
};
self.subscribe_to_mjpg_streamer_changes = function() {
+ self.unsubscribe_to_settings_changes();
for(var index = 0; index < self.mjpg_streamer.controls().length; index++)
{
var control = self.mjpg_streamer.controls()[index];
- self.subscriptions.push(control.value.subscribeWithTarget(function (target, oldValue, newValue) {
+ self.subscriptions.push(control.value.octolapseSubscriptWithTarget(function (target, oldValue, newValue) {
if (oldValue !== newValue)
{
self.applyWebcamSetting(ko.toJS(target));
@@ -512,9 +561,9 @@ $(function() {
};
// I found this awesome binding handler created by Michael Rouse, available at https://codepen.io/mwrouse/pen/wWwvmN
- self.cancelWebcamChanges = function(){
- if (self.guid() == null || self.guid() == "")
- self.close_callback();
+ self.cancelWebcamChanges = function(on_closed_callback){
+ //if (on_closed_callback && (self.guid() == null || self.guid() == ""))
+ // on_closed_callback(ko.toJS(self));
//console.log("Undoing webcam changes.");
// If no guid is supplied, this is a new profile. We will need to know that later when we push/update our observable array
@@ -541,8 +590,8 @@ $(function() {
Octolapse.displayPopupForKey(options, "camera_settings_error",["camera_settings_error"]);
}
- if(self.close_callback)
- self.close_callback();
+ if (on_closed_callback)
+ on_closed_callback(false);
},
error: function (XMLHttpRequest, textStatus, errorThrown) {
var options = {
@@ -553,8 +602,8 @@ $(function() {
addclass: "octolapse"
};
Octolapse.displayPopupForKey(options,"camera_settings_error",["camera_settings_error"]);
- if(self.close_callback)
- self.close_callback();
+ if (on_closed_callback)
+ on_closed_callback(true);
}
});
};
@@ -638,8 +687,12 @@ $(function() {
self.name(values.name);
if ("address" in webcam_settings)
self.address(webcam_settings.address);
- if ('snapshot_request_template' in webcam_settings)
+ if (
+ 'snapshot_request_template' in webcam_settings &&
+ self.snapshot_request_template() != webcam_settings.snapshot_request_template
+ ) {
self.snapshot_request_template(webcam_settings.snapshot_request_template);
+ }
if ("username" in webcam_settings)
self.username(webcam_settings.username);
if ("password" in webcam_settings)
@@ -655,6 +708,9 @@ $(function() {
self.type(webcam_settings.type);
}
+ if ("stream_download" in webcam_settings)
+ self.stream_download(webcam_settings.stream_download);
+
if("use_custom_webcam_settings_page" in webcam_settings)
{
self.use_custom_webcam_settings_page(webcam_settings.use_custom_webcam_settings_page);
@@ -665,7 +721,7 @@ $(function() {
self.mjpg_streamer.update(webcam_settings.mjpg_streamer, self.type(), self.use_custom_webcam_settings_page());
}
// notify subscribers of a possible stream url change.
- self.stream_url.notifySubscribers();
+ //self.stream_url.notifySubscribers();
// restore the webcam settings template so that the custom controls show
self.restore_webcam_settings_template();
setTimeout(function(){
@@ -760,7 +816,8 @@ $(function() {
};
self.previewStabilization = function() {
- var message = "Make sure your bed is clear, and that your 'Home Axis Gcode Script' \
+ var message = "Your extruder will be moved to the selected stabilization position. \
+ Make sure your bed is clear, and that your 'Home Axis Gcode Script' \
is correct before attempting to preview the stabilization point. \
Are you sure you want to continue?";
Octolapse.showConfirmDialog("preview-stabilization", "Preview Stabilization", message, function(){
@@ -795,5 +852,5 @@ $(function() {
},null);
};
- }
+ };
});
diff --git a/octoprint_octolapse/static/js/octolapse.profiles.camera.webcam.mjpg_streamer.js b/octoprint_octolapse/static/js/octolapse.profiles.camera.webcam.mjpg_streamer.js
index 4e72707a..72327943 100644
--- a/octoprint_octolapse/static/js/octolapse.profiles.camera.webcam.mjpg_streamer.js
+++ b/octoprint_octolapse/static/js/octolapse.profiles.camera.webcam.mjpg_streamer.js
@@ -1,7 +1,7 @@
/*
##################################################################################
# Octolapse - A plugin for OctoPrint used for making stabilized timelapse videos.
-# Copyright (C) 2019 Brad Hochgesang
+# Copyright (C) 2023 Brad Hochgesang
##################################################################################
# This program is free software: you can redistribute it and/or modify
# it under the terms of the GNU Affero General Public License as published
@@ -82,7 +82,7 @@ $(function() {
self.value("1");
else
self.value("0");
- })
+ });
}
self.help_url = ko.pureComputed(function() {
@@ -99,7 +99,7 @@ $(function() {
self.checkbox_title = ko.pureComputed(function() {
return "Enable or disable " + self.name() + ".";
- })
+ });
};
@@ -130,7 +130,7 @@ $(function() {
self.update = function(values, type, use_custom_webcam_settings_page) {
if (!values)
return;
- self.controls([]);
+ var controls = [];
self.data.controls_dict = {};
// return if we have no controls
if (!values.controls)
@@ -147,10 +147,10 @@ $(function() {
var control = new Octolapse.MjpgStreamerControlViewModel(sortedControls[index]);
if ("id" in control) {
self.data.controls_dict[control.id()] = control;
- self.controls.push(control);
+ controls.push(control);
}
}
-
+ self.controls(controls);
self.bind_viewmodel_for_camera_type();
};
diff --git a/octoprint_octolapse/static/js/octolapse.profiles.js b/octoprint_octolapse/static/js/octolapse.profiles.js
index 60c2e2ae..ab26076e 100644
--- a/octoprint_octolapse/static/js/octolapse.profiles.js
+++ b/octoprint_octolapse/static/js/octolapse.profiles.js
@@ -1,7 +1,7 @@
/*
##################################################################################
# Octolapse - A plugin for OctoPrint used for making stabilized timelapse videos.
-# Copyright (C) 2017 Brad Hochgesang
+# Copyright (C) 2023 Brad Hochgesang
##################################################################################
# This program is free software: you can redistribute it and/or modify
# it under the terms of the GNU Affero General Public License as published
@@ -63,7 +63,7 @@ $(function() {
});
// Created a sorted observable
- self.profiles_sorted = ko.computed(function() { return Octolapse.observableNameSort(self.profiles) });
+ self.profiles_sorted = ko.computed(function() { return Octolapse.observableNameSort(self.profiles); });
/*
Octoprint Viewmodel Events
@@ -121,7 +121,8 @@ $(function() {
hide: false,
addclass: "octolapse",
desktop: {
- desktop: true
+ desktop: false,
+ icon: null
}
};
Octolapse.displayPopup(options);
@@ -130,7 +131,7 @@ $(function() {
};
//Remove an existing profile from the server settings, then if successful remove it from the observable array.
self.removeProfile = function (guid) {
- var currentProfile = self.getProfileByGuid(guid)
+ var currentProfile = self.getProfileByGuid(guid);
if (confirm("Are you sure you want to permanently erase the profile:'" + currentProfile.name() + "'?")) {
var data = { "client_id": Octolapse.Globals.client_id,'guid': ko.toJS(guid), 'profileType': self.profileTypeName() };
$.ajax({
@@ -151,7 +152,7 @@ $(function() {
hide: false,
addclass: "octolapse",
desktop: {
- desktop: true
+ desktop: false
}
};
Octolapse.displayPopup(options);
@@ -166,7 +167,7 @@ $(function() {
hide: false,
addclass: "octolapse",
desktop: {
- desktop: true
+ desktop: false
}
};
Octolapse.displayPopup(options);
@@ -199,7 +200,7 @@ $(function() {
hide: false,
addclass: "octolapse",
desktop: {
- desktop: true
+ desktop: false
}
};
Octolapse.displayPopup(options);
@@ -213,7 +214,7 @@ $(function() {
hide: false,
addclass: "octolapse",
desktop: {
- desktop: true
+ desktop: false
}
};
Octolapse.displayPopup(options);
@@ -232,7 +233,7 @@ $(function() {
newProfile = new self.profileViewModelCreate(ko.toJS(self.default_profile())); // Create our profile viewmodel
}
else {
- var current_profile = ko.toJS(self.getProfileByGuid(guid))
+ var current_profile = ko.toJS(self.getProfileByGuid(guid));
if(current_profile == null)
return null;
@@ -246,7 +247,7 @@ $(function() {
var index = Octolapse.arrayFirstIndexOf(self.profiles(),
function(item) {
var itemGuid = item.guid();
- return itemGuid === guid
+ return itemGuid === guid;
}
);
if (index < 0) {
@@ -258,7 +259,7 @@ $(function() {
hide: false,
addclass: "octolapse",
desktop: {
- desktop: true
+ desktop: false
}
};
Octolapse.displayPopup(options);
@@ -274,7 +275,7 @@ $(function() {
var itemGuid = item.guid();
var matchFound = itemGuid === guid;
if (matchFound)
- return matchFound
+ return matchFound;
}
);
if (index < 0) {
@@ -332,9 +333,9 @@ $(function() {
warning = null;
if(Octolapse.Status.is_timelapse_active())
{
- if(newProfile.profileTypeName() == 'Debug')
+ if(newProfile.profileTypeName() == 'Logging')
{
- warning = "A timelapse is active. All debug settings will IMMEDIATELY take effect, except for 'Test Mode' which will not take effect until the next print.";
+ warning = "A timelapse is active. All logging settings will IMMEDIATELY take effect.";
}
else
warning = "A timelapse is active. Any changes made here will NOT take effect until the next print.";
diff --git a/octoprint_octolapse/static/js/octolapse.profiles.library.js b/octoprint_octolapse/static/js/octolapse.profiles.library.js
index 0574d932..e854bcab 100644
--- a/octoprint_octolapse/static/js/octolapse.profiles.library.js
+++ b/octoprint_octolapse/static/js/octolapse.profiles.library.js
@@ -1,7 +1,7 @@
/*
##################################################################################
# Octolapse - A plugin for OctoPrint used for making stabilized timelapse videos.
-# Copyright (C) 2017 Brad Hochgesang
+# Copyright (C) 2023 Brad Hochgesang
##################################################################################
# This program is free software: you can redistribute it and/or modify
# it under the terms of the GNU Affero General Public License as published
@@ -26,6 +26,7 @@ $(function() {
values, profiles, profile_type, parent, update_callback
){
var self = this;
+ self.options_caption = "Not Selected";
self.is_initialized = false;
// Available profile and key information
if (profiles)
@@ -48,7 +49,7 @@ $(function() {
var key_value;
var has_null_value = false;
if (!values.key_values || !values.key_values[index] || has_null_value) {
- key_value = {name: "Select Profile", value: "null"};
+ key_value = {name: self.options_caption, value: "null"};
has_null_value = true;
}
else
@@ -183,7 +184,8 @@ $(function() {
self.is_confirming(false);
}
},
- on_complete: function (newValue, oldValue, wasConfirmed, wasIgnored,) {
+ on_complete: function (newValue, oldValue, wasConfirmed, wasIgnored) {
+ // Todo: What is wasIgnored doing here? Probably need to deal with it.
// we don't want to do anything if we're ignoring key changes
if (self.ignore_key_change)
return;
@@ -232,7 +234,7 @@ $(function() {
return {
"name": option.name,
"value": key
- }
+ };
};
self.updateKeyValuesForIndexedKey = function(indexed_key) {
@@ -245,12 +247,14 @@ $(function() {
// first we have to find this object from the options
var index = self.getIndexFromIndexedKey(indexed_key);
var option = self.getOptionForIndexedKey(indexed_key);
+ if (!option)
+ return;
var key = self.getKeyFromIndexedKey(indexed_key);
var option_value;
if (key == "null")
{
option_value = {
- "name": "Select a value",
+ "name": self.options_caption,
"value": "null"
};
}
@@ -303,7 +307,7 @@ $(function() {
if (current_option_value) {
var key = self.getKeyFromIndexedKey(current_option_value);
if (!(key in current_parent.values)) {
- options.unshift(self.createIndexedOption("Select a value","null", key_index));
+ options.unshift(self.createIndexedOption(self.options_caption,"null", key_index));
return;
}
current_parent = current_parent.values[key];
@@ -329,9 +333,9 @@ $(function() {
options.push(self.createIndexedOption(self.original_key[index],self.original_key[index], key_index));
}
options.sort(function(left, right) {
- return left.name == right.name ? 0 : (left.name < right.name ? -1 : 1)
+ return left.name == right.name ? 0 : (left.name < right.name ? -1 : 1);
});
- options.unshift(self.createIndexedOption("Select a value","null", key_index));
+ options.unshift(self.createIndexedOption(self.options_caption,"null", key_index));
self.ignore_key_change = false;
};
@@ -352,7 +356,7 @@ $(function() {
if (prevent_update && index == self.available_keys.length-1)
self.ignore_key_change = true;
if (index < keys.length){
- var indexed_key_value = {name:"Select a value", value: "0-null"};
+ var indexed_key_value = {name:self.options_caption, value: "0-null"};
if (keys[index])
indexed_key_value = self.createIndexedKey(keys[index].value, index);
self.key_values_with_index()[index](indexed_key_value);
@@ -466,7 +470,7 @@ $(function() {
hide: false,
addclass: "octolapse",
desktop: {
- desktop: true
+ desktop: false
}
};
Octolapse.displayPopupForKey(
@@ -499,7 +503,7 @@ $(function() {
hide: true,
addclass: "octolapse",
desktop: {
- desktop: true
+ desktop: false
}
};
Octolapse.displayPopupForKey(
@@ -519,7 +523,7 @@ $(function() {
hide: false,
addclass: "octolapse",
desktop: {
- desktop: true
+ desktop: false
}
};
Octolapse.displayPopupForKey(
diff --git a/octoprint_octolapse/static/js/octolapse.profiles.debug.js b/octoprint_octolapse/static/js/octolapse.profiles.logging.js
similarity index 51%
rename from octoprint_octolapse/static/js/octolapse.profiles.debug.js
rename to octoprint_octolapse/static/js/octolapse.profiles.logging.js
index 9377d667..311ec693 100644
--- a/octoprint_octolapse/static/js/octolapse.profiles.debug.js
+++ b/octoprint_octolapse/static/js/octolapse.profiles.logging.js
@@ -1,7 +1,7 @@
/*
##################################################################################
# Octolapse - A plugin for OctoPrint used for making stabilized timelapse videos.
-# Copyright (C) 2017 Brad Hochgesang
+# Copyright (C) 2023 Brad Hochgesang
##################################################################################
# This program is free software: you can redistribute it and/or modify
# it under the terms of the GNU Affero General Public License as published
@@ -21,32 +21,28 @@
# following email address: FormerLurker@pm.me
##################################################################################
*/
-$(function() {
- Octolapse.DebugProfileViewModel = function (values) {
+$(function () {
+ Octolapse.LoggingProfileViewModel = function (values) {
var self = this;
- self.profileTypeName = ko.observable("Debug");
+ self.profileTypeName = ko.observable("Logging");
self.guid = ko.observable(values.guid);
self.name = ko.observable(values.name);
self.description = ko.observable(values.description);
self.enabled = ko.observable(values.enabled);
- self.is_test_mode = ko.observable(values.is_test_mode);
self.log_to_console = ko.observable(values.log_to_console);
self.log_all_errors = ko.observable(values.log_all_errors);
self.enabled_loggers = ko.observableArray();
- for (var index = 0; index < values.enabled_loggers.length; index++)
- {
+ for (var index = 0; index < values.enabled_loggers.length; index++) {
var curItem = values.enabled_loggers[index];
- self.enabled_loggers.push({'name':curItem.name, 'log_level':curItem.log_level});
+ self.enabled_loggers.push({'name': curItem.name, 'log_level': curItem.log_level});
}
self.logger_name_add = ko.observable();
self.logger_level_add = ko.observable();
self.default_log_level = values.default_log_level;
- self.get_enabled_logger_index_by_name = function (name)
- {
- for (var index = 0; index < self.enabled_loggers().length; index++)
- {
+ self.get_enabled_logger_index_by_name = function (name) {
+ for (var index = 0; index < self.enabled_loggers().length; index++) {
var logger = self.enabled_loggers()[index];
if (logger.name === name) {
return index;
@@ -54,15 +50,13 @@ $(function() {
}
return -1;
};
- self.available_loggers = ko.computed(function() {
+ self.available_loggers = ko.computed(function () {
var available_loggers = [];
- for (var logger_index = 0; logger_index < Octolapse.DebugProfiles.profileOptions.all_logger_names.length; logger_index++)
- {
- var logger_name = Octolapse.DebugProfiles.profileOptions.all_logger_names[logger_index];
+ for (var logger_index = 0; logger_index < Octolapse.LoggingProfiles.profileOptions.all_logger_names.length; logger_index++) {
+ var logger_name = Octolapse.LoggingProfiles.profileOptions.all_logger_names[logger_index];
var found_logger_index = self.get_enabled_logger_index_by_name(logger_name);
- if (found_logger_index === -1)
- {
- available_loggers.push({'name':logger_name, 'log_level': self.default_log_level});
+ if (found_logger_index === -1) {
+ available_loggers.push({'name': logger_name, 'log_level': self.default_log_level});
}
}
return available_loggers;
@@ -76,20 +70,20 @@ $(function() {
return leftName === rightName ? 0 : (leftName < rightName ? -1 : 1);
});
};
- self.available_loggers_sorted = ko.computed(function() {
- return self.loggerNameSort(self.available_loggers)
+ self.available_loggers_sorted = ko.computed(function () {
+ return self.loggerNameSort(self.available_loggers);
});
- self.removeLogger = function(logger) {
+ self.removeLogger = function (logger) {
//console.log("removing logger.");
self.enabled_loggers.remove(logger);
};
- self.addLogger = function() {
+ self.addLogger = function () {
//console.log("Adding logger");
var index = self.get_enabled_logger_index_by_name(self.logger_name_add());
if (index === -1) {
- self.enabled_loggers.push({'name':self.logger_name_add(),'log_level':self.logger_level_add()});
+ self.enabled_loggers.push({'name': self.logger_name_add(), 'log_level': self.logger_level_add()});
self.scrollToBottom();
}
};
@@ -97,38 +91,97 @@ $(function() {
// When adding loggers automatically scrolling to the bottom of the page
// makes the control much more user friendly if you want to add several loggers.
// TODO: Scroll down only the width of a new control, which will be necessary if we add more controls below the logger controls.
- self.scrollToBottom = function()
- {
- var debug_container = document.getElementById("octolapse_add_edit_profile_model_body");
- debug_container.scrollTop = debug_container.scrollHeight;
+ self.scrollToBottom = function () {
+ var logging_container = document.getElementById("octolapse_add_edit_profile_model_body");
+ logging_container.scrollTop = logging_container.scrollHeight;
};
-
- self.updateFromServer = function(values) {
- self.guid(values.guid);
+
+ self.updateFromServer = function (values) {
self.name(values.name);
self.description(values.description);
self.enabled(values.enabled);
- self.is_test_mode(values.is_test_mode);
self.log_to_console(values.log_to_console);
self.log_all_errors(values.log_all_errors);
self.enabled_loggers([]);
- for (var index = 0; index < values.enabled_loggers.length; index++)
- {
+ for (var index = 0; index < values.enabled_loggers.length; index++) {
var curItem = values.enabled_loggers[index];
- self.enabled_loggers.push({'name':curItem.name, 'log_level':curItem.log_level});
+ self.enabled_loggers.push({'name': curItem.name, 'log_level': curItem.log_level});
}
};
+ self.clearLog = function (clear_all) {
+ var title;
+ var message;
+ if (clear_all) {
+ title = "Clear All Logs";
+ message = "All octolapse log files will be cleared and deleted. Are you sure?";
+ } else {
+ title = "Clear Log";
+ message = "The most recent octolapse log file will be cleared. Are you sure?";
+ }
+ Octolapse.showConfirmDialog(
+ "clear_log",
+ title,
+ message,
+ function () {
+ if (clear_all) {
+ title = "Logs Cleared";
+ message = "All octolapse log files have been cleared.";
+ } else {
+ title = "Most Recent Log Cleared";
+ message = "The most recent octolapse log file has been cleared.";
+ }
+ var data = {
+ clear_all: clear_all
+ };
+ $.ajax({
+ url: "./plugin/octolapse/clearLog",
+ type: "POST",
+ data: JSON.stringify(data),
+ contentType: "application/json",
+ dataType: "json",
+ success: function (data) {
+ var options = {
+ title: title,
+ text: message,
+ type: 'success',
+ hide: true,
+ addclass: "octolapse",
+ desktop: {
+ desktop: false
+ }
+ };
+ Octolapse.displayPopupForKey(options, "log_file_cleared", "log_file_cleared");
+ },
+ error: function (XMLHttpRequest, textStatus, errorThrown) {
+ var message = "Unable to clear the log.:( Status: " + textStatus + ". Error: " + errorThrown;
+ var options = {
+ title: 'Clear Log Error',
+ text: message,
+ type: 'error',
+ hide: false,
+ addclass: "octolapse",
+ desktop: {
+ desktop: false
+ }
+ };
+ Octolapse.displayPopupForKey(options, "log_file_cleared", "log_file_cleared");
+ }
+ });
+ }
+ );
+
+ };
+
self.automatic_configuration = new Octolapse.ProfileLibraryViewModel(
values.automatic_configuration,
- Octolapse.DebugProfiles.profileOptions.server_profiles,
+ Octolapse.LoggingProfiles.profileOptions.server_profiles,
self.profileTypeName(),
self,
self.updateFromServer
);
- self.toJS = function()
- {
+ self.toJS = function () {
// need to remove the parent link from the automatic configuration to prevent a cyclic copy
var parent = self.automatic_configuration.parent;
self.automatic_configuration.parent = null;
@@ -136,17 +189,17 @@ $(function() {
self.automatic_configuration.parent = parent;
return copy;
};
- self.on_closed = function(){
+ self.on_closed = function () {
self.automatic_configuration.on_closed();
};
- self.automatic_configuration.is_confirming.subscribe(function(value){
+ self.automatic_configuration.is_confirming.subscribe(function (value) {
//console.log("IsClickable" + value.toString());
- Octolapse.DebugProfiles.setIsClickable(!value);
+ Octolapse.LoggingProfiles.setIsClickable(!value);
});
-
+
};
- Octolapse.DebugProfileValidationRules = {
+ Octolapse.LoggingProfileValidationRules = {
rules: {
name: "required"
},
diff --git a/octoprint_octolapse/static/js/octolapse.profiles.printer.js b/octoprint_octolapse/static/js/octolapse.profiles.printer.js
index 1f3d9c07..95f6c049 100644
--- a/octoprint_octolapse/static/js/octolapse.profiles.printer.js
+++ b/octoprint_octolapse/static/js/octolapse.profiles.printer.js
@@ -1,7 +1,7 @@
/*
##################################################################################
# Octolapse - A plugin for OctoPrint used for making stabilized timelapse videos.
-# Copyright (C) 2017 Brad Hochgesang
+# Copyright (C) 2023 Brad Hochgesang
##################################################################################
# This program is free software: you can redistribute it and/or modify
# it under the terms of the GNU Affero General Public License as published
@@ -24,78 +24,86 @@
$(function() {
Octolapse.PrinterProfileValidationRules = {
rules: {
- min_x: { lessThanOrEqual: "#octolapse_printer_max_x" },
- max_x: { greaterThanOrEqual: "#octolapse_printer_min_x"},
- min_y: { lessThanOrEqual: "#octolapse_printer_max_y" },
- max_y: { greaterThanOrEqual: "#octolapse_printer_min_y" },
- min_z: { lessThanOrEqual: "#octolapse_printer_max_z" },
- max_z: { greaterThanOrEqual: "#octolapse_printer_min_z" },
- snapshot_min_x: { lessThanOrEqual: "#octolapse_printer_snapshot_max_x" },
- snapshot_max_x: { greaterThanOrEqual: "#octolapse_printer_snapshot_min_x"},
- snapshot_min_y: { lessThanOrEqual: "#octolapse_printer_snapshot_max_y" },
- snapshot_max_y: { greaterThanOrEqual: "#octolapse_printer_snapshot_min_y" },
- snapshot_min_z: { lessThanOrEqual: "#octolapse_printer_snapshot_max_z" },
- snapshot_max_z: { greaterThanOrEqual: "#octolapse_printer_snapshot_min_z" },
- minimum_layer_height: { lessThanOrEqual: "#printer_profile_priming_height" },
- priming_height: { greaterThanOrEqual: "#printer_profile_minimum_layer_height" },
- auto_position_detection_commands: { csvString: true },
- printer_profile_other_slicer_retract_length: {required: true},
- printer_profile_slicer_other_z_hop: {required: true},
- slicer_cura_smooth_spiralized_contours: {ifCheckedEnsureNonNull: ["#slicer_cura_layer_height"] },
- slicer_other_vase_mode: {ifCheckedEnsureNonNull: ["#slicer_other_slicer_layer_height"] },
- slicer_simplify_3d_vase_mode: {ifCheckedEnsureNonNull: ["#slicer_simplify_3d_layer_height"] },
- slicer_slic3r_pe_vase_mode: {ifCheckedEnsureNonNull: ["#slicer_slic3r_pe_layer_height"] },
- slicer_cura_layer_height: {ifOtherCheckedEnsureNonNull: '#slicer_cura_smooth_spiralized_contours'},
- slicer_other_slicer_layer_height: {ifOtherCheckedEnsureNonNull: '#slicer_other_vase_mode'},
- slicer_simplify_3d_layer_height: {ifOtherCheckedEnsureNonNull: '#slicer_simplify_3d_vase_mode'},
- slicer_slic3r_pe_layer_height: {ifOtherCheckedEnsureNonNull: '#slicer_slic3r_pe_vase_mode'}
+ octolapse_printer_min_x: { lessThanOrEqual: "#octolapse_printer_max_x" },
+ octolapse_printer_max_x: { greaterThanOrEqual: "#octolapse_printer_min_x"},
+ octolapse_printer_min_y: { lessThanOrEqual: "#octolapse_printer_max_y" },
+ octolapse_printer_max_y: { greaterThanOrEqual: "#octolapse_printer_min_y" },
+ octolapse_printer_min_z: { lessThanOrEqual: "#octolapse_printer_max_z" },
+ octolapse_printer_max_z: { greaterThanOrEqual: "#octolapse_printer_min_z" },
+ octolapse_printer_snapshot_min_x: { lessThanOrEqual: "#octolapse_printer_snapshot_max_x" },
+ octolapse_printer_snapshot_max_x: { greaterThanOrEqual: "#octolapse_printer_snapshot_min_x"},
+ octolapse_printer_snapshot_min_y: { lessThanOrEqual: "#octolapse_printer_snapshot_max_y" },
+ octolapse_printer_snapshot_max_y: { greaterThanOrEqual: "#octolapse_printer_snapshot_min_y" },
+ octolapse_printer_snapshot_min_z: { lessThanOrEqual: "#octolapse_printer_snapshot_max_z" },
+ octolapse_printer_snapshot_max_z: { greaterThanOrEqual: "#octolapse_printer_snapshot_min_z" },
+ octolapse_printer_minimum_layer_height: { lessThanOrEqual: "#octolapse_printer_priming_height" },
+ octolapse_printer_priming_height: { greaterThanOrEqual: "#octolapse_printer_minimum_layer_height" },
+ octolapse_printer_auto_position_detection_commands: { csvString: true },
+ octolapse_printer_snapshot_command: {octolapsePrinterSnapshotCommand: true},
+ octolapse_other_slicer_retract_length: {required: true},
+ octolapse_other_slicer_z_hop: {required: true},
+ octolapse_other_slicer_vase_mode: {ifCheckedEnsureNonNull: ["#octolapse_other_slicer_layer_height"] },
+ octolapse_other_slicer_layer_height: {ifOtherCheckedEnsureNonNull: '#octolapse_other_slicer_vase_mode'},
+ octolapse_cura_smooth_spiralized_contours: {ifCheckedEnsureNonNull: ["#octolapse_cura_layer_height"] },
+ octolapse_cura_layer_height: {ifOtherCheckedEnsureNonNull: '#octolapse_cura_smooth_spiralized_contours'},
+ octolapse_cura_4_2_smooth_spiralized_contours: {ifCheckedEnsureNonNull: ["#octolapse_cura_4_2_layer_height"] },
+ octolapse_cura_4_2_layer_height: {ifOtherCheckedEnsureNonNull: '#octolapse_cura_4_2_smooth_spiralized_contours'},
+ octolapse_simplify_3d_vase_mode: {ifCheckedEnsureNonNull: ["#octolapse_simplify_3d_layer_height"] },
+ octolapse_simplify_3d_layer_height: {ifOtherCheckedEnsureNonNull: '#octolapse_simplify_3d_vase_mode'},
+ octolapse_slic3r_pe_spiral_vase: {ifCheckedEnsureNonNull: ["#octolapse_slic3r_pe_layer_height"] },
+ octolapse_slic3r_pe_layer_height: {ifOtherCheckedEnsureNonNull: '#octolapse_slic3r_pe_spiral_vase'}
},
messages: {
- name: "Please enter a name for your profile",
- min_x : { lessThanOrEqual: "Must be less than or equal to the 'X - Width Max' field." },
- max_x : { greaterThanOrEqual: "Must be greater than or equal to the ''X - Width Min'' field." },
- min_y : { lessThanOrEqual: "Must be less than or equal to the 'Y - Width Max' field." },
- max_y : { greaterThanOrEqual: "Must be greater than or equal to the ''Y - Width Min'' field." },
- min_z : { lessThanOrEqual: "Must be less than or equal to the 'Z - Width Max' field." },
- max_z: { greaterThanOrEqual: "Must be greater than or equal to the ''Z - Width Min'' field." },
- snapshot_min_x : { lessThanOrEqual: "Must be less than or equal to the ''Snapshot Max X'' field." },
- snapshot_max_x : { greaterThanOrEqual: "Must be greater than or equal to the ''Snapshot Min X'' field." },
- snapshot_min_y : { lessThanOrEqual: "Must be less than or equal to the 'Snapshot Max Y' field." },
- snapshot_max_y : { greaterThanOrEqual: "Must be greater than or equal to the ''Snapshot Min Y'' field." },
- snapshot_min_z : { lessThanOrEqual: "Must be less than or equal to the 'Snapshot Max Z' field." },
- snapshot_max_z: { greaterThanOrEqual: "Must be greater than or equal to the ''Snapshot Min Z'' field." },
- minimum_layer_height: { lessThanOrEqual: "Must be less than or equal to the ''Priming Height'' field." },
- priming_height: { greaterThanOrEqual: "Must be greater than or equal to the ''Minimum Layer Height'' field." },
- auto_position_detection_commands: { csvString:"Please enter a series of gcode commands (without parameters) separated by commas, or leave this field blank." },
- slicer_cura_smooth_spiralized_contours: {ifCheckedEnsureNonNull: "If vase mode is selected, you must enter a layer height."},
- slicer_other_vase_mode: {ifCheckedEnsureNonNull: "If vase mode is selected, you must enter a layer height."},
- slicer_simplify_3d_vase_mode: {ifCheckedEnsureNonNull: "If vase mode is selected, you must enter a layer height."},
- slicer_slic3r_pe_vase_mode: {ifCheckedEnsureNonNull: "If vase mode is selected, you must enter a layer height."},
- slicer_cura_layer_height: {ifOtherCheckedEnsureNonNull: 'Vase mode is selected, you must enter a layer height.'},
- slicer_other_slicer_layer_height: {ifOtherCheckedEnsureNonNull: 'Vase mode is selected, you must enter a layer height.'},
- slicer_simplify_3d_layer_height: {ifOtherCheckedEnsureNonNull: 'Vase mode is selected, you must enter a layer height.'},
- slicer_slic3r_pe_layer_height: {ifOtherCheckedEnsureNonNull: 'Vase mode is selected, you must enter a layer height.'}
+ octolapse_printer_name: "Please enter a name for your profile",
+ octolapse_printer_min_x : { lessThanOrEqual: "Must be less than or equal to the 'X - Width Max' field." },
+ octolapse_printer_max_x : { greaterThanOrEqual: "Must be greater than or equal to the ''X - Width Min'' field." },
+ octolapse_printer_min_y : { lessThanOrEqual: "Must be less than or equal to the 'Y - Width Max' field." },
+ octolapse_printer_max_y : { greaterThanOrEqual: "Must be greater than or equal to the ''Y - Width Min'' field." },
+ octolapse_printer_min_z : { lessThanOrEqual: "Must be less than or equal to the 'Z - Width Max' field." },
+ octolapse_printer_max_z: { greaterThanOrEqual: "Must be greater than or equal to the ''Z - Width Min'' field." },
+ octolapse_printer_snapshot_min_x : { lessThanOrEqual: "Must be less than or equal to the ''Snapshot Max X'' field." },
+ octolapse_printer_snapshot_max_x : { greaterThanOrEqual: "Must be greater than or equal to the ''Snapshot Min X'' field." },
+ octolapse_printer_snapshot_min_y : { lessThanOrEqual: "Must be less than or equal to the 'Snapshot Max Y' field." },
+ octolapse_printer_snapshot_max_y : { greaterThanOrEqual: "Must be greater than or equal to the ''Snapshot Min Y'' field." },
+ octolapse_printer_snapshot_min_z : { lessThanOrEqual: "Must be less than or equal to the 'Snapshot Max Z' field." },
+ octolapse_printer_snapshot_max_z: { greaterThanOrEqual: "Must be greater than or equal to the ''Snapshot Min Z'' field." },
+ octolapse_printer_minimum_layer_height: { lessThanOrEqual: "Must be less than or equal to the ''Priming Height'' field." },
+ octolapse_printer_priming_height: { greaterThanOrEqual: "Must be greater than or equal to the ''Minimum Layer Height'' field." },
+ octolapse_printer_auto_position_detection_commands: { csvString:"Please enter a series of gcode commands (without parameters) separated by commas, or leave this field blank." },
+ octolapse_cura_smooth_spiralized_contours: {ifCheckedEnsureNonNull: "If vase mode is selected, you must enter a layer height."},
+ octolapse_cura_layer_height: {ifOtherCheckedEnsureNonNull: 'Vase mode is selected, you must enter a layer height.'},
+ octolapse_cura_4_2_smooth_spiralized_contours: {ifCheckedEnsureNonNull: "If vase mode is selected, you must enter a layer height."},
+ octolapse_cura_4_2_layer_height: {ifOtherCheckedEnsureNonNull: 'Vase mode is selected, you must enter a layer height.'},
+ octolapse_other_slicer_vase_mode: {ifCheckedEnsureNonNull: "If vase mode is selected, you must enter a layer height."},
+ octolapse_other_slicer_layer_height: {ifOtherCheckedEnsureNonNull: 'Vase mode is selected, you must enter a layer height.'},
+ octolapse_simplify_3d_vase_mode: {ifCheckedEnsureNonNull: "If vase mode is selected, you must enter a layer height."},
+ octolapse_simplify_3d_layer_height: {ifOtherCheckedEnsureNonNull: 'Vase mode is selected, you must enter a layer height.'},
+ octolapse_slic3r_pe_vase_mode: {ifCheckedEnsureNonNull: "If vase mode is selected, you must enter a layer height."},
+ octolapse_slic3r_pe_layer_height: {ifOtherCheckedEnsureNonNull: 'Vase mode is selected, you must enter a layer height.'}
}
};
- Octolapse.OctolapseGcodeSettings = function(values){
+ Octolapse.ExtruderOffset = function(values)
+ {
var self = this;
- self.retraction_length = ko.observable(values.retraction_length);
- self.retraction_speed = ko.observable(values.retraction_speed);
- self.deretraction_speed = ko.observable(values.deretraction_speed);
- self.x_y_travel_speed = ko.observable(values.x_y_travel_speed);
- self.z_lift_height = ko.observable(values.z_lift_height);
- self.z_lift_speed = ko.observable(values.z_lift_speed);
+ self.x = ko.observable(0);
+ self.y = ko.observable(0);
+ if (values)
+ {
+ self.x(values.x);
+ self.y(values.y);
+ }
};
- Octolapse.Slicers = function(values) {
+ Octolapse.Slicers = function(values, num_extruders_observable) {
//console.log("Creating Slicers");
var self = this;
- self.cura = new Octolapse.CuraViewmodel(values.cura);
- self.other = new Octolapse.OtherSlicerViewModel(values.other);
- self.simplify_3d = new Octolapse.Simplify3dViewModel(values.simplify_3d);
- self.slic3r_pe = new Octolapse.Slic3rPeViewModel(values.slic3r_pe);
+ self.cura = new Octolapse.CuraViewmodel(values.cura, num_extruders_observable);
+ self.other = new Octolapse.OtherSlicerViewModel(values.other, num_extruders_observable);
+ self.simplify_3d = new Octolapse.Simplify3dViewModel(values.simplify_3d, num_extruders_observable);
+ self.slic3r_pe = new Octolapse.Slic3rPeViewModel(values.slic3r_pe, num_extruders_observable);
+
};
Octolapse.PrinterProfileViewModel = function (values) {
@@ -104,18 +112,21 @@ $(function() {
self.guid = ko.observable(values.guid);
self.name = ko.observable(values.name);
self.description = ko.observable(values.description);
- /*
- self.automatic_configuration = new Octolapse.AutomaticPrinterConfigurationViewModel(
- values.automatic_configuration, self
- );
- */
-
- self.gcode_generation_settings = new Octolapse.OctolapseGcodeSettings(values.gcode_generation_settings);
- self.slicers = new Octolapse.Slicers(values.slicers);
+ self.num_extruders = ko.observable(values.num_extruders);
+ self.shared_extruder = ko.observable(values.shared_extruder);
+ self.extruder_offsets = ko.observableArray([]);
+ for(var index = 0; index < values.extruder_offsets.length; index++)
+ {
+ var offset = new Octolapse.ExtruderOffset(values.extruder_offsets[index]);
+ self.extruder_offsets.push(offset);
+ }
+ self.default_extruder = ko.observable(values.default_extruder);
+ self.zero_based_extruder = ko.observable(values.zero_based_extruder);
+ self.slicers = new Octolapse.Slicers(values.slicers, self.num_extruders);
// has_been_saved_by_user profile setting, computed and always returns true
// This will switch has_been_saved_by_user from false to true
// after any user save
- self.has_been_saved_by_user = ko.observable(values.has_been_saved_by_user);
+ self.has_been_saved_by_user = ko.observable(true);
self.slicer_type = ko.observable(values.slicer_type);
self.snapshot_command = ko.observable(values.snapshot_command);
self.auto_detect_position = ko.observable(values.auto_detect_position);
@@ -124,7 +135,6 @@ $(function() {
self.home_x = ko.observable(values.home_x);
self.home_y = ko.observable(values.home_y);
self.home_z = ko.observable(values.home_z);
- self.abort_out_of_bounds = ko.observable(values.abort_out_of_bounds);
self.override_octoprint_profile_settings = ko.observable(values.override_octoprint_profile_settings);
self.bed_type = ko.observable(values.bed_type);
self.diameter_xy = ko.observable(values.diameter_xy);
@@ -161,6 +171,34 @@ $(function() {
self.gocde_axis_compatibility_mode_enabled = ko.observable(values.gocde_axis_compatibility_mode_enabled);
self.home_axis_gcode = ko.observable(values.home_axis_gcode);
+ self.dialog = null;
+
+ self.num_extruders.subscribe(function() {
+ var num_extruders = self.num_extruders();
+ if (num_extruders < 1) {
+ num_extruders = 1;
+ }
+ else if (num_extruders > 16){
+ num_extruders = 16;
+ }
+
+ var has_changed = false;
+ while(self.extruder_offsets().length < num_extruders)
+ {
+ has_changed = true;
+ self.extruder_offsets.push(new Octolapse.ExtruderOffset());
+ }
+ while(self.extruder_offsets().length > num_extruders)
+ {
+ has_changed = true;
+ self.extruder_offsets.pop();
+ }
+ if (has_changed) {
+ self.dialog.bind_validation();
+ self.dialog.bind_help_links();
+ }
+ });
+
self.origin_type_options = ko.pureComputed(function(){
var options = [];
if (self.bed_type() == 'circular')
@@ -185,6 +223,10 @@ $(function() {
self.name(server_profile.name);
self.description(server_profile.description);
self.has_been_saved_by_user(true);
+ self.num_extruders(server_profile.num_extruders);
+ self.shared_extruder(server_profile.shared_extruder);
+ self.extruder_offsets(server_profile.extruder_offsets);
+ self.zero_based_extruder(server_profile.zero_based_extruder);
self.snapshot_command(server_profile.snapshot_command);
self.auto_detect_position(server_profile.auto_detect_position);
self.auto_position_detection_commands(server_profile.auto_position_detection_commands);
@@ -192,7 +234,6 @@ $(function() {
self.home_x(server_profile.home_x);
self.home_y(server_profile.home_y);
self.home_z(server_profile.home_z);
- self.abort_out_of_bounds(server_profile.abort_out_of_bounds);
self.override_octoprint_profile_settings(server_profile.override_octoprint_profile_settings);
self.bed_type(server_profile.bed_type);
self.diameter_xy(server_profile.diameter_xy);
@@ -228,6 +269,10 @@ $(function() {
self.home_axis_gcode(server_profile.home_axis_gcode);
};
+ self.on_opened = function(dialog)
+ {
+ self.dialog = dialog;
+ };
self.on_closed = function()
{
self.automatic_configuration.on_closed();
@@ -235,9 +280,10 @@ $(function() {
self.toJS = function()
{
- // need to remove the parent link from the automatic configuration to prevent a cyclic copy
+ var dialog = self.dialog;
+ self.dialog = null;
var copy = ko.toJS(self);
- delete copy.helpers;
+ self.dialog = dialog;
return copy;
};
diff --git a/octoprint_octolapse/static/js/octolapse.profiles.printer.slicer.cura.js b/octoprint_octolapse/static/js/octolapse.profiles.printer.slicer.cura.js
index 43bc99b3..a7003a87 100644
--- a/octoprint_octolapse/static/js/octolapse.profiles.printer.slicer.cura.js
+++ b/octoprint_octolapse/static/js/octolapse.profiles.printer.slicer.cura.js
@@ -1,19 +1,69 @@
-Octolapse.CuraViewmodel = function (values) {
- var self = this;
+/*
+##################################################################################
+# Octolapse - A plugin for OctoPrint used for making stabilized timelapse videos.
+# Copyright (C) 2023 Brad Hochgesang
+##################################################################################
+# This program is free software: you can redistribute it and/or modify
+# it under the terms of the GNU Affero General Public License as published
+# by the Free Software Foundation, either version 3 of the License, or
+# (at your option) any later version.
+#
+# This program is distributed in the hope that it will be useful,
+# but WITHOUT ANY WARRANTY; without even the implied warranty of
+# MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
+# GNU Affero General Public License for more details.
+#
+# You should have received a copy of the GNU Affero General Public License
+# along with this program. If not, see the following:
+# https://github.com/FormerLurker/Octolapse/blob/master/LICENSE
+#
+# You can contact the author either through the git-hub repository, or at the
+# following email address: FormerLurker@pm.me
+##################################################################################
+*/
+Octolapse.CuraExtruderViewModel = function (values, extruder_index) {
+ var self=this;
+ self.index = extruder_index;
+ self.speed_z_hop = ko.observable(null);
+ self.max_feedrate_z_override = ko.observable(null);
+ self.retraction_amount = ko.observable(null);
+ self.retraction_hop = ko.observable(null);
+ self.retraction_hop_enabled = ko.observable(false);
+ self.retraction_enable = ko.observable(false);
+ self.retraction_speed = ko.observable(null);
+ self.retraction_retract_speed = ko.observable(null);
+ self.retraction_prime_speed = ko.observable(null);
+ self.speed_travel = ko.observable(null);
+
+ if (values && values.extruders.length > self.index) {
+ var extruder = values.extruders[self.index];
+ if (!extruder)
+ return;
+ self.speed_z_hop(extruder.speed_z_hop);
+ self.max_feedrate_z_override(extruder.max_feedrate_z_override);
+ self.retraction_amount(extruder.retraction_amount);
+ self.retraction_hop(extruder.retraction_hop);
+ self.retraction_hop_enabled(extruder.retraction_hop_enabled || false);
+ self.retraction_enable(extruder.retraction_enable || false);
+ self.retraction_speed(extruder.retraction_speed);
+ self.retraction_retract_speed(extruder.retraction_retract_speed);
+ self.retraction_prime_speed(extruder.retraction_prime_speed);
+ self.speed_travel(extruder.speed_travel);
+ }
+};
- // Create Observables
- self.retraction_amount = ko.observable(values.retraction_amount);
- self.retraction_retract_speed = ko.observable(values.retraction_retract_speed);
- self.retraction_prime_speed = ko.observable(values.retraction_prime_speed);
- self.speed_travel = ko.observable(values.speed_travel);
- self.max_feedrate_z_override = ko.observable(values.max_feedrate_z_override);
- self.speed_z_hop = ko.observable(values.speed_z_hop);
- self.retraction_hop = ko.observable(values.retraction_hop);
- self.retraction_hop_enabled = ko.observable(values.retraction_hop_enabled);
- self.retraction_enable = ko.observable(values.retraction_enable);
+Octolapse.CuraViewmodel = function (values, num_extruders_observable) {
+ var self = this;
+ // Observables
+ self.num_extruders_observable = num_extruders_observable;
+ var extruders = [];
+ for (var index = 0; index < self.num_extruders_observable(); index++)
+ {
+ extruders.push(new Octolapse.CuraExtruderViewModel(values, index));
+ }
+ self.extruders = ko.observableArray(extruders);
self.layer_height = ko.observable(values.layer_height);
- self.smooth_spiralized_contours = ko.observable(values.smooth_spiralized_contours);
- self.magic_mesh_surface_mode = ko.observable(values.magic_mesh_surface_mode);
+ self.smooth_spiralized_contours = ko.observable(values.smooth_spiralized_contours || false);
// Create constants
self.speed_tolerance = 0.1 / 60.0 / 2.0;
self.round_to_increment_mm_min = 0.00000166667;
@@ -21,13 +71,26 @@ Octolapse.CuraViewmodel = function (values) {
self.round_to_increment_length = 0.0001;
self.round_to_increment_num_layers = 1;
- self.get_all_speed_settings = function()
- {
- return [
- self.retraction_retract_speed,
- self.retraction_prime_speed,
- self.speed_travel,
- self.max_feedrate_z_override,
- ]
- }
+ self.num_extruders_observable.subscribe(function() {
+ var num_extruders = self.num_extruders_observable();
+ if (num_extruders < 1) {
+ num_extruders = 1;
+ }
+ else if (num_extruders > 16){
+ num_extruders = 16;
+ }
+
+ var extruders = self.extruders();
+ while(extruders.length < num_extruders)
+ {
+ var new_extruder = new Octolapse.CuraExtruderViewModel(null, extruders.length-1);
+ extruders.push(new_extruder);
+ }
+ while(extruders.length > num_extruders)
+ {
+ extruders.pop();
+ }
+ self.extruders(extruders);
+
+ });
};
diff --git a/octoprint_octolapse/static/js/octolapse.profiles.printer.slicer.other.js b/octoprint_octolapse/static/js/octolapse.profiles.printer.slicer.other.js
index 51e5aa30..7123e0d8 100644
--- a/octoprint_octolapse/static/js/octolapse.profiles.printer.slicer.other.js
+++ b/octoprint_octolapse/static/js/octolapse.profiles.printer.slicer.other.js
@@ -1,46 +1,99 @@
-Octolapse.OtherSlicerViewModel = function (values) {
- var self = this;
- // Create Observables
- self.retract_length = ko.observable(values.retract_length);
- self.z_hop = ko.observable(values.z_hop);
- self.travel_speed = ko.observable(values.travel_speed);
- self.retract_speed = ko.observable(values.retract_speed);
- self.deretract_speed = ko.observable(values.deretract_speed);
- self.z_travel_speed = ko.observable(values.z_travel_speed);
- self.speed_tolerance = ko.observable(values.speed_tolerance);
- self.vase_mode = ko.observable(values.vase_mode);
- self.layer_height = ko.observable(values.layer_height);
- self.axis_speed_display_units = ko.observable(values.axis_speed_display_units);
+/*
+##################################################################################
+# Octolapse - A plugin for OctoPrint used for making stabilized timelapse videos.
+# Copyright (C) 2023 Brad Hochgesang
+##################################################################################
+# This program is free software: you can redistribute it and/or modify
+# it under the terms of the GNU Affero General Public License as published
+# by the Free Software Foundation, either version 3 of the License, or
+# (at your option) any later version.
+#
+# This program is distributed in the hope that it will be useful,
+# but WITHOUT ANY WARRANTY; without even the implied warranty of
+# MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
+# GNU Affero General Public License for more details.
+#
+# You should have received a copy of the GNU Affero General Public License
+# along with this program. If not, see the following:
+# https://github.com/FormerLurker/Octolapse/blob/master/LICENSE
+#
+# You can contact the author either through the git-hub repository, or at the
+# following email address: FormerLurker@pm.me
+##################################################################################
+*/
+Octolapse.OtherSlicerExtruderViewModel = function (values, extruder_index) {
+ var self=this;
+ self.index = extruder_index;
+ self.retract_length = ko.observable(null);
+ self.z_hop = ko.observable(null);
+ self.retract_speed = ko.observable(null);
+ self.deretract_speed = ko.observable(null);
+ self.travel_speed = ko.observable(null);
+ self.z_travel_speed = ko.observable(null);
+ self.retract_before_move = ko.observable(false);
+
+ if (values && values.extruders.length > self.index) {
+ var extruder = values.extruders[self.index];
+ if (!extruder)
+ return;
+ self.retract_length(extruder.retract_length);
+ self.z_hop(extruder.z_hop);
+ self.retract_speed(extruder.retract_speed);
+ self.deretract_speed(extruder.deretract_speed);
+ self.travel_speed(extruder.travel_speed);
+ self.z_travel_speed(extruder.z_travel_speed);
+ self.retract_before_move(extruder.retract_before_move || false);
+ }
- self.retract_before_move = ko.pureComputed(function () {
- if (self.retract_length() != null && self.retract_length() > 0)
- return true;
- return false;
- }, self);
self.lift_when_retracted = ko.pureComputed(function () {
if (self.retract_before_move() && self.z_hop() != null && self.z_hop() > 0)
return true;
return false;
}, self);
+};
- self.get_all_speed_settings = function()
+Octolapse.OtherSlicerViewModel = function (values, num_extruders_observable) {
+ var self = this;
+ // Observables
+ self.num_extruders_observable = num_extruders_observable;
+ var extruders = [];
+ for (var index = 0; index < self.num_extruders_observable(); index++)
{
- return [
- self.travel_speed,
- self.retract_speed,
- self.deretract_speed,
- self.z_travel_speed,
- self.speed_tolerance,
- self.axis_speed_display_units
- ]
- };
+ extruders.push(new Octolapse.OtherSlicerExtruderViewModel(values, index));
+ }
+ self.extruders = ko.observableArray(extruders);
+ self.speed_tolerance = ko.observable(values.speed_tolerance);
+ self.vase_mode = ko.observable(values.vase_mode || false);
+ self.layer_height = ko.observable(values.layer_height);
+ self.axis_speed_display_units = ko.observable(values.axis_speed_display_units);
// Declare constants
self.round_to_increment_mm_min = 0.001;
self.round_to_increment_mm_sec = 0.000001;
+ self.num_extruders_observable.subscribe(function() {
+ var num_extruders = self.num_extruders_observable();
+ if (num_extruders < 1) {
+ num_extruders = 1;
+ }
+ else if (num_extruders > 16){
+ num_extruders = 16;
+ }
+ var extruders = self.extruders();
+ while(extruders.length < num_extruders)
+ {
+ var new_extruder = new Octolapse.OtherSlicerExtruderViewModel(null, extruders.length-1);
+ extruders.push(new_extruder);
+ }
+ while(extruders.length > num_extruders)
+ {
+ extruders.pop();
+ }
+ self.extruders(extruders);
+ });
+
// get the time component of the axis speed units (min/mm)
- self.getAxisSpeedTimeUnit = ko.pureComputed(function () {
+ self.getAxisSpeedTimeUnit = ko.computed(function () {
if (self.axis_speed_display_units() === "mm-min")
return 'min';
if (self.axis_speed_display_units() === "mm-sec")
@@ -48,19 +101,16 @@ Octolapse.OtherSlicerViewModel = function (values) {
return '?';
}, self);
-
-
self.axisSpeedDisplayUnitsChanged = function (obj, event) {
if (Octolapse.Globals.is_admin()) {
if (event.originalEvent) {
// Get the current guid
- var newUnit = $("#octolapse_axis_speed_display_unit_options").val();
+ var newUnit = $("#octolapse_other_slicer_axis_speed_display_unit_options").val();
var previousUnit = self.axis_speed_display_units();
if (newUnit === previousUnit) {
//console.log("Axis speed display units, no change detected!")
return false;
-
}
//console.log("Changing axis speed from " + previousUnit + " to " + newUnit)
// in case we want to have more units in the future, check all cases
@@ -69,11 +119,15 @@ Octolapse.OtherSlicerViewModel = function (values) {
var axis_speed_round_to_increment = 0.000001;
var axis_speed_round_to_unit = 'mm-sec';
self.speed_tolerance(Octolapse.convertAxisSpeedUnit(self.speed_tolerance(), newUnit, previousUnit, axis_speed_round_to_increment, axis_speed_round_to_unit));
- self.retract_speed(Octolapse.convertAxisSpeedUnit(self.retract_speed(), newUnit, previousUnit, self.round_to_increment_mm_min, previousUnit));
- self.deretract_speed(Octolapse.convertAxisSpeedUnit(self.deretract_speed(), newUnit, previousUnit, self.round_to_increment_mm_min, previousUnit));
- self.travel_speed(Octolapse.convertAxisSpeedUnit(self.travel_speed(), newUnit, previousUnit, self.round_to_increment_mm_min, previousUnit));
- self.z_travel_speed(Octolapse.convertAxisSpeedUnit(self.z_travel_speed(), newUnit, previousUnit, self.round_to_increment_mm_min, previousUnit));
- // Optional values
+ for (var i=0; i < self.extruders().length; i++) {
+ var extruder = self.extruders()[i];
+ extruder.retract_speed(Octolapse.convertAxisSpeedUnit(extruder.retract_speed(), newUnit, previousUnit, self.round_to_increment_mm_min, previousUnit));
+ extruder.deretract_speed(Octolapse.convertAxisSpeedUnit(extruder.deretract_speed(), newUnit, previousUnit, self.round_to_increment_mm_min, previousUnit));
+ extruder.travel_speed(Octolapse.convertAxisSpeedUnit(extruder.travel_speed(), newUnit, previousUnit, self.round_to_increment_mm_min, previousUnit));
+ extruder.z_travel_speed(Octolapse.convertAxisSpeedUnit(extruder.z_travel_speed(), newUnit, previousUnit, self.round_to_increment_mm_min, previousUnit));
+ // Optional values
+ }
+ self.axis_speed_display_units(newUnit);
return true;
}
}
diff --git a/octoprint_octolapse/static/js/octolapse.profiles.printer.slicer.simplify_3d.js b/octoprint_octolapse/static/js/octolapse.profiles.printer.slicer.simplify_3d.js
index c5809c78..637dbb55 100644
--- a/octoprint_octolapse/static/js/octolapse.profiles.printer.slicer.simplify_3d.js
+++ b/octoprint_octolapse/static/js/octolapse.profiles.printer.slicer.simplify_3d.js
@@ -1,29 +1,85 @@
-Octolapse.Simplify3dViewModel = function (values) {
- var self = this;
+/*
+##################################################################################
+# Octolapse - A plugin for OctoPrint used for making stabilized timelapse videos.
+# Copyright (C) 2023 Brad Hochgesang
+##################################################################################
+# This program is free software: you can redistribute it and/or modify
+# it under the terms of the GNU Affero General Public License as published
+# by the Free Software Foundation, either version 3 of the License, or
+# (at your option) any later version.
+#
+# This program is distributed in the hope that it will be useful,
+# but WITHOUT ANY WARRANTY; without even the implied warranty of
+# MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
+# GNU Affero General Public License for more details.
+#
+# You should have received a copy of the GNU Affero General Public License
+# along with this program. If not, see the following:
+# https://github.com/FormerLurker/Octolapse/blob/master/LICENSE
+#
+# You can contact the author either through the git-hub repository, or at the
+# following email address: FormerLurker@pm.me
+##################################################################################
+*/
+Octolapse.Simplify3dExtruderViewModel = function (values, extruder_index) {
+ var self=this;
+ self.index = extruder_index;
+ self.retraction_distance = ko.observable(null);
+ self.retraction_vertical_lift = ko.observable(null);
+ self.retraction_speed = ko.observable(null);
+ self.extruder_use_retract = ko.observable(false);
+
+ if (values && values.extruders.length > self.index) {
+ var extruder = values.extruders[self.index];
+ if (!extruder)
+ return;
+ self.retraction_distance(extruder.retraction_distance);
+ self.retraction_vertical_lift(extruder.retraction_vertical_lift);
+ self.retraction_speed(extruder.retraction_speed);
+ self.extruder_use_retract(extruder.extruder_use_retract || false);
+ }
+};
+Octolapse.Simplify3dViewModel = function (values, num_extruders_observable) {
+ var self = this;
// Observables
- self.retraction_distance = ko.observable(values.retraction_distance);
- self.retraction_vertical_lift = ko.observable(values.retraction_vertical_lift);
- self.retraction_speed = ko.observable(values.retraction_speed);
+ self.num_extruders_observable = num_extruders_observable;
+ var extruders = [];
+ for (var index = 0; index < self.num_extruders_observable(); index++)
+ {
+ extruders.push(new Octolapse.Simplify3dExtruderViewModel(values, index));
+ }
+ self.extruders = ko.observableArray(extruders);
self.x_y_axis_movement_speed = ko.observable(values.x_y_axis_movement_speed);
self.z_axis_movement_speed = ko.observable(values.z_axis_movement_speed);
- self.extruder_use_retract = ko.observable(values.extruder_use_retract);
- self.spiral_vase_mode = ko.observable(values.spiral_vase_mode);
+ self.spiral_vase_mode = ko.observable(values.spiral_vase_mode || false);
self.layer_height = ko.observable(values.layer_height);
- self.get_all_speed_settings = function()
- {
- return [
- self.retraction_speed,
- self.x_y_axis_movement_speed,
- self.z_axis_movement_speed,
- ]
- };
// Constants
- self.speed_tolerance = values.speed_tolerance
- self.axis_speed_display_settings = 'mm-min'
+ self.speed_tolerance = values.speed_tolerance;
+ self.axis_speed_display_settings = 'mm-min';
self.round_to_increment_percent = 1;
self.round_to_increment_speed_mm_min = 0.1;
self.round_to_increment_length = 0.01;
self.percent_value_default = 100.0;
+ self.num_extruders_observable.subscribe(function() {
+ var num_extruders = self.num_extruders_observable();
+ if (num_extruders < 1) {
+ num_extruders = 1;
+ }
+ else if (num_extruders > 16){
+ num_extruders = 16;
+ }
+ var extruders = self.extruders();
+ while(extruders.length < num_extruders)
+ {
+ var new_extruder = new Octolapse.Simplify3dExtruderViewModel(null, extruders.length-1);
+ extruders.push(new_extruder);
+ }
+ while(extruders.length > num_extruders)
+ {
+ extruders.pop();
+ }
+ self.extruders(extruders);
+ });
};
diff --git a/octoprint_octolapse/static/js/octolapse.profiles.printer.slicer.slic3r_pe.js b/octoprint_octolapse/static/js/octolapse.profiles.printer.slicer.slic3r_pe.js
index 64cdfab8..7177434c 100644
--- a/octoprint_octolapse/static/js/octolapse.profiles.printer.slicer.slic3r_pe.js
+++ b/octoprint_octolapse/static/js/octolapse.profiles.printer.slicer.slic3r_pe.js
@@ -1,20 +1,60 @@
-Octolapse.Slic3rPeViewModel = function (values) {
- var self = this;
+/*
+##################################################################################
+# Octolapse - A plugin for OctoPrint used for making stabilized timelapse videos.
+# Copyright (C) 2023 Brad Hochgesang
+##################################################################################
+# This program is free software: you can redistribute it and/or modify
+# it under the terms of the GNU Affero General Public License as published
+# by the Free Software Foundation, either version 3 of the License, or
+# (at your option) any later version.
+#
+# This program is distributed in the hope that it will be useful,
+# but WITHOUT ANY WARRANTY; without even the implied warranty of
+# MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
+# GNU Affero General Public License for more details.
+#
+# You should have received a copy of the GNU Affero General Public License
+# along with this program. If not, see the following:
+# https://github.com/FormerLurker/Octolapse/blob/master/LICENSE
+#
+# You can contact the author either through the git-hub repository, or at the
+# following email address: FormerLurker@pm.me
+##################################################################################
+*/
+Octolapse.Slic3rPeExtruderViewModel = function (values, extruder_index) {
+ var self=this;
+ self.index = extruder_index;
+ self.retract_length = ko.observable(null);
+ self.retract_lift = ko.observable(null);
+ self.retract_speed = ko.observable(null);
+ self.deretract_speed = ko.observable(null);
+
+ if (values && values.extruders.length > self.index) {
+ var extruder = values.extruders[self.index];
+ if (!extruder)
+ return;
+ self.retract_length(extruder.retract_length);
+ self.retract_lift(extruder.retract_lift);
+ self.retract_speed(extruder.retract_speed);
+ self.deretract_speed(extruder.deretract_speed);
+ }
+};
+
+Octolapse.Slic3rPeViewModel = function (values, num_extruders_observable) {
+ var self = this;
// Observables
- self.retract_length = ko.observable(values.retract_length);
- self.retract_lift = ko.observable(values.retract_lift);
- self.retract_speed = ko.observable(values.retract_speed);
- self.deretract_speed = ko.observable(values.deretract_speed);
+
+ self.num_extruders_observable = num_extruders_observable;
+ var extruders = [];
+ for (var index = 0; index < self.num_extruders_observable(); index++)
+ {
+ extruders.push(new Octolapse.Slic3rPeExtruderViewModel(values, index));
+ }
+ self.extruders = ko.observableArray(extruders);
self.travel_speed = ko.observable(values.travel_speed);
self.layer_height = ko.observable(values.layer_height);
- self.spiral_vase = ko.observable(values.spiral_vase);
- self.retract_before_travel = ko.pureComputed(function () {
- if (self.retract_length() != null && self.retract_length() > 0)
- return true;
- return false;
- }, self);
-
+ self.spiral_vase = ko.observable(values.spiral_vase || false);
// Constants
self.speed_tolerance = 0.01 / 60.0 / 2.0;
self.axis_speed_display_units = 'mm-sec';
@@ -25,4 +65,25 @@ Octolapse.Slic3rPeViewModel = function (values) {
self.round_to_increment_retraction_length = 0.000001;
self.round_to_increment_lift_z = 0.0001;
+ self.num_extruders_observable.subscribe(function() {
+ var num_extruders = self.num_extruders_observable();
+ if (num_extruders < 1) {
+ num_extruders = 1;
+ }
+ else if (num_extruders > 16){
+ num_extruders = 16;
+ }
+ var extruders = self.extruders();
+ while(extruders.length < num_extruders)
+ {
+ var new_extruder = new Octolapse.Slic3rPeExtruderViewModel(null, extruders.length-1);
+ extruders.push(new_extruder);
+ }
+ while(extruders.length > num_extruders)
+ {
+ extruders.pop();
+ }
+ self.extruders(extruders);
+
+ });
};
diff --git a/octoprint_octolapse/static/js/octolapse.profiles.rendering.js b/octoprint_octolapse/static/js/octolapse.profiles.rendering.js
index 37e798df..3706b73e 100644
--- a/octoprint_octolapse/static/js/octolapse.profiles.rendering.js
+++ b/octoprint_octolapse/static/js/octolapse.profiles.rendering.js
@@ -1,7 +1,7 @@
/*
##################################################################################
# Octolapse - A plugin for OctoPrint used for making stabilized timelapse videos.
-# Copyright (C) 2017 Brad Hochgesang
+# Copyright (C) 2023 Brad Hochgesang
##################################################################################
# This program is free software: you can redistribute it and/or modify
# it under the terms of the GNU Affero General Public License as published
@@ -60,8 +60,8 @@ $(function() {
self.max_fps = ko.observable(values.max_fps);
self.min_fps = ko.observable(values.min_fps);
self.output_format = ko.observable(values.output_format);
- self.sync_with_timelapse = ko.observable(values.sync_with_timelapse);
self.bitrate = ko.observable(values.bitrate);
+ self.constant_rate_factor = ko.observable(values.constant_rate_factor);
self.post_roll_seconds = ko.observable(values.post_roll_seconds);
self.pre_roll_seconds = ko.observable(values.pre_roll_seconds);
self.output_template = ko.observable(values.output_template);
@@ -71,12 +71,8 @@ $(function() {
self.overlay_text_template = ko.observable(values.overlay_text_template);
self.overlay_font_path = ko.observable(values.overlay_font_path);
self.overlay_font_size = ko.observable(values.overlay_font_size);
- self.cleanup_after_render_complete = ko.observable(values.cleanup_after_render_complete);
- self.cleanup_after_render_fail = ko.observable(values.cleanup_after_render_fail);
+ self.archive_snapshots = ko.observable(values.archive_snapshots);
self.thread_count = ko.observable(values.thread_count);
- self.snapshots_to_skip_beginning = ko.observable(values.snapshots_to_skip_beginning);
- self.snapshot_to_skip_end = ko.observable(values.snapshot_to_skip_end);
-
self.data.font_list = ko.observableArray(); // A list of Fonts that are available for selection on the server.
// Text position as a JSON string.
self.overlay_text_pos = ko.pureComputed({
@@ -96,7 +92,7 @@ $(function() {
return;
}
try {
- positions = JSON.parse(value)
+ var positions = JSON.parse(value);
self.overlay_text_pos_x(positions[0]);
self.overlay_text_pos_y(positions[1]);
}
@@ -132,7 +128,7 @@ $(function() {
rgba = JSON.parse(text_color);
}
// Build the correct string.
- return 'rgba(' + rgba.join(', ') + ')'
+ return 'rgba(' + rgba.join(', ') + ')';
};
self.css_to_text_color = function(css){
@@ -171,19 +167,15 @@ $(function() {
});
self.overlay_preview_image_alt_text = ko.computed(function() {
if (self.data.overlay_preview_image_error.length == 0) {
- return 'A preview of the overlay text.'
+ return 'A preview of the overlay text.';
}
return 'Image could not be retrieved from server. The error returned was: ' + self.data.overlay_preview_image_error() + '.';
});
- self.data.can_synchronize_format = ko.pureComputed(function() {
- return ['mp4','h264'].indexOf(self.output_format()) > -1;
- });
-
// This function is called when the Edit Profile dialog shows.
self.onShow = function(parent) {
- $('#rendering_profile_overlay_color').minicolors({format: 'rgb', opacity: true});
- $('#rendering_profile_outline_color').minicolors({format: 'rgb', opacity: true});
+ $('#octolapse_rendering_overlay_color').minicolors({format: 'rgb', opacity: true});
+ $('#octolapse_rendering_outline_color').minicolors({format: 'rgb', opacity: true});
self.updateWatermarkList();
self.updateFontList();
self.initWatermarkUploadButton();
@@ -224,22 +216,22 @@ $(function() {
return OctoPrint.get(OctoPrint.getBlueprintUrl('octolapse') +
'rendering/watermark')
.then(function(response) {
- self.watermark_list.removeAll()
- // The let format is not working in some versions of safari
+ var watermarks = [];
for (var index = 0; index < response['filepaths'].length;index++) {
- self.watermark_list.push(new WatermarkImage(response['filepaths'][index]));
+ watermarks.push(new WatermarkImage(response['filepaths'][index]));
}
+ self.watermark_list(watermarks);
}, function(response) {
- self.watermark_list.removeAll()
+ var watermarks = [new WatermarkImage("Failed to load watermarks from Octolapse data directory.")];
// Hacky solution, but good enough. We shouldn't encounter this error too much anyways.
- self.watermark_list.push(new WatermarkImage("Failed to load watermarks from Octolapse data directory."));
+ self.watermark_list(watermarks);
});
};
self.initWatermarkUploadButton = function() {
// Set up the file upload button.
- var $watermarkUploadElement = $('#octolapse_watermark_path_upload');
- var $progressBarContainer = $('#octolapse-upload-watermark-progress');
+ var $watermarkUploadElement = $('#octolapse_rendering_watermark_path_upload');
+ var $progressBarContainer = $('#octolapse_rendering_upload_watermark_progress');
var $progressBar = $progressBarContainer.find('.progress-bar');
$watermarkUploadElement.fileupload({
@@ -250,6 +242,10 @@ $(function() {
// TODO: Monitor issue with chunking and re-add when it is fixed.
//maxChunkSize: 1000000,
maxFilesize: 10,
+ start: function(e) {
+ $progressBar.text("Starting...");
+ $progressBar.animate({'width': '0'}, {'queue': false}).removeClass('failed');
+ },
progressall: function (e, data) {
// TODO: Get a better progress bar implementation.
var progress = parseInt(data.loaded / data.total * 100, 10);
@@ -271,7 +267,7 @@ $(function() {
//var matchingWatermarks = self.watermark_list().filter(w=>w.getFilename() == data.files[0].name);
if (matchingWatermarks.length == 0) {
//console.log("Error: No matching watermarks found!");
- return
+ return;
}
if (matchingWatermarks > 1){
//console.log("Error: More than one matching watermark found! Selecting best guess.");
@@ -290,11 +286,14 @@ $(function() {
self.updateFontList = function() {
return OctoPrint.get(OctoPrint.getBlueprintUrl('octolapse') + 'rendering/font')
.then(function(response) {
- self.data.font_list.removeAll();
+ var server_fonts = response.fonts;
+ var font_list = [];
+
// The let expression was not working in safari
- for (var index = 0; index< response.length; index++) {
- self.data.font_list.push(new Font(response[index]));
+ for (var index = 0; index< server_fonts.length; index++) {
+ font_list.push(new Font(server_fonts[index]));
}
+ self.data.font_list(font_list);
}, function(response) {
// Failed to load any fonts.
self.data.font_list.removeAll();
@@ -308,6 +307,23 @@ $(function() {
// Request a preview of the overlay from the server.
self.requestOverlayPreview = function() {
+ if (!self.overlay_text_template())
+ {
+ self.data.overlay_preview_image('');
+ self.data.overlay_preview_image_error(
+ "Enter the text you wish to appear in your overlay in the 'Text' box above, and click refresh to preview the rendering overlay."
+ );
+ return;
+ }
+ if (self.overlay_font_path() === "")
+ {
+ self.data.overlay_preview_image('');
+ self.data.overlay_preview_image_error(
+ "Choose a font from the list above, and click refresh to preview the rendering overlay."
+ );
+ return;
+ }
+
var data = {
'overlay_text_template': self.overlay_text_template(),
'overlay_font_path': self.overlay_font_path(),
@@ -345,9 +361,8 @@ $(function() {
var copy = ko.toJS(self);
return copy;
};
-
+
self.updateFromServer = function(values) {
- self.guid(values.guid);
self.name(values.name);
self.description(values.description);
self.enabled(values.enabled);
@@ -357,14 +372,21 @@ $(function() {
self.max_fps(values.max_fps);
self.min_fps(values.min_fps);
self.output_format(values.output_format);
- self.sync_with_timelapse(values.sync_with_timelapse);
self.bitrate(values.bitrate);
+ // Might not be included in server profiles. Make sure it is.
+ if (typeof values.constant_rate_factor !== 'undefined')
+ self.constant_rate_factor(values.constant_rate_factor);
self.post_roll_seconds(values.post_roll_seconds);
self.pre_roll_seconds(values.pre_roll_seconds);
self.output_template(values.output_template);
- self.cleanup_after_render_complete(values.cleanup_after_render_complete);
- self.cleanup_after_render_fail(values.cleanup_after_render_fail);
- self.thread_count(values.thread_count);
+ self.archive_snapshots(values.archive_snapshots);
+ self.thread_count(values.thread_count);
+ // Clear any settings that we don't want to update, unless they aren't important.
+ self.overlay_text_template("");
+ self.selected_watermark("");
+ self.enable_watermark(false);
+ self.overlay_font_path("");
+
};
self.automatic_configuration = new Octolapse.ProfileLibraryViewModel(
@@ -395,36 +417,37 @@ $(function() {
};
Octolapse.RenderingProfileValidationRules = {
rules: {
- bitrate: { required: true, ffmpegBitRate: true },
- output_format : {required: true},
- fps_calculation_type: {required: true},
- min_fps: { lessThanOrEqual: '#rendering_profile_max_fps' },
- max_fps: { greaterThanOrEqual: '#rendering_profile_min_fps' },
- overlay_text_valign: {required: true},
- overlay_text_halign: {required: true},
- overlay_text_alignment: {required: true},
- output_template: {
+ octolapse_rendering_bitrate: { required: true, ffmpegBitRate: true },
+ octolapse_rendering_output_format : {required: true},
+ octolapse_rendering_fps_calculation_type: {required: true},
+ octolapse_rendering_min_fps: { lessThanOrEqual: '#octolapse_rendering_max_fps' },
+ octolapse_rendering_max_fps: { greaterThanOrEqual: '#octolapse_rendering_min_fps' },
+ octolapse_rendering_overlay_text_valign: {required: true},
+ octolapse_rendering_overlay_text_halign: {required: true},
+ octolapse_rendering_overlay_text_alignment: {required: true},
+ octolapse_rendering_output_template: {
remote: {
url: "./plugin/octolapse/validateRenderingTemplate",
type:"post"
}
},
- overlay_text_template: {
+ octolapse_rendering_overlay_text_template: {
remote: {
url: "./plugin/octolapse/validateOverlayTextTemplate",
type:"post"
}
+
},
- octolapse_overlay_font_size: { required: true, integerPositive: true },
- octolapse_overlay_text_pos: { required: true },
+ octolapse_rendering_overlay_font_size: { required: true, integerPositive: true },
+ octolapse_rendering_overlay_text_pos: { required: true },
},
messages: {
- name: "Please enter a name for your profile",
- min_fps: { lessThanOrEqual: 'Must be less than or equal to the maximum fps.' },
- max_fps: { greaterThanOrEqual: 'Must be greater than or equal to the minimum fps.' },
- output_template: { octolapseRenderingTemplate: 'Either there is an invalid token in the rendering template, or the resulting file name is not valid.' },
- overlay_text_template: { octolapseOverlayTextTemplate: 'Either there is an invalid token in the overlay text template, or the resulting file name is not valid.' },
- octolapse_overlay_text_pos: { required: 'Position offsets must be valid integers.' },
+ octolapse_rendering_name: "Please enter a name for your profile",
+ octolapse_rendering_min_fps: { lessThanOrEqual: 'Must be less than or equal to the maximum fps.' },
+ octolapse_rendering_max_fps: { greaterThanOrEqual: 'Must be greater than or equal to the minimum fps.' },
+ octolapse_rendering_output_template: { octolapseRenderingTemplate: 'Either there is an invalid token in the rendering template, or the resulting file name is not valid.' },
+ octolapse_rendering_overlay_text_template: { octolapseOverlayTextTemplate: 'Either there is an invalid token in the overlay text template, or the resulting file name is not valid.' },
+ octolapse_rendering_overlay_text_pos: { required: 'Position offsets must be valid integers.' },
}
};
});
diff --git a/octoprint_octolapse/static/js/octolapse.profiles.stabilization.js b/octoprint_octolapse/static/js/octolapse.profiles.stabilization.js
index 3a542ed5..1feb4fbc 100644
--- a/octoprint_octolapse/static/js/octolapse.profiles.stabilization.js
+++ b/octoprint_octolapse/static/js/octolapse.profiles.stabilization.js
@@ -1,7 +1,7 @@
/*
##################################################################################
# Octolapse - A plugin for OctoPrint used for making stabilized timelapse videos.
-# Copyright (C) 2017 Brad Hochgesang
+# Copyright (C) 2023 Brad Hochgesang
##################################################################################
# This program is free software: you can redistribute it and/or modify
# it under the terms of the GNU Affero General Public License as published
@@ -48,9 +48,9 @@ $(function () {
self.y_relative_path = ko.observable(values.y_relative_path);
self.y_relative_path_loop = ko.observable(values.y_relative_path_loop);
self.y_relative_path_invert_loop = ko.observable(values.y_relative_path_invert_loop);
+ self.wait_for_moves_to_finish = ko.observable(values.wait_for_moves_to_finish);
self.updateFromServer = function(values) {
- self.guid(values.guid);
self.name(values.name);
self.description(values.description);
self.x_type(values.x_type);
@@ -73,6 +73,9 @@ $(function () {
self.y_relative_path(values.y_relative_path);
self.y_relative_path_loop(values.y_relative_path_loop);
self.y_relative_path_invert_loop(values.y_relative_path_invert_loop);
+ if (typeof values.wait_for_moves_to_finish !== 'undefined') {
+ self.wait_for_moves_to_finish(values.wait_for_moves_to_finish);
+ }
};
self.automatic_configuration = new Octolapse.ProfileLibraryViewModel(
@@ -106,23 +109,21 @@ $(function () {
Octolapse.StabilizationProfileValidationRules = {
rules: {
- name: "required"
- , stabilization_type: "required"
- , x_type: "required"
- , x_fixed_coordinate: {number: true, required: true}
- , x_fixed_path: {required: true, csvFloat: true}
- , x_relative: {required: true, number: true, min: 0.0, max: 100.0}
- , x_relative_path: {required: true, csvRelative: true}
- , y_type: "required"
- , y_fixed_coordinate: {number: true, required: true}
- , y_fixed_path: {required: true, csvFloat: true}
- , y_relative: {required: true, number: true, min: 0.0, max: 100.0}
- , y_relative_path: {required: true, csvRelative: true},
- // Rules formerly belonging to snapshot profile
-
+ octolapse_stabilization_name: "required"
+ , octolapse_stabilization_stabilization_type: "required"
+ , octolapse_stabilization_x_type: "required"
+ , octolapse_stabilization_x_fixed_coordinate: {number: true, required: true}
+ , octolapse_stabilization_x_fixed_path: {required: true, csvFloat: true}
+ , octolapse_stabilization_x_relative: {required: true, number: true, min: 0.0, max: 100.0}
+ , octolapse_stabilization_x_relative_path: {required: true, csvRelative: true}
+ , octolapse_stabilization_y_type: "required"
+ , octolapse_stabilization_y_fixed_coordinate: {number: true, required: true}
+ , octolapse_stabilization_y_fixed_path: {required: true, csvFloat: true}
+ , octolapse_stabilization_y_relative: {required: true, number: true, min: 0.0, max: 100.0}
+ , octolapse_stabilization_y_relative_path: {required: true, csvRelative: true},
},
messages: {
- name: "Please enter a name for your profile",
+ octolapse_stabilization_name: "Please enter a name for your profile",
}
};
});
diff --git a/octoprint_octolapse/static/js/octolapse.profiles.trigger.js b/octoprint_octolapse/static/js/octolapse.profiles.trigger.js
index 8e21d35b..9212a627 100644
--- a/octoprint_octolapse/static/js/octolapse.profiles.trigger.js
+++ b/octoprint_octolapse/static/js/octolapse.profiles.trigger.js
@@ -1,7 +1,7 @@
/*
##################################################################################
# Octolapse - A plugin for OctoPrint used for making stabilized timelapse videos.
-# Copyright (C) 2017 Brad Hochgesang
+# Copyright (C) 2023 Brad Hochgesang
##################################################################################
# This program is free software: you can redistribute it and/or modify
# it under the terms of the GNU Affero General Public License as published
@@ -23,7 +23,7 @@
*/
$(function () {
Octolapse.TriggerProfileViewModel = function (values) {
-
+
var self = this;
self.profileTypeName = ko.observable("Trigger");
self.guid = ko.observable(values.guid);
@@ -31,13 +31,12 @@ $(function () {
self.description = ko.observable(values.description);
self.trigger_type = ko.observable(values.trigger_type);
// Pre-calculated trigger options
- self.snap_to_print_disable_z_lift = ko.observable(values.snap_to_print_disable_z_lift);
- self.fastest_speed = ko.observable(values.fastest_speed);
self.smart_layer_trigger_type = ko.observable(values.smart_layer_trigger_type);
- self.smart_layer_trigger_speed_threshold = ko.observable(values.smart_layer_trigger_speed_threshold);
- self.smart_layer_trigger_distance_threshold_percent = ko.observable(values.smart_layer_trigger_distance_threshold_percent);
- self.smart_layer_snap_to_print = ko.observable(values.smart_layer_snap_to_print);
+ self.smart_layer_snap_to_print_high_quality = ko.observable(values.smart_layer_snap_to_print_high_quality);
+ self.smart_layer_snap_to_print_smooth = ko.observable(values.smart_layer_snap_to_print_smooth);
+
self.smart_layer_disable_z_lift = ko.observable(values.smart_layer_disable_z_lift);
+ self.allow_smart_snapshot_commands = ko.observable(values.allow_smart_snapshot_commands);
self.trigger_subtype = ko.observable(values.trigger_subtype);
/*
Timer Trigger Settings
@@ -47,7 +46,7 @@ $(function () {
Layer/Height Trigger Settings
*/
self.layer_trigger_height = ko.observable(values.layer_trigger_height);
-
+
/*
* Quaity Settiings
*/
@@ -64,16 +63,17 @@ $(function () {
self.trigger_on_deretracting = ko.observable(values.trigger_on_deretracting);
self.trigger_on_deretracted = ko.observable(values.trigger_on_deretracted);
self.require_zhop = ko.observable(values.require_zhop);
-
+
/*
* Position Restrictions
* */
self.position_restrictions_enabled = ko.observable(values.position_restrictions_enabled);
- self.position_restrictions = ko.observableArray([]);
+ var position_restrictions = [];
for (var index = 0; index < values.position_restrictions.length; index++) {
- self.position_restrictions.push(
+ position_restrictions.push(
ko.observable(values.position_restrictions[index]));
}
+ self.position_restrictions = ko.observableArray(position_restrictions);
// Temporary variables to hold new layer position restrictions
self.new_position_restriction_type = ko.observable('required');
@@ -84,13 +84,14 @@ $(function () {
self.new_position_restriction_y2 = ko.observable(1);
self.new_position_restriction_r = ko.observable(1);
self.new_calculate_intersections = ko.observable(false);
-
+ // Hold the parent dialog.
+ self.dialog = null;
self.get_trigger_subtype_options = ko.pureComputed( function () {
- if (self.trigger_type() !== 'real-time') {
+ if (self.trigger_type() == 'smart') {
var options = [];
for (var index = 0; index < Octolapse.Triggers.profileOptions.trigger_subtype_options.length; index++) {
var curItem = Octolapse.Triggers.profileOptions.trigger_subtype_options[index];
- if (curItem.value !== 'layer') {
+ if (curItem.value == 'timer') {
continue;
}
options.push(curItem);
@@ -122,6 +123,11 @@ $(function () {
self.addPositionRestriction = function () {
//console.log("Adding " + type + " position restriction.");
+ if (!self.dialog.IsValid())
+ {
+ return;
+ }
+
var restriction = ko.observable({
"type": self.new_position_restriction_type(),
"shape": self.new_position_restriction_shape(),
@@ -139,19 +145,16 @@ $(function () {
//console.log("Removing restriction at index: " + index);
self.position_restrictions.splice(index, 1);
};
-
+
self.updateFromServer = function(values) {
- self.guid(values.guid);
self.name(values.name);
self.description(values.description);
self.trigger_type(values.trigger_type);
- self.snap_to_print_disable_z_lift(values.snap_to_print_disable_z_lift);
- self.fastest_speed(values.fastest_speed);
+ self.smart_layer_snap_to_print_high_quality(values.smart_layer_snap_to_print_high_quality);
+ self.smart_layer_snap_to_print_smooth(values.smart_layer_snap_to_print_smooth);
self.smart_layer_trigger_type(values.smart_layer_trigger_type);
- self.smart_layer_trigger_speed_threshold(values.smart_layer_trigger_speed_threshold);
- self.smart_layer_trigger_distance_threshold_percent(values.smart_layer_trigger_distance_threshold_percent);
- self.smart_layer_snap_to_print(values.smart_layer_snap_to_print);
self.smart_layer_disable_z_lift(values.smart_layer_disable_z_lift);
+ self.allow_smart_snapshot_commands(values.allow_smart_snapshot_commands);
self.trigger_subtype(values.trigger_subtype);
self.timer_trigger_seconds(values.timer_trigger_seconds);
self.layer_trigger_height(values.layer_trigger_height);
@@ -168,11 +171,12 @@ $(function () {
self.trigger_on_deretracted(values.trigger_on_deretracted);
self.require_zhop(values.require_zhop);
self.position_restrictions_enabled(values.position_restrictions_enabled);
- self.position_restrictions([]);
+ var position_restrictions = [];
for (var index = 0; index < values.position_restrictions.length; index++) {
- self.position_restrictions.push(
+ position_restrictions.push(
ko.observable(values.position_restrictions[index]));
}
+ self.position_restrictions(position_restrictions);
};
self.automatic_configuration = new Octolapse.ProfileLibraryViewModel(
@@ -187,11 +191,19 @@ $(function () {
{
// need to remove the parent link from the automatic configuration to prevent a cyclic copy
var parent = self.automatic_configuration.parent;
+ var dialog = self.dialog;
+ self.dialog = null;
self.automatic_configuration.parent = null;
var copy = ko.toJS(self);
+ self.dialog = dialog;
self.automatic_configuration.parent = parent;
return copy;
};
+
+ self.on_opened = function(dialog)
+ {
+ self.dialog = dialog;
+ };
self.on_closed = function(){
self.automatic_configuration.on_closed();
};
@@ -207,24 +219,18 @@ $(function () {
rules: {
- name: "required",
- new_position_restriction_x: { lessThan: "#octolapse_trigger_new_position_restriction_x2:visible" },
- new_position_restriction_x2: { greaterThan: "#octolapse_trigger_new_position_restriction_x:visible" },
- new_position_restriction_y: { lessThan: "#octolapse_trigger_new_position_restriction_y2:visible" },
- new_position_restriction_y2: { greaterThan: "#octolapse_trigger_new_position_restriction_y:visible" },
- layer_trigger_enabled: {check_one: ".octolapse_trigger_enabled"},
- gcode_trigger_enabled: {check_one: ".octolapse_trigger_enabled"},
- timer_trigger_enabled: {check_one: ".octolapse_trigger_enabled"},
+ octolapse_trigger_name: "required",
+ octolapse_trigger_new_position_restriction_x: { lessThan: "#octolapse_trigger_new_position_restriction_x2:visible" },
+ octolapse_trigger_new_position_restriction_x2: { greaterThan: "#octolapse_trigger_new_position_restriction_x:visible" },
+ octolapse_trigger_new_position_restriction_y: { lessThan: "#octolapse_trigger_new_position_restriction_y2:visible" },
+ octolapse_trigger_new_position_restriction_y2: { greaterThan: "#octolapse_trigger_new_position_restriction_y:visible" },
},
messages: {
- name: "Please enter a name for your profile",
- new_position_restriction_x : { lessThan: "Must be less than the 'X2' field." },
- new_position_restriction_x2: { greaterThan: "Must be greater than the 'X' field." },
- new_position_restriction_y: { lessThan: "Must be less than the 'Y2." },
- new_position_restriction_y2: { greaterThan: "Must be greater than the 'Y' field." },
- layer_trigger_enabled: {check_one: "No triggers are enabled. You must enable at least one trigger."},
- gcode_trigger_enabled: {check_one: "No triggers are enabled. You must enable at least one trigger."},
- timer_trigger_enabled: {check_one: "No triggers are enabled. You must enable at least one trigger."},
+ octolapse_trigger_name: "Please enter a name for your profile",
+ octolapse_trigger_new_position_restriction_x : { lessThan: "Must be less than the 'X2' field." },
+ octolapse_trigger_new_position_restriction_x2: { greaterThan: "Must be greater than the 'X' field." },
+ octolapse_trigger_new_position_restriction_y: { lessThan: "Must be less than the 'Y2." },
+ octolapse_trigger_new_position_restriction_y2: { greaterThan: "Must be greater than the 'Y' field." },
}
};
});
diff --git a/octoprint_octolapse/static/js/octolapse.settings.import.js b/octoprint_octolapse/static/js/octolapse.settings.import.js
index 69509810..7c57d724 100644
--- a/octoprint_octolapse/static/js/octolapse.settings.import.js
+++ b/octoprint_octolapse/static/js/octolapse.settings.import.js
@@ -1,7 +1,7 @@
/*
##################################################################################
# Octolapse - A plugin for OctoPrint used for making stabilized timelapse videos.
-# Copyright (C) 2017 Brad Hochgesang
+# Copyright (C) 2023 Brad Hochgesang
##################################################################################
# This program is free software: you can redistribute it and/or modify
# it under the terms of the GNU Affero General Public License as published
@@ -39,20 +39,20 @@ $(function () {
self.$importFileUploadElement = null;
self.$progressBar = null;
self.current_upload_data = null;
- self.initialize = function() {
+ self.initialize = function () {
self.initSettingsFileUpload();
};
- self.update = function(settings) {
+ self.update = function (settings) {
self.options.import_methods(settings.global_options.import_options.settings_import_methods);
};
- self.importSettings = function(){
+ self.importSettings = function () {
if (self.import_method() == 'text') {
//console.log("Importing Settings from Text");
var data = {
'import_method': self.import_method(),
- 'import_text' : self.import_text(),
+ 'import_text': self.import_text(),
'client_id': Octolapse.Globals.client_id
};
$.ajax({
@@ -62,11 +62,26 @@ $(function () {
contentType: "application/json",
dataType: "json",
success: function (data) {
+ var message = data.msg;
+ if (!data.success) {
+ var options = {
+ title: 'Unable To Import Settings',
+ text: message,
+ type: 'error',
+ hide: false,
+ addclass: "octolapse",
+ desktop: {
+ desktop: false
+ }
+ };
+ Octolapse.displayPopupForKey(options, "settings_import_error", ["settings_import_error"]);
+ return;
+ }
self.import_text("");
var settings = JSON.parse(data.settings);
- var message = data.msg;
+
Octolapse.Settings.updateSettings(settings);
- Octolapse.Globals.update(settings.main_settings);
+ Octolapse.Globals.main_settings.update(settings.main_settings);
// maybe add a success popup?
var options = {
title: 'Settings Imported',
@@ -75,11 +90,12 @@ $(function () {
hide: true,
addclass: "octolapse",
desktop: {
- desktop: true
+ desktop: false
}
};
Octolapse.displayPopup(options);
self.closeSettingsImportPopup();
+ Octolapse.Settings.checkForProfileUpdates();
},
error: function (XMLHttpRequest, textStatus, errorThrown) {
var message = "Unable to import the provided settings:( Status: " + textStatus + ". Error: " + errorThrown;
@@ -90,15 +106,13 @@ $(function () {
hide: false,
addclass: "octolapse",
desktop: {
- desktop: true
+ desktop: false
}
};
Octolapse.displayPopup(options);
}
});
- }
- else
- {
+ } else {
//console.log("Importing Settings from File");
if (self.current_upload_data != null) {
self.current_upload_data.submit();
@@ -108,16 +122,16 @@ $(function () {
};
self.submitFileData = null;
- self.hasImportSettingsFile = function(){
+ self.hasImportSettingsFile = function () {
return self.current_upload_data != null;
};
- self.initSettingsFileUpload = function(){
+ self.initSettingsFileUpload = function () {
// Set up the file upload button.
- self.$importFileUploadElement = $('#octolapse_settings_import_path_upload');
- var $progressBarContainer = $('#octolapse_upload_settings_progress');
- self.$progressBar = $progressBarContainer.find('.progress-bar');
- self.$importFileUploadElement.fileupload({
+ self.$importFileUploadElement = $('#octolapse_settings_import_path_upload');
+ var $progressBarContainer = $('#octolapse_upload_settings_progress');
+ self.$progressBar = $progressBarContainer.find('.progress-bar');
+ self.$importFileUploadElement.fileupload({
dataType: "json",
maxNumberOfFiles: 1,
autoUpload: false,
@@ -128,10 +142,10 @@ $(function () {
// maxChunkSize: 100000,
formData: {client_id: Octolapse.Globals.client_id},
dropZone: "#octolapse_settings_import_dialog .octolapse_dropzone",
- add: function(e, data) {
+ add: function (e, data) {
//console.log("Adding file");
self.$progressBar.text("");
- self.$progressBar.removeClass('failed').animate({'width': '0%'}, {'queue':false});
+ self.$progressBar.removeClass('failed').animate({'width': '0%'}, {'queue': false});
self.current_upload_data = data;
self.$dialog.validator.form();
self.import_file_path(data.files[0].name);
@@ -145,17 +159,32 @@ $(function () {
//console.log("Uploading Progress");
var progress = parseInt(data.loaded / data.total * 100, 10);
self.$progressBar.text(progress + "%");
- self.$progressBar.animate({'width': progress + '%'}, {'queue':false});
+ self.$progressBar.animate({'width': progress + '%'}, {'queue': false});
},
- done: function(e, data) {
+ done: function (e, data) {
//console.log("Upload Done");
- var settings = JSON.parse(data.result.settings);
var message = data.result.msg;
+ if (!data.result.success) {
+ var options = {
+ title: 'Unable To Import Settings',
+ text: message,
+ type: 'error',
+ hide: false,
+ addclass: "octolapse",
+ desktop: {
+ desktop: false
+ }
+ };
+ Octolapse.displayPopupForKey(options, "settings_import_error", ["settings_import_error"]);
+ return;
+ }
+ var settings = JSON.parse(data.result.settings);
+
Octolapse.Settings.updateSettings(settings);
- Octolapse.Globals.update(settings.main_settings);
+ Octolapse.Globals.main_settings.update(settings.main_settings);
self.$progressBar.text("");
- self.$progressBar.animate({'width': '0%'}, {'queue':false});
+ self.$progressBar.animate({'width': '0%'}, {'queue': false});
self.closeSettingsImportPopup();
// maybe add a success popup?
var options = {
@@ -165,21 +194,22 @@ $(function () {
hide: true,
addclass: "octolapse",
desktop: {
- desktop: true
+ desktop: false
}
};
Octolapse.displayPopup(options);
+ Octolapse.Settings.checkForProfileUpdates();
},
- fail: function(e, data) {
+ fail: function (e, data) {
//console.log("Upload Failed");
self.$progressBar.text("Failed...").addClass('failed');
- self.$progressBar.animate({'width': '100%'}, {'queue':false});
+ self.$progressBar.animate({'width': '100%'}, {'queue': false});
},
- complete: function(e){
+ complete: function (e) {
//console.log("Upload Complete");
self.import_file_path("");
}
- });
+ });
};
self.showSettingsImportPopup = function () {
@@ -201,18 +231,18 @@ $(function () {
messages: Octolapse.SettingsImportValidationRules.messages,
ignore: ".ignore_hidden_errors:hidden, .ignore_hidden_errors.hiding",
errorPlacement: function (error, element) {
- var error_id = $(element).attr("id");
- var $field_error = $(".error_label_container[data-error-for='" + error_id + "']");
+ var error_id = $(element).attr("name");
+ var $field_error = self.$dialog.$editDialog.find(".error_label_container[data-error-for='" + error_id + "']");
$field_error.html(error);
},
highlight: function (element, errorClass) {
- var error_id = $(element).attr("id");
- var $field_error = $(".error_label_container[data-error-for='" + error_id + "']");
+ var error_id = $(element).attr("name");
+ var $field_error = self.$dialog.$editDialog.find(".error_label_container[data-error-for='" + error_id + "']");
$field_error.removeClass("checked");
$field_error.addClass(errorClass);
},
unhighlight: function (element, errorClass) {
- var error_id = $(element).attr("id");
+ var error_id = self.$dialog.$editDialog.find(element).attr("name");
var $field_error = $(".error_label_container[data-error-for='" + error_id + "']");
$field_error.addClass("checked");
$field_error.removeClass(errorClass);
@@ -233,21 +263,20 @@ $(function () {
$(label).parent().parent().parent().removeClass('error');
},
onfocusout: function (element, event) {
- setTimeout(function() {
- if(self.$dialog.validator)
- {
+ setTimeout(function () {
+ if (self.$dialog.validator) {
self.$dialog.validator.form();
}
}, 250);
},
onclick: function (element, event) {
- setTimeout(function() {
+ setTimeout(function () {
self.$dialog.validator.form();
self.resize();
}, 250);
}
};
- self.resize = function(){
+ self.resize = function () {
/*self.$dialog.$editDialog.css("top","0px").css(
'margin-top',
Math.max(0 - self.$dialog.$editDialog.height() / 2, 0)
@@ -291,8 +320,7 @@ $(function () {
//console.log("Importing Settings.");
// the form is valid, add or update the profile
self.importSettings();
- }
- else {
+ } else {
// Search for any hidden elements that are invalid
//console.log("Checking ofr hidden field error");
var $fieldErrors = self.$dialog.$editForm.find('.error_label_container.error');
@@ -304,7 +332,7 @@ $(function () {
//console.log("Hidden error found, showing");
var $collapsableContainer = $errorContainer.parents(".collapsible");
if ($collapsableContainer.length > 0)
- // The containers may be nested, show each
+ // The containers may be nested, show each
$collapsableContainer.each(function (index, container) {
//console.log("Showing the collapsed container");
$(container).show();
@@ -324,8 +352,7 @@ $(function () {
});
// see if the current viewmodel has an on_opened function
- if (typeof self.on_opened === 'function')
- {
+ if (typeof self.on_opened === 'function') {
// call the function
self.on_opened();
}
@@ -335,40 +362,38 @@ $(function () {
maxHeight: function () {
return Math.max(
- window.innerHeight -
+ window.innerHeight -
self.$dialog.$modalHeader.outerHeight() -
self.$dialog.$modalFooter.outerHeight() - 66,
- 200
+ 200
);
}
}
);
};
self.can_hide = false;
- self.closeSettingsImportPopup = function() {
+ self.closeSettingsImportPopup = function () {
if (self.$dialog != null) {
self.can_hide = true;
self.$dialog.$editDialog.modal("hide");
}
};
- self.on_opened = function(){
+ self.on_opened = function () {
//console.log("Opening settings import dialog.")
- if(self.$importFileUploadElement === null)
+ if (self.$importFileUploadElement === null)
return;
self.$importFileUploadElement.empty();
self.import_file_path("");
self.$progressBar.text("");
- self.$progressBar.animate({'width': '0%'}, {'queue':false});
+ self.$progressBar.animate({'width': '0%'}, {'queue': false});
};
Octolapse.SettingsImportValidationRules = {
rules: {
- octolapse_settings_import_path_upload: { uploadFileRequired: [self.hasImportSettingsFile]},
+ octolapse_settings_import_path_upload: {uploadFileRequired: [self.hasImportSettingsFile]},
},
- messages: {
-
- }
+ messages: {}
};
diff --git a/octoprint_octolapse/static/js/octolapse.settings.js b/octoprint_octolapse/static/js/octolapse.settings.js
index d210175f..dfa72da7 100644
--- a/octoprint_octolapse/static/js/octolapse.settings.js
+++ b/octoprint_octolapse/static/js/octolapse.settings.js
@@ -1,7 +1,7 @@
/*
##################################################################################
# Octolapse - A plugin for OctoPrint used for making stabilized timelapse videos.
-# Copyright (C) 2017 Brad Hochgesang
+# Copyright (C) 2023 Brad Hochgesang
##################################################################################
# This program is free software: you can redistribute it and/or modify
# it under the terms of the GNU Affero General Public License as published
@@ -37,6 +37,7 @@ $(function () {
"templateName": "empty-template",
"profileObservable": ko.observable()
});
+ Octolapse.MainSettingsDisplay = new Octolapse.MainSettingsEditViewModel();
// Assign the Octoprint settings to our namespace
Octolapse.Settings.global_settings = parameters[0];
Octolapse.Settings.is_loaded = ko.observable(false);
@@ -45,12 +46,6 @@ $(function () {
Octolapse.SettingsImport = new Octolapse.SettingsImportViewModel();
// Called before octoprint binds the viewmodel to the plugin
self.onBeforeBinding = function () {
- /*
- Create our global settings
- */
- self.settings = self.global_settings.settings.plugins.octolapse;
- var settings = ko.toJS(self.settings); // just get the values
-
/**
* Profiles - These are bound by octolapse.profiles.js
*/
@@ -93,7 +88,7 @@ $(function () {
, 'setCurrentProfilePath': 'setCurrentProfile'
};
Octolapse.Stabilizations = new Octolapse.ProfilesViewModel(stabilizationSettings);
-
+
/*
Create our triggers view model
*/
@@ -113,7 +108,7 @@ $(function () {
, 'setCurrentProfilePath': 'setCurrentProfile'
};
Octolapse.Triggers = new Octolapse.ProfilesViewModel(triggerSettings);
-
+
/*
Create our rendering view model
*/
@@ -154,24 +149,24 @@ $(function () {
Octolapse.Cameras = new Octolapse.ProfilesViewModel(cameraSettings);
/*
- Create our debug view model
+ Create our logging view model
*/
- var debugSettings =
+ var loggingSettings =
{
'current_profile_guid': null,
'profiles': [],
'default_profile': null,
'profileOptions': {},
- 'profileViewModelCreateFunction': Octolapse.DebugProfileViewModel,
- 'profileValidationRules': Octolapse.DebugProfileValidationRules,
- 'bindingElementId': 'octolapse_debug_tab',
- 'addEditTemplateName': 'debug-template',
- 'profileTypeName': 'Debug',
+ 'profileViewModelCreateFunction': Octolapse.LoggingProfileViewModel,
+ 'profileValidationRules': Octolapse.LoggingProfileValidationRules,
+ 'bindingElementId': 'octolapse_logging_tab',
+ 'addEditTemplateName': 'logging-profile-template',
+ 'profileTypeName': 'Logging',
'addUpdatePath': 'addUpdateProfile',
'removeProfilePath': 'removeProfile',
'setCurrentProfilePath': 'setCurrentProfile'
};
- Octolapse.DebugProfiles = new Octolapse.ProfilesViewModel(debugSettings);
+ Octolapse.LoggingProfiles = new Octolapse.ProfilesViewModel(loggingSettings);
};
@@ -187,63 +182,68 @@ $(function () {
// GlobalOptions
Octolapse.SettingsImport.update(settings);
// SettingsMain
- Octolapse.SettingsMain.update(settings.main_settings);
+ Octolapse.MainSettingsDisplay.defaults = settings.profiles.defaults.main_settings;
// Printers
- Octolapse.Printers.profiles([]);
+ var printers = [];
Octolapse.Printers.default_profile(settings.profiles.defaults.printer);
Octolapse.Printers.profileOptions = settings.profiles.options.printer;
Octolapse.Printers.current_profile_guid(settings.profiles.current_printer_profile_guid);
Object.keys(settings.profiles.printers).forEach(function(key) {
- Octolapse.Printers.profiles.push(new Octolapse.PrinterProfileViewModel(settings.profiles.printers[key]));
+ printers.push(new Octolapse.PrinterProfileViewModel(settings.profiles.printers[key]));
});
+ Octolapse.Printers.profiles(printers);
// Stabilizations
- Octolapse.Stabilizations.profiles([]);
+ var stabilizations = [];
Octolapse.Stabilizations.default_profile(settings.profiles.defaults.stabilization);
Octolapse.Stabilizations.profileOptions = settings.profiles.options.stabilization;
Octolapse.Stabilizations.current_profile_guid(settings.profiles.current_stabilization_profile_guid);
Object.keys(settings.profiles.stabilizations).forEach(function(key) {
- Octolapse.Stabilizations.profiles.push(new Octolapse.StabilizationProfileViewModel(settings.profiles.stabilizations[key]));
+ stabilizations.push(new Octolapse.StabilizationProfileViewModel(settings.profiles.stabilizations[key]));
});
+ Octolapse.Stabilizations.profiles(stabilizations);
// Triggers
- Octolapse.Triggers.profiles([]);
+ var triggers = [];
Octolapse.Triggers.default_profile(settings.profiles.defaults.trigger);
Octolapse.Triggers.profileOptions = settings.profiles.options.trigger;
Octolapse.Triggers.current_profile_guid(settings.profiles.current_trigger_profile_guid);
Object.keys(settings.profiles.triggers).forEach(function(key) {
- Octolapse.Triggers.profiles.push(new Octolapse.TriggerProfileViewModel(settings.profiles.triggers[key]));
+ triggers.push(new Octolapse.TriggerProfileViewModel(settings.profiles.triggers[key]));
});
-
+ Octolapse.Triggers.profiles(triggers);
+
// Renderings
- Octolapse.Renderings.profiles([]);
+ var renderings = [];
Octolapse.Renderings.default_profile(settings.profiles.defaults.rendering);
Octolapse.Renderings.profileOptions = settings.profiles.options.rendering;
Octolapse.Renderings.current_profile_guid(settings.profiles.current_rendering_profile_guid);
Object.keys(settings.profiles.renderings).forEach(function(key) {
- Octolapse.Renderings.profiles.push(new Octolapse.RenderingProfileViewModel(settings.profiles.renderings[key]));
+ renderings.push(new Octolapse.RenderingProfileViewModel(settings.profiles.renderings[key]));
});
+ Octolapse.Renderings.profiles(renderings);
// Cameras
- Octolapse.Cameras.profiles([]);
+ var cameras = [];
Octolapse.Cameras.default_profile(settings.profiles.defaults.camera);
Octolapse.Cameras.profileOptions = settings.profiles.options.camera;
//console.log("Creating initial camera profiles.");
Object.keys(settings.profiles.cameras).forEach(function(key) {
- Octolapse.Cameras.profiles.push(new Octolapse.CameraProfileViewModel(settings.profiles.cameras[key]));
+ cameras.push(new Octolapse.CameraProfileViewModel(settings.profiles.cameras[key]));
});
-
- // Debug
- Octolapse.DebugProfiles.profiles([]);
- Octolapse.DebugProfiles.default_profile(settings.profiles.defaults.debug);
- Octolapse.DebugProfiles.profileOptions = settings.profiles.options.debug;
- Octolapse.DebugProfiles.current_profile_guid(settings.profiles.current_debug_profile_guid);
- //console.log("Creating Debug Profiles")
- Object.keys(settings.profiles.debug).forEach(function(key) {
- Octolapse.DebugProfiles.profiles.push(new Octolapse.DebugProfileViewModel(settings.profiles.debug[key]));
+ Octolapse.Cameras.profiles(cameras);
+
+ // Logging
+ var logging_profiles=[];
+ Octolapse.LoggingProfiles.default_profile(settings.profiles.defaults.logging);
+ Octolapse.LoggingProfiles.profileOptions = settings.profiles.options.logging;
+ Octolapse.LoggingProfiles.current_profile_guid(settings.profiles.current_logging_profile_guid);
+ //console.log("Creating Logging Profiles")
+ Object.keys(settings.profiles.logging).forEach(function(key) {
+ logging_profiles.push(new Octolapse.LoggingProfileViewModel(settings.profiles.logging[key]));
});
-
+ Octolapse.LoggingProfiles.profiles(logging_profiles);
Octolapse.Settings.is_loaded(true);
};
@@ -254,7 +254,7 @@ $(function () {
var itemGuid = item.guid();
var matchFound = itemGuid === guid;
if (matchFound)
- return matchFound
+ return matchFound;
}
);
if (index < 0) {
@@ -281,8 +281,8 @@ $(function () {
success: function (newSettings) {
self.updateSettings(newSettings);
- Octolapse.Globals.update(newSettings.main_settings);
- var message = "The default settings have been restored. It is recommended that you restart the OctoPrint server now.";
+ Octolapse.Globals.main_settings.update(newSettings.main_settings);
+ var message = "The default settings have been restored. Octolapse is checking for profile updates now.";
var options = {
title: 'Default Settings Restored',
text: message,
@@ -290,10 +290,11 @@ $(function () {
hide: true,
addclass: "octolapse",
desktop: {
- desktop: true
+ desktop: false
}
};
Octolapse.displayPopup(options);
+ self.checkForProfileUpdates();
},
error: function (XMLHttpRequest, textStatus, errorThrown) {
var message = "Unable to restore the default settings. Status: " + textStatus + ". Error: " + errorThrown;
@@ -304,7 +305,7 @@ $(function () {
hide: false,
addclass: "octolapse",
desktop: {
- desktop: true
+ desktop: false
}
};
Octolapse.displayPopup(options);
@@ -316,20 +317,31 @@ $(function () {
/*
load all settings default settings
*/
- self.loadSettings = function () {
+ self.loadSettings = function (success_callback) {
// If no guid is supplied, this is a new profile. We will need to know that later when we push/update our observable array
$.ajax({
- url: "./plugin/octolapse/loadSettings",
+ url: "./plugin/octolapse/loadSettingsAndState",
type: "POST",
contentType: "application/json",
dataType: "json",
success: function (newSettings) {
- self.updateSettings(newSettings);
- Octolapse.Globals.loadState();
+ self.updateSettings(newSettings.settings);
+ Octolapse.Globals.updateState(newSettings);
+ // Load the current state before running the success callback.
+ //console.log("Settings and state loaded.");
+
+ // Todo: Add an error callback if the current state cannot be loaded
+ if(success_callback)
+ {
+ success_callback();
+ }
+
+
//console.log("Settings have been loaded.");
},
error: function (XMLHttpRequest, textStatus, errorThrown) {
+ // Todo: Add an error callback if the current settings cannot be loaded
var message = "Octolapse was unable to load the current settings. Status: " + textStatus + ". Error: " + errorThrown;
var options = {
title: 'Settings Load Error',
@@ -338,7 +350,7 @@ $(function () {
hide: false,
addclass: "octolapse",
desktop: {
- desktop: true
+ desktop: false
}
};
Octolapse.displayPopup(options);
@@ -374,13 +386,108 @@ $(function () {
Octolapse.Cameras.default_profile(null);
Octolapse.Cameras.current_profile_guid(null);
Octolapse.Cameras.profileOptions = {};
- // Debugs
- Octolapse.DebugProfiles.profiles([]);
- Octolapse.DebugProfiles.default_profile(null);
- Octolapse.DebugProfiles.current_profile_guid(null);
- Octolapse.DebugProfiles.profileOptions = {};
+ // Logging Profiles
+ Octolapse.LoggingProfiles.profiles([]);
+ Octolapse.LoggingProfiles.default_profile(null);
+ Octolapse.LoggingProfiles.current_profile_guid(null);
+ Octolapse.LoggingProfiles.profileOptions = {};
+ };
+
+ self.checkForProfileUpdates = function(is_silent_test){
+ //console.log("Updating Octolapse profiles from the server.");
+ // is_silent_test is optional, make sure it is either true or false
+ is_silent_test = is_silent_test == true;
+ var data = {
+ 'is_silent_test': is_silent_test
+ };
+ $.ajax({
+ url: "./plugin/octolapse/checkForProfileUpdates",
+ type: "POST",
+ data: JSON.stringify(data),
+ contentType: "application/json",
+ dataType: "json",
+ success: function (values) {
+ var available_profile_count = values.available_profile_count;
+ var options;
+ if (available_profile_count > 0)
+ {
+ // Always show profile update confirmation if updates are found at startup
+ self.showProfileUpdateConfirmation(available_profile_count);
+ }
+ else if (!is_silent_test)
+ {
+ // Only report that settings are up-to-date if this is NOT a silent update request
+ options = {
+ title: 'Octolapse Updates',
+ text: "Your Octolapse profiles are all up-to-date.",
+ type: 'success',
+ hide: true,
+ addclass: "octolapse",
+ desktop: {
+ desktop: false
+ }
+ };
+ Octolapse.displayPopupForKey(options, 'update-profile-from-server','update-profile-from-server');
+ }
+ //console.log("Check for updates complete.");
+
+
+ },
+ error: function (XMLHttpRequest, textStatus, errorThrown) {
+
+ var message = "Octolapse was unable to check for updates. Status: " + textStatus + ". Error: " + errorThrown;
+ console.error(message);
+ var options = {
+ title: 'Profile Update Error',
+ text: message,
+ type: 'error',
+ hide: false,
+ addclass: "octolapse",
+ desktop: {
+ desktop: false
+ }
+ };
+ Octolapse.displayPopupForKey(options, 'update-profile-from-server','update-profile-from-server');
+ }
+ });
};
+ self.showProfileUpdateConfirmation = function(num_profiles_available){
+ var message = "There are updates available for " + num_profiles_available.toString() +
+ " profiles. " +
+ "Would you like to apply these updates now?";
+ Octolapse.showConfirmDialog(
+ "update-all-automatic-profiles",
+ "Apply Octolapse Updates",
+ message,
+ function(){
+ var options = {
+ title: 'Octolapse is Updating',
+ text: num_profiles_available.toString() +" update are being applied. Please wait.",
+ type: 'info',
+ hide: false,
+ addclass: "octolapse",
+ desktop: {
+ desktop: false
+ }
+ };
+ Octolapse.displayPopupForKey(options, 'update-profile-from-server','update-profile-from-server');
+ Octolapse.Settings.updateProfilesFromServer();
+ },
+ function() {
+
+ },
+ function() {
+
+ },
+ function(){
+ Octolapse.Settings.suppressServerUpdates();
+ },
+ "Ignore"
+ );
+ };
+
+
self.updateProfilesFromServer = function() {
//console.log("Updating Octolapse profiles from the server.");
@@ -396,28 +503,31 @@ $(function () {
dataType: "json",
success: function (values) {
var message;
+ var title;
//console.log("Octolapse profiles updated from the server.");
var num_updated = values.num_updated;
+ var options = {
+ hide: true,
+ addclass: "octolapse",
+ desktop: {
+ desktop: false
+ }
+ };
if (num_updated > 0) {
var settings = JSON.parse(values.settings);
self.updateSettings(settings);
Octolapse.Globals.loadState();
- message = num_updated.toString() + " Octolapse profiles were updated.";
+ options.title = "Octolapse Update Complete";
+ options.text = num_updated.toString() + " profiles were updated successfully!";
+ options.type = 'success';
}
else
{
- message = "No new updates found. Your Octolapse profiles are up-to-date."
+ options.title = "No Updates Applied";
+ options.text = "Octolapse was already up-to-date.";
+ options.type = 'warning';
}
- var options = {
- title: 'Octolapse Updates',
- text: message,
- type: 'success',
- hide: true,
- addclass: "octolapse",
- desktop: {
- desktop: true
- }
- };
+
Octolapse.displayPopupForKey(options, 'update-profile-from-server','update-profile-from-server');
},
error: function (XMLHttpRequest, textStatus, errorThrown) {
@@ -431,7 +541,7 @@ $(function () {
hide: false,
addclass: "octolapse",
desktop: {
- desktop: true
+ desktop: false
}
};
Octolapse.displayPopupForKey(options, 'update-profile-from-server','update-profile-from-server');
@@ -439,6 +549,17 @@ $(function () {
});
};
+ Octolapse.Settings.UpdateAvailableServerProfiles = function(server_profiles)
+ {
+ Octolapse.Printers.profileOptions.server_profiles = server_profiles["printer"];
+ Octolapse.Stabilizations.profileOptions.server_profiles = server_profiles["stabilization"];
+ Octolapse.Triggers.profileOptions.server_profiles = server_profiles["trigger"];
+ Octolapse.Renderings.profileOptions.server_profiles = server_profiles["rendering"];
+ Octolapse.Cameras.profileOptions.server_profiles = server_profiles["camera"];
+ Octolapse.LoggingProfiles.profileOptions.server_profiles = server_profiles["logging"];
+ };
+
+
self.suppressServerUpdates = function() {
var data = {
'client_id': Octolapse.Globals.client_id
@@ -452,7 +573,7 @@ $(function () {
success: function (newSettings) {
self.updateSettings(newSettings);
Octolapse.Globals.loadState();
- var message = "Update notifications have been suppressed. You can force an update at any time within the main settings page..";
+ var message = "Update notifications have been suppressed. You can force an update at any time within the main settings page.";
var options = {
title: 'Updates Suppressed',
text: message,
@@ -460,7 +581,7 @@ $(function () {
hide: true,
addclass: "octolapse",
desktop: {
- desktop: true
+ desktop: false
}
};
Octolapse.displayPopupForKey(options, 'updates-suppressed','updates-suppressed');
@@ -476,14 +597,13 @@ $(function () {
hide: false,
addclass: "octolapse",
desktop: {
- desktop: true
+ desktop: false
}
};
Octolapse.displayPopupForKey(options, 'updates-suppressed','updates-suppressed');
}
});
};
-
/*
Profile Add/Update routine for showAddEditDialog
*/
@@ -504,8 +624,8 @@ $(function () {
case "camera-template":
Octolapse.Cameras.addUpdateProfile(profile.profileObservable, self.hideAddEditDialog());
break;
- case "debug-template":
- Octolapse.DebugProfiles.addUpdateProfile(profile.profileObservable, self.hideAddEditDialog());
+ case "logging-profile-template":
+ Octolapse.LoggingProfiles.addUpdateProfile(profile.profileObservable, self.hideAddEditDialog());
break;
default:
var message = "Cannot save the object, the template (" + profile.templateName + ") is unknown!";
@@ -516,27 +636,25 @@ $(function () {
hide: false,
addclass: "octolapse",
desktop: {
- desktop: true
+ desktop: false
}
};
Octolapse.displayPopup(options);
break;
}
-
};
-
/*
Modal Dialog Functions
*/
// hide the modal dialog
self.can_hide = false;
self.hideAddEditDialog = function () {
- console.log("Add update dialog will be closed.");
+ //console.log("Add update dialog will be closed.");
self.can_hide = true;
$("#octolapse_add_edit_profile_dialog").modal("hide");
};
self.cancelAddEditDialog = function () {
- console.log("Add update dialog cancelled.");
+ //console.log("Add update dialog cancelled.");
// Hide the dialog
self.hideAddEditDialog();
// see if the current viewmodel has an on_canceled function
@@ -556,10 +674,10 @@ $(function () {
dialog.templateName = options.templateName;
dialog.$addEditDialog = $("#octolapse_add_edit_profile_dialog");
dialog.$addEditForm = dialog.$addEditDialog.find("#octolapse_add_edit_profile_form");
- dialog.$cancelButton = $("button.cancel", dialog.$addEditDialog);
- dialog.$closeIcon = $("a.close", dialog.$addEditDialog);
- dialog.$saveButton = $("button.save", dialog.$addEditDialog);
- dialog.$defaultButton = $("button.set-defaults", dialog.$addEditDialog);
+ dialog.$cancelButton = dialog.$addEditForm.find(".modal-footer button.cancel");
+ dialog.$closeIcon = dialog.$addEditForm.find(".modal-header a.close");
+ dialog.$saveButton = dialog.$addEditForm.find(".modal-footer button.save");
+ dialog.$defaultButton = dialog.$addEditForm.find(".modal-footer button.set-defaults");
dialog.$dialogTitle = $("h3.modal-title", dialog.$addEditDialog);
dialog.$dialogWarningContainer = $("div.dialog-warning", dialog.$addEditDialog);
dialog.$dialogWarningText = $("span", dialog.$dialogWarningContainer);
@@ -571,24 +689,28 @@ $(function () {
dialog.$modalFooter = dialog.$addEditDialog.find(".modal-footer");
// Create all of the validation rules
- var rules = {
+ dialog.rules = {
rules: options.validationRules.rules,
messages: options.validationRules.messages,
ignore: ".ignore_hidden_errors:hidden, .ignore_hidden_errors.hiding",
errorPlacement: function (error, element) {
- var error_id = $(element).attr("id");
- var $field_error = $(".error_label_container[data-error-for='" + error_id + "']");
+ var error_id = $(element).attr("name");
+ var $field_error = dialog.$addEditDialog.find(".error_label_container[data-error-for='" + error_id + "']");
$field_error.html(error);
},
highlight: function (element, errorClass) {
- var error_id = $(element).attr("id");
- var $field_error = $(".error_label_container[data-error-for='" + error_id + "']");
+ if (!element)
+ return;
+ var error_id = $(element).attr("name");
+ var $field_error = dialog.$addEditDialog.find(".error_label_container[data-error-for='" + error_id + "']");
$field_error.removeClass("checked");
$field_error.addClass(errorClass);
},
unhighlight: function (element, errorClass) {
- var error_id = $(element).attr("id");
- var $field_error = $(".error_label_container[data-error-for='" + error_id + "']");
+ if (!element)
+ return;
+ var error_id = $(element).attr("name");
+ var $field_error = dialog.$addEditDialog.find(".error_label_container[data-error-for='" + error_id + "']");
$field_error.addClass("checked");
$field_error.removeClass(errorClass);
},
@@ -624,17 +746,15 @@ $(function () {
}, 250);
}
};
- dialog.resize = function(){
- /*dialog.$addEditDialog.css("top","0px").css(
- 'margin-top',
- Math.max(0 - dialog.$addEditDialog.height() / 2,0)
- );*/
+
+ dialog.resize = function() {
+
};
dialog.validator = null;
// Prevent hiding unless the event was initiated by the hideAddEditDialog function
dialog.$addEditDialog.on("hide.bs.modal", function () {
- console.log("About to hide add edit dialog");
+ //console.log("About to hide add edit dialog");
if (!self.can_hide)
return false;
//return self.can_hide;
@@ -643,15 +763,12 @@ $(function () {
dialog.$errorList.empty();
dialog.$summary.hide();
// Destroy the validator if it exists, both to save on resources, and to clear out any leftover junk.
- if (dialog.validator != null) {
- dialog.validator.destroy();
- dialog.validator = null;
- }
+ dialog.unbind_validation();
// see if the current viewmodel has an on_closed function
if (typeof self.profileObservable().on_closed === 'function')
{
// call the function
- console.log("Closing the profile dialog");
+ //console.log("Closing the profile dialog");
self.profileObservable().on_closed();
}
});
@@ -677,14 +794,14 @@ $(function () {
dialog.$dialogWarningContainer.show();
}
-
+/*
dialog.$addEditDialog.css({
width: 'auto',
'margin-left': function () {
return -($(this).width() / 2);
}
});
-
+*/
// Initialize the profile.
var onShow = Octolapse.Settings.AddEditProfile().profileObservable().onShow;
if (typeof onShow == 'function') {
@@ -693,20 +810,20 @@ $(function () {
});
// Configure the shown event
dialog.$addEditDialog.on("shown.bs.modal", function () {
- console.log("Showing profile settings dialog.");
+ //console.log("Showing profile settings dialog.");
self.can_hide = false;
// Unbind all click events
dialog.$addEditDialog.unbind('click');
// bind any help links
- Octolapse.Help.bindHelpLinks("#octolapse_add_edit_profile_dialog");
- dialog.validator = dialog.$addEditForm.validate(rules);
+ dialog.bind_help_links();
+
dialog.IsValid = function()
{
if (dialog.validator != null)
return dialog.validator.numberOfInvalids() == 0;
return true;
};
- dialog.validator.form();
+
// Remove any click event bindings from the cancel button
dialog.$cancelButton.unbind("click");
dialog.$closeIcon.unbind("click");
@@ -726,7 +843,7 @@ $(function () {
dialog.$saveButton.unbind("click");
// Called when a user clicks the save button on any add/update dialog.
dialog.$saveButton.bind("click", function () {
- console.log("Save button clicked on add/edit profile");
+ //console.log("Save button clicked on add/edit profile");
// now see if the form is valid
if (dialog.$addEditForm.valid()) {
// the form is valid, add or update the profile
@@ -750,7 +867,6 @@ $(function () {
$(container).show();
});
}
-
});
// The form is invalid, add a shake animation to inform the user
@@ -763,22 +879,50 @@ $(function () {
});
- // Resize the dialog
- dialog.resize();
// see if the current viewmodel has an on_opened function
if (typeof self.profileObservable().on_opened === 'function'){
// call the function
- self.profileObservable().on_opened();
+ self.profileObservable().on_opened(dialog);
}
-
+ dialog.bind_validation();
});
+ dialog.unbind_validation = function()
+ {
+ if (dialog.validator != null) {
+ //console.log("octolapse.settings.js - Unbinding validation.");
+ dialog.validator.destroy();
+ dialog.validator = null;
+ }
+ };
+ dialog.bind_validation = function()
+ {
+ if (dialog.validator != null) {
+ dialog.unbind_validation();
+ }
+ dialog.validator = dialog.$addEditForm.validate(dialog.rules);
+ dialog.validator.form();
+ // Sometimes the form doesn't display the validation messages below some fields with dynamic IDs
+ // Due to an update of data. Make sure the validator is called a bit late as a hack fix.
+ // Must investigate this, but probably has something to do with knockout binding templates.
+ setTimeout(function(){
+ if (dialog.validator != null)
+ {
+ dialog.validator.form();
+ }
+ }, 1000);
+
+ };
+ dialog.bind_help_links = function()
+ {
+ Octolapse.Help.bindHelpLinks("#octolapse_add_edit_profile_dialog");
+ };
// Open the add/edit profile dialog
dialog.$addEditDialog.modal({
backdrop: 'static',
resize: true,
maxHeight: function() {
return Math.max(
- window.innerHeight - dialog.$modalHeader.outerHeight()-dialog.$modalFooter.outerHeight()-66,
+ window.outerHeight - dialog.$modalHeader.outerHeight()-dialog.$modalFooter.outerHeight()-66,
200
);
}
diff --git a/octoprint_octolapse/static/js/octolapse.settings.main.js b/octoprint_octolapse/static/js/octolapse.settings.main.js
index 778600ed..c71625a1 100644
--- a/octoprint_octolapse/static/js/octolapse.settings.main.js
+++ b/octoprint_octolapse/static/js/octolapse.settings.main.js
@@ -1,7 +1,7 @@
/*
##################################################################################
# Octolapse - A plugin for OctoPrint used for making stabilized timelapse videos.
-# Copyright (C) 2017 Brad Hochgesang
+# Copyright (C) 2023 Brad Hochgesang
##################################################################################
# This program is free software: you can redistribute it and/or modify
# it under the terms of the GNU Affero General Public License as published
@@ -23,16 +23,8 @@
*/
$(function () {
- Octolapse.MainSettingsViewModel = function (parameters) {
- // Create a reference to this object
+ Octolapse.MainSettingsViewModel = function() {
var self = this;
-
- // Add this object to our Octolapse namespace
- Octolapse.SettingsMain = this;
- // Assign the Octoprint settings to our namespace
- self.global_settings = parameters[0];
-
- // Settings values
self.is_octolapse_enabled = ko.observable();
self.auto_reload_latest_snapshot = ko.observable();
self.auto_reload_frames = ko.observable();
@@ -45,23 +37,39 @@ $(function () {
self.show_trigger_state_changes = ko.observable();
self.show_snapshot_plan_information = ko.observable();
self.preview_snapshot_plans = ko.observable();
+ self.preview_snapshot_plan_autoclose = ko.observable();
+ self.preview_snapshot_plan_seconds = ko.observable();
self.automatic_updates_enabled = ko.observable();
self.automatic_update_interval_days = ko.observable();
- // Informational Values
- self.platform = ko.observable();
-
-
- self.onBeforeBinding = function () {
-
- };
- // Get the dialog element
- self.onAfterBinding = function () {
-
-
-
- };
+ self.snapshot_archive_directory = ko.observable();
+ self.timelapse_directory = ko.observable();
+ self.temporary_directory = ko.observable();
+ self.test_mode_enabled = ko.observable();
+ // rename this so that it never gets updated when saved
+ self.octolapse_version = ko.observable("unknown");
+ self.settings_version = ko.observable("unknown");
+ self.octolapse_git_version = ko.observable(null);
+ // Computed Observables
+ self.preview_snapshot_plan_seconds_text = ko.pureComputed(function(){
+ if (!self.preview_snapshot_plan_seconds())
+ return "unknown";
+ return self.preview_snapshot_plan_seconds().toString();
+ });
+
+ self.github_link = ko.pureComputed(function(){
+ var git_version = self.octolapse_git_version();
+ if (!git_version)
+ return null;
+ // If this is a commit, link to the commit
+ if (self.octolapse_version().includes("+"))
+ {
+ return 'https://github.com/FormerLurker/Octolapse/commit/' + Octolapse.Globals.main_settings.octolapse_git_version();
+ }
+ // This is a release, link to the tag
+ return 'https://github.com/FormerLurker/Octolapse/releases/tag/v' + self.octolapse_version();
+ });
- self.update = function (settings) {
+ self.update = function (settings, defaults) {
//console.log("Updating Main Settings")
self.is_octolapse_enabled(settings.is_octolapse_enabled);
self.auto_reload_latest_snapshot(settings.auto_reload_latest_snapshot);
@@ -74,19 +82,29 @@ $(function () {
self.show_trigger_state_changes(settings.show_trigger_state_changes);
self.show_snapshot_plan_information(settings.show_snapshot_plan_information);
self.preview_snapshot_plans(settings.preview_snapshot_plans);
+ self.preview_snapshot_plan_autoclose(settings.preview_snapshot_plan_autoclose);
+ self.preview_snapshot_plan_seconds(settings.preview_snapshot_plan_seconds);
self.cancel_print_on_startup_error(settings.cancel_print_on_startup_error);
self.automatic_update_interval_days(settings.automatic_update_interval_days);
self.automatic_updates_enabled(settings.automatic_updates_enabled);
-
- //self.platform(settings.platform());
-
+ self.snapshot_archive_directory(settings.snapshot_archive_directory);
+ self.timelapse_directory(settings.timelapse_directory);
+ self.temporary_directory(settings.temporary_directory);
+ self.settings_version(settings.settings_version);
+ self.test_mode_enabled(settings.test_mode_enabled);
+ self.octolapse_version(settings.version || settings.octolapse_version || null);
+ self.octolapse_git_version(settings.git_version || settings.octolapse_git_version || null);
+
+ if (defaults)
+ self.defaults = settings.defaults;
};
self.toggleOctolapse = function(){
- var previousEnabledValue = !Octolapse.Globals.enabled();
+ var newValue = !self.is_octolapse_enabled();
var data = {
- "is_octolapse_enabled": Octolapse.Globals.enabled()
+ "is_octolapse_enabled": newValue,
+ "client_id": Octolapse.Globals.client_id
};
//console.log("Toggling octolapse.")
$.ajax({
@@ -95,8 +113,10 @@ $(function () {
data: JSON.stringify(data),
contentType: "application/json",
dataType: "json",
- success: function () {
-
+ success: function (results) {
+ // update the global value and the local value
+ self.is_octolapse_enabled(newValue);
+ Octolapse.Globals.main_settings.is_octolapse_enabled(newValue);
},
error: function (XMLHttpRequest, textStatus, errorThrown) {
var message = "Unable to enable/disable Octolapse. Status: " + textStatus + ". Error: " + errorThrown;
@@ -107,17 +127,182 @@ $(function () {
hide: false,
addclass: "octolapse",
desktop: {
- desktop: true
+ desktop: false
}
};
Octolapse.displayPopup(options);
+ }
+ });
+ return true;
+ };
- Octolapse.Globals.enabled(previousEnabledValue);
+ self.toggleTestMode = function(){
+
+ var newValue = !self.test_mode_enabled();
+ var data = {
+ "test_mode_enabled": newValue,
+ "client_id": Octolapse.Globals.client_id
+ };
+ //console.log("Toggling test mode.")
+ $.ajax({
+ url: "./plugin/octolapse/setTestMode",
+ type: "POST",
+ data: JSON.stringify(data),
+ contentType: "application/json",
+ dataType: "json",
+ success: function (results) {
+ // update the global value and the local value
+ self.test_mode_enabled(newValue);
+ Octolapse.Globals.main_settings.test_mode_enabled(newValue);
+ },
+ error: function (XMLHttpRequest, textStatus, errorThrown) {
+ var message = "Unable to enable/disable test mode. Status: " + textStatus + ". Error: " + errorThrown;
+ var options = {
+ title: 'Enable/Disable Test Mode Error',
+ text: message,
+ type: 'error',
+ hide: false,
+ addclass: "octolapse",
+ desktop: {
+ desktop: false
+ }
+ };
+ Octolapse.displayPopup(options);
+ }
+ });
+ return true;
+ };
+
+ self.toggleSnapshotPlanPreview = function(){
+
+ var newValue = !self.preview_snapshot_plans();
+ var data = {
+ "preview_snapshot_plans_enabled": newValue,
+ "client_id": Octolapse.Globals.client_id
+ };
+ //console.log("Toggling test mode.")
+ $.ajax({
+ url: "./plugin/octolapse/setPreviewSnapshotPlans",
+ type: "POST",
+ data: JSON.stringify(data),
+ contentType: "application/json",
+ dataType: "json",
+ success: function (results) {
+ // update the global value and the local value
+ self.preview_snapshot_plans(newValue);
+ Octolapse.Globals.main_settings.preview_snapshot_plans(newValue);
+ },
+ error: function (XMLHttpRequest, textStatus, errorThrown) {
+ var message = "Unable to enable/disable preview snapshot plans. Status: " + textStatus + ". Error: " + errorThrown;
+ var options = {
+ title: 'Enable/Disable Preview Snapshot Plans Error',
+ text: message,
+ type: 'error',
+ hide: false,
+ addclass: "octolapse",
+ desktop: {
+ desktop: false
+ }
+ };
+ Octolapse.displayPopup(options);
}
});
return true;
};
+ self.testDirectory = function(type, directory){
+
+ var data = {
+ "type": type,
+ "directory": directory
+ };
+ //console.log("Toggling octolapse.")
+ $.ajax({
+ url: "./plugin/octolapse/testDirectory",
+ type: "POST",
+ data: JSON.stringify(data),
+ contentType: "application/json",
+ dataType: "json",
+ success: function (results) {
+ if (results.success){
+
+ var success_options = {
+ title: 'Directory Test Passed',
+ text: 'The selected directory passed all tests and is ready to be used!',
+ type: 'success',
+ hide: true,
+ addclass: "octolapse"
+ };
+ Octolapse.displayPopupForKey(success_options, "directory_test", ["directory_test"]);
+ }
+ else {
+ var fail_options = {
+ title: 'Directory Test Failed',
+ text: 'Errors were detected - ' + results.error,
+ type: 'error',
+ hide: false,
+ addclass: "octolapse"
+ };
+ Octolapse.displayPopupForKey(fail_options, "camera_settings_failed",["camera_settings_failed"]);
+ }
+ },
+ error: function (XMLHttpRequest, textStatus, errorThrown) {
+ var message = "Unable to test the directory. Status: " + textStatus + ". Error: " + errorThrown;
+ var options = {
+ title: 'Enable/Disable Error',
+ text: message,
+ type: 'error',
+ hide: false,
+ addclass: "octolapse",
+ desktop: {
+ desktop: false
+ }
+ };
+ Octolapse.displayPopup(options);
+ }
+ });
+ return true;
+ };
+
+ self.toJS = function()
+ {
+ // need to remove the parent link from the automatic configuration to prevent a cyclic copy
+ var dialog = self.dialog;
+ self.dialog = null;
+ var js = ko.toJS(self);
+ self.dialog = dialog;
+ return js;
+ };
+
+ Octolapse.MainSettingsValidationRules = {
+ rules: {
+
+ },
+ messages: {
+
+ }
+ };
+ };
+ Octolapse.MainSettingsEditViewModel = function () {
+ // Create a reference to this object
+ var self = this;
+
+ // Settings values
+ self.dialog = {};
+ // Informational Values
+ self.platform = ko.observable();
+
+ self.main_settings = new Octolapse.MainSettingsViewModel();
+ self.defaults = {};
+/*
+ self.onBeforeBinding = function () {
+
+ };
+ // Get the dialog element
+ self.onAfterBinding = function () {
+
+ };
+*/
// hide the modal dialog
self.can_hide = false;
self.hideDialog = function () {
@@ -127,36 +312,19 @@ $(function () {
self.showEditMainSettingsPopup = function () {
//console.log("showing main settings")
- self.is_octolapse_enabled(Octolapse.Globals.enabled());
- self.auto_reload_latest_snapshot(Octolapse.Globals.auto_reload_latest_snapshot());
- self.auto_reload_frames(Octolapse.Globals.auto_reload_frames());
- self.show_navbar_icon(Octolapse.Globals.navbar_enabled());
- self.show_navbar_when_not_printing(Octolapse.Globals.show_navbar_when_not_printing());
- self.show_printer_state_changes(Octolapse.Globals.show_printer_state_changes());
- self.show_position_changes(Octolapse.Globals.show_position_changes());
- self.show_extruder_state_changes(Octolapse.Globals.show_extruder_state_changes());
- self.show_trigger_state_changes(Octolapse.Globals.show_trigger_state_changes());
- self.show_snapshot_plan_information(Octolapse.Globals.show_snapshot_plan_information());
- self.preview_snapshot_plans(Octolapse.Globals.preview_snapshot_plans());
- self.automatic_update_interval_days(Octolapse.Globals.automatic_update_interval_days());
- self.automatic_updates_enabled(Octolapse.Globals.automatic_updates_enabled());
-
- self.cancel_print_on_startup_error(Octolapse.Globals.cancel_print_on_startup_error());
-
- var dialog = this;
- dialog.$editDialog = $("#octolapse_edit_settings_main_dialog");
- dialog.$editForm = $("#octolapse_edit_main_settings_form");
- dialog.$cancelButton = $(".cancel", dialog.$editDialog);
- dialog.$closeIcon = $("a.close", dialog.$editDialog);
- dialog.$saveButton = $(".save", dialog.$editDialog);
- dialog.$defaultButton = $(".set-defaults", dialog.$editDialog);
- dialog.$summary = dialog.$editForm.find("#edit_validation_summary");
- dialog.$errorCount = dialog.$summary.find(".error-count");
- dialog.$errorList = dialog.$summary.find("ul.error-list");
- dialog.$modalBody = dialog.$editDialog.find(".modal-body");
- dialog.$modalHeader = dialog.$editDialog.find(".modal-header");
- dialog.$modalFooter = dialog.$editDialog.find(".modal-footer");
- dialog.rules = {
+ self.dialog.$editDialog = $("#octolapse_edit_settings_main_dialog");
+ self.dialog.$editForm = $("#octolapse_edit_main_settings_form");
+ self.dialog.$cancelButton = $(".cancel", self.dialog.$editDialog);
+ self.dialog.$closeIcon = $("a.close", self.dialog.$editDialog);
+ self.dialog.$saveButton = $(".save", self.dialog.$editDialog);
+ self.dialog.$defaultButton = $(".set-defaults", self.dialog.$editDialog);
+ self.dialog.$summary = self.dialog.$editForm.find("#edit_validation_summary");
+ self.dialog.$errorCount = self.dialog.$summary.find(".error-count");
+ self.dialog.$errorList = self.dialog.$summary.find("ul.error-list");
+ self.dialog.$modalBody = self.dialog.$editDialog.find(".modal-body");
+ self.dialog.$modalHeader = self.dialog.$editDialog.find(".modal-header");
+ self.dialog.$modalFooter = self.dialog.$editDialog.find(".modal-footer");
+ self.dialog.rules = {
rules: Octolapse.MainSettingsValidationRules.rules,
messages: Octolapse.MainSettingsValidationRules.messages,
ignore: ".ignore_hidden_errors:hidden, .ignore_hidden_errors.hiding",
@@ -179,13 +347,13 @@ $(function () {
$field_error.removeClass(errorClass);
},
invalidHandler: function () {
- dialog.$errorCount.empty();
- dialog.$summary.show();
- var numErrors = dialog.validator.numberOfInvalids();
+ self.dialog.$errorCount.empty();
+ self.dialog.$summary.show();
+ var numErrors = self.dialog.validator.numberOfInvalids();
if (numErrors === 1)
- dialog.$errorCount.text("1 field is invalid");
+ self.dialog.$errorCount.text("1 field is invalid");
else
- dialog.$errorCount.text(numErrors + " fields are invalid");
+ self.dialog.$errorCount.text(numErrors + " fields are invalid");
},
errorContainer: "#edit_validation_summary",
success: function (label) {
@@ -195,101 +363,72 @@ $(function () {
},
onfocusout: function (element, event) {
setTimeout(function() {
- if (dialog.validator)
+ if (self.dialog.validator)
{
- dialog.validator.form();
+ self.dialog.validator.form();
}
}, 250);
},
onclick: function (element, event) {
- setTimeout(() => dialog.validator.form(), 250);
+ //setTimeout(() => self.dialog.validator.form(), 250);
setTimeout(function() {
- dialog.validator.form();
- dialog.resize();
+ self.dialog.validator.form();
+ self.dialog.resize();
}, 250);
}
};
- dialog.resize = function(){
- /*
- dialog.$editDialog.css("top","0px").css(
- 'margin-top',
- Math.max(0 - dialog.$editDialog.height() / 2, 0)
- );*/
+ self.dialog.resize = function(){
};
- dialog.validator = null;
+ self.dialog.validator = null;
- dialog.$editDialog.on("hide.bs.modal", function () {
+ self.dialog.$editDialog.on("hide.bs.modal", function () {
if (!self.can_hide)
return false;
// Clear out error summary
- dialog.$errorCount.empty();
- dialog.$errorList.empty();
- dialog.$summary.hide();
+ self.dialog.$errorCount.empty();
+ self.dialog.$errorList.empty();
+ self.dialog.$summary.hide();
// Destroy the validator if it exists, both to save on resources, and to clear out any leftover junk.
- if (dialog.validator != null) {
- dialog.validator.destroy();
- dialog.validator = null;
+ if (self.dialog.validator != null) {
+ self.dialog.validator.destroy();
+ self.dialog.validator = null;
}
});
- dialog.$editDialog.on("shown.bs.modal", function () {
+ self.dialog.$editDialog.on("show.bs.modal", function () {
+ self.main_settings.update(Octolapse.Globals.main_settings.toJS());
+ });
+ self.dialog.$editDialog.on("shown.bs.modal", function () {
self.can_hide = false;
// bind any help links
Octolapse.Help.bindHelpLinks("#octolapse_edit_settings_main_dialog");
// Create all of the validation rules
- dialog.validator = dialog.$editForm.validate(dialog.rules);
+ self.dialog.validator = self.dialog.$editForm.validate(self.dialog.rules);
// Remove any click event bindings from the cancel button
- dialog.$cancelButton.unbind("click");
- dialog.$closeIcon.unbind("click");
+ self.dialog.$cancelButton.unbind("click");
+ self.dialog.$closeIcon.unbind("click");
// Called when the user clicks the cancel button in any add/update dialog
- dialog.$cancelButton.bind("click", self.hideDialog);
- dialog.$closeIcon.bind("click", self.hideDialog);
+ self.dialog.$cancelButton.bind("click", self.hideDialog);
+ self.dialog.$closeIcon.bind("click", self.hideDialog);
// remove any click event bindings from the defaults button
- dialog.$defaultButton.unbind("click");
- dialog.$defaultButton.bind("click", function () {
+ self.dialog.$defaultButton.unbind("click");
+ self.dialog.$defaultButton.bind("click", function () {
// Set the options to the current settings
- self.is_octolapse_enabled(true);
- self.auto_reload_latest_snapshot(true);
- self.auto_reload_frames(5);
- self.show_navbar_icon(true);
- self.show_navbar_when_not_printing(false);
- self.show_printer_state_changes(false);
- self.show_position_changes(false);
- self.show_extruder_state_changes(false);
- self.show_trigger_state_changes(false);
- self.show_snapshot_plan_information(false);
- self.preview_snapshot_plans(false);
- self.automatic_update_interval_days(7);
- self.automatic_updates_enabled(true);
-
+ if (self.defaults)
+ self.main_settings.update(self.defaults);
});
// Remove any click event bindings from the save button
- dialog.$saveButton.unbind("click");
- // Called when a user clicks the save button on any add/update dialog.
- dialog.$saveButton.bind("click", function ()
+ self.dialog.$saveButton.unbind("click");
+ // Called when a user clicks the save button on any add/update self.dialog.
+ self.dialog.$saveButton.bind("click", function ()
{
- if (dialog.$editForm.valid()) {
+ if (self.dialog.$editForm.valid()) {
// the form is valid, add or update the profile
- var data = {
- "is_octolapse_enabled": self.is_octolapse_enabled()
- , "auto_reload_latest_snapshot": self.auto_reload_latest_snapshot()
- , "auto_reload_frames": self.auto_reload_frames()
- , "show_navbar_icon": self.show_navbar_icon()
- , "show_navbar_when_not_printing": self.show_navbar_when_not_printing()
- , "show_printer_state_changes": self.show_printer_state_changes()
- , "show_position_changes": self.show_position_changes()
- , "show_extruder_state_changes": self.show_extruder_state_changes()
- , "show_trigger_state_changes": self.show_trigger_state_changes()
- , "show_snapshot_plan_information": self.show_snapshot_plan_information()
- , "preview_snapshot_plans": self.preview_snapshot_plans()
- , "automatic_update_interval_days": self.automatic_update_interval_days()
- , "automatic_updates_enabled": self.automatic_updates_enabled()
- , "cancel_print_on_startup_error": self.cancel_print_on_startup_error()
- , "client_id": Octolapse.Globals.client_id
- };
+ var data = self.main_settings.toJS();
+ data["client_id"] = Octolapse.Globals.client_id;
//console.log("Saving main settings.")
$.ajax({
url: "./plugin/octolapse/saveMainSettings",
@@ -297,8 +436,26 @@ $(function () {
data: JSON.stringify(data),
contentType: "application/json",
dataType: "json",
- success: function () {
- self.hideDialog();
+ success: function (results) {
+ if (results.success)
+ {
+ self.hideDialog();
+ Octolapse.Globals.main_settings.update(data);
+ }
+ else {
+ var options = {
+ title: 'Main Settings Save Error',
+ text: results.error,
+ type: 'error',
+ hide: false,
+ addclass: "octolapse",
+ desktop: {
+ desktop: false
+ }
+ };
+ Octolapse.displayPopupForKey(options, "settings-error", ["settings-error"]);
+ }
+
},
error: function (XMLHttpRequest, textStatus, errorThrown) {
var message = "Unable to save the main settings. Status: " + textStatus + ". Error: " + errorThrown;
@@ -309,7 +466,7 @@ $(function () {
hide: false,
addclass: "octolapse",
desktop: {
- desktop: true
+ desktop: false
}
};
Octolapse.displayPopup(options);
@@ -320,7 +477,7 @@ $(function () {
{
// Search for any hidden elements that are invalid
//console.log("Checking ofr hidden field error");
- var $fieldErrors = dialog.$editForm.find('.error_label_container.error');
+ var $fieldErrors = self.dialog.$editForm.find('.error_label_container.error');
$fieldErrors.each(function (index, element) {
// Check to make sure the field is hidden. If it's not, don't bother showing the parent container.
// This can happen if more than one field is invalid in a hidden form
@@ -339,20 +496,20 @@ $(function () {
});
// The form is invalid, add a shake animation to inform the user
- $(dialog.$editDialog).addClass('shake');
+ $(self.dialog.$editDialog).addClass('shake');
// set a timeout so the dialog stops shaking
- setTimeout(function () { $(dialog.$editDialog).removeClass('shake'); }, 500);
+ setTimeout(function () { $(self.dialog.$editDialog).removeClass('shake'); }, 500);
}
});
// Resize the dialog
- dialog.resize();
+ self.dialog.resize();
});
- dialog.$editDialog.modal({
+ self.dialog.$editDialog.modal({
backdrop: 'static',
maxHeight: function() {
return Math.max(
- window.innerHeight - dialog.$modalHeader.outerHeight()-dialog.$modalFooter.outerHeight()-66,
+ window.innerHeight - self.dialog.$modalHeader.outerHeight()-self.dialog.$modalFooter.outerHeight()-66,
200
);
}
@@ -360,15 +517,9 @@ $(function () {
};
- Octolapse.MainSettingsValidationRules = {
- rules: {
-
- },
- messages: {
- }
- };
};
+
// Bind the settings view model to the plugin settings element
OCTOPRINT_VIEWMODELS.push([
Octolapse.MainSettingsViewModel
diff --git a/octoprint_octolapse/static/js/octolapse.status.js b/octoprint_octolapse/static/js/octolapse.status.js
index 91113981..9f81c9e3 100644
--- a/octoprint_octolapse/static/js/octolapse.status.js
+++ b/octoprint_octolapse/static/js/octolapse.status.js
@@ -1,7 +1,7 @@
/*
##################################################################################
# Octolapse - A plugin for OctoPrint used for making stabilized timelapse videos.
-# Copyright (C) 2017 Brad Hochgesang
+# Copyright (C) 2023 Brad Hochgesang
##################################################################################
# This program is free software: you can redistribute it and/or modify
# it under the terms of the GNU Affero General Public License as published
@@ -22,6 +22,33 @@
##################################################################################
*/
$(function () {
+
+ Octolapse.CurrentSettingViewModel = function(type, values)
+ {
+ var self = this;
+ // defaults
+ self.guid = values.guid;
+ self.name = values.name;
+ self.description = values.description;
+ if (type === "printer")
+ {
+ self.has_been_saved_by_user = values.has_been_saved_by_user;
+ }
+ else if (type === "stabilization")
+ {
+ self.wait_for_moves_to_finish = values.wait_for_moves_to_finish;
+ }
+ else if (type ==="trigger")
+ {
+ self.trigger_type = values.trigger_type;
+ }
+ else if (type === "camera")
+ {
+ self.enabled = ko.observable(values.enabled);
+ self.enable_custom_image_preferences = values.enable_custom_image_preferences;
+ }
+ };
+
Octolapse.StatusViewModel = function () {
// Create a reference to this object
var self = this;
@@ -32,6 +59,7 @@ $(function () {
self.is_taking_snapshot = ko.observable(false);
self.is_rendering = ko.observable(false);
self.snapshot_count = ko.observable(0);
+ self.snapshot_failed_count = ko.observable(0);
self.snapshot_error = ko.observable(false);
self.waiting_to_render = ko.observable();
self.current_printer_profile_guid = ko.observable();
@@ -39,34 +67,89 @@ $(function () {
self.current_trigger_profile_guid = ko.observable();
self.current_snapshot_profile_guid = ko.observable();
self.current_rendering_profile_guid = ko.observable();
- self.current_debug_profile_guid = ko.observable();
+ self.current_logging_profile_guid = ko.observable();
self.current_settings_showing = ko.observable(true);
self.profiles = ko.observable({
- 'printers': ko.observableArray([{name: "Unknown", guid: "", has_been_saved_by_user: false}]),
- 'stabilizations': ko.observableArray([{name: "Unknown", guid: ""}]),
- 'triggers': ko.observableArray([{name: "Unknown", guid: ""}]),
- 'snapshots': ko.observableArray([{name: "Unknown", guid: ""}]),
- 'renderings': ko.observableArray([{name: "Unknown", guid: ""}]),
- 'cameras': ko.observableArray([{name: "Unknown", guid: "", enabled: false}]),
- 'debug_profiles': ko.observableArray([{name: "Unknown", guid: ""}])
+ 'printers': ko.observableArray([new Octolapse.CurrentSettingViewModel("printer", {name: "Unknown", guid: "", description:"",has_been_saved_by_user: false})]),
+ 'stabilizations': ko.observableArray([new Octolapse.CurrentSettingViewModel("stabilization", {name: "Unknown", guid: "", description:""})]),
+ 'triggers': ko.observableArray([new Octolapse.CurrentSettingViewModel("trigger", {name: "Unknown", guid: "", description:""})]),
+ 'snapshots': ko.observableArray([new Octolapse.CurrentSettingViewModel("snapshot", {name: "Unknown", guid: "", description:""})]),
+ 'renderings': ko.observableArray([new Octolapse.CurrentSettingViewModel("rendering", {name: "Unknown", guid: "", description:""})]),
+ 'cameras': ko.observableArray([new Octolapse.CurrentSettingViewModel("camera", {name: "Unknown", guid: "", description:"", enabled: false})]),
+ 'logging_profiles': ko.observableArray([new Octolapse.CurrentSettingViewModel("logging_profile", {name: "Unknown", guid: "", description:""})])
});
self.is_real_time = ko.observable(true);
+ self.is_test_mode_active = ko.observable(false);
+ self.wait_for_moves_to_finish = ko.observable(false);
self.current_camera_guid = ko.observable(null);
+ self.dialog_rendering_unfinished = new Octolapse.OctolapseDialogRenderingUnfinished();
+ self.dialog_rendering_in_process = new Octolapse.OctolapseDialogRenderingInProcess();
+ self.timelapse_files_dialog = new Octolapse.OctolapseTimelapseFilesDialog();
self.PrinterState = new Octolapse.printerStateViewModel();
self.Position = new Octolapse.positionViewModel();
self.ExtruderState = new Octolapse.extruderStateViewModel();
self.TriggerState = new Octolapse.TriggersStateViewModel();
self.SnapshotPlanState = new Octolapse.snapshotPlanStateViewModel();
- self.WebcamSettings = new Octolapse.WebcamSettingsPopupViewModel();
+ self.webcam_settings_popup = new Octolapse.WebcamSettingsPopupViewModel("octolapse_tab_custom_image_preferences_popup");
self.SnapshotPlanPreview = new Octolapse.SnapshotPlanPreviewPopupViewModel({
on_closed: function(){
self.SnapshotPlanState.is_preview = false;
}
});
- self.IsTabShowing = false;
self.IsLatestSnapshotDialogShowing = false;
self.current_print_volume = null;
self.current_camera_enabled = ko.observable(false);
+ self.show_play_button = ko.observable(false);
+ self.camera_image_states = {};
+ self.current_camera_state_text = ko.observable("");
+ self.canEditSettings = ko.pureComputed(function(){
+ // Get the current camera profile
+ var current_camera = self.getCurrentProfileByGuid(self.profiles().cameras(),self.current_camera_guid());
+ if (current_camera != null)
+ {
+ return current_camera.enable_custom_image_preferences;
+ }
+ return false;
+ });
+
+ self.showWebcamSettings = function(){
+ self.webcam_settings_popup.showWebcamSettingsForGuid(self.current_camera_guid());
+ };
+
+ self.openTimelapseFilesDialog = function() {
+ self.timelapse_files_dialog.open();
+ };
+
+ self.getEnabledButtonText = ko.pureComputed(function(){
+ if (Octolapse.Globals.main_settings.is_octolapse_enabled())
+ {
+ if (self.is_timelapse_active())
+ return "Plugin Enabled and Running";
+ else
+ return "Plugin Enabled";
+ }
+ else{
+ return "Plugin Disabled";
+ }
+ });
+
+ self.open_rendering_text = ko.pureComputed(function(){
+ if(!self.dialog_rendering_unfinished.is_empty())
+ return "Failed Renderings";
+ return "Renderings";
+ });
+
+ self.unfinished_renderings_changed = function(data){
+ if (data.failed)
+ {
+ self.dialog_rendering_unfinished.update(data.failed);
+ }
+ if (data.in_process)
+ {
+ self.dialog_rendering_in_process.update(data.in_process);
+ }
+ };
+
self.showLatestSnapshotDialog = function () {
var $SnapshotDialog = $("#octolapse_latest_snapshot_dialog");
@@ -95,9 +178,9 @@ $(function () {
closeSnapshotDialog($SnapshotDialog);
});
- $SnapshotDialog.find('.snapshot-container').one('click', function() {
+ /*$SnapshotDialog.find('#octolapse_snapshot_image_container').one('click', function() {
closeSnapshotDialog($SnapshotDialog);
- } );
+ } );*/
function closeSnapshotDialog($dialog) {
//console.log("Hiding snapshot dialog.");
@@ -132,10 +215,121 @@ $(function () {
self.onAfterBinding = function () {
self.current_settings_showing.subscribe(function (newData) {
//console.log("Setting local storage (" + self.SETTINGS_VISIBLE_KEY + ") to " + newData);
- Octolapse.setLocalStorage(self.SETTINGS_VISIBLE_KEY, newData)
+ Octolapse.setLocalStorage(self.SETTINGS_VISIBLE_KEY, newData);
});
+ self.dialog_rendering_in_process.on_after_binding();
+ self.dialog_rendering_unfinished.on_after_binding();
+ self.timelapse_files_dialog.on_after_binding();
+ Octolapse.Help.bindHelpLinks("#octolapse_tab");
+ };
+
+ // Update the current tab state
+ self.updateState = function(state){
+ //console.log("octolapse.status.js - Updating State")
+ if (state.trigger_type != null)
+ self.is_real_time(state.trigger_type === "real-time");
+
+ if (state.position != null) {
+ self.Position.update(state.position);
+ }
+ if (state.printer_state != null) {
+ self.PrinterState.update(state.printer_state);
+ }
+ if (state.extruder != null) {
+ self.ExtruderState.update(state.extruder);
+ }
+ if (state.trigger_state != null) {
+ self.TriggerState.update(state.trigger_state);
+ }
+ if (state.snapshot_plan != null) {
+ self.SnapshotPlanState.update(state.snapshot_plan);
+ }
+
+ };
+
+ self.create_current_settings_profile = function(type, values){
+ var profiles = [];
+ if (values)
+ {
+ for (var index=0; index < values.length; index++)
+ {
+ profiles.push(new Octolapse.CurrentSettingViewModel(type, values[index]));
+ }
+ }
+ return profiles;
+ };
+
+ self.load_files = function(){
+ //console.log("ocotlapse.status.js - loading dialog files.");
+ self.timelapse_files_dialog.load();
+ self.dialog_rendering_in_process.load();
+ self.dialog_rendering_unfinished.load();
+ };
+
+ self.files_changed = function(file_info, action){
+ self.timelapse_files_dialog.files_changed(file_info, action);
+ };
+
+ self.update = function (settings) {
+ //console.log("octolapse.status.js - Updating main settings.");
+ if (settings.is_timelapse_active !== undefined)
+ self.is_timelapse_active(settings.is_timelapse_active);
+ if (settings.snapshot_count !== undefined)
+ self.snapshot_count(settings.snapshot_count);
+ if (settings.snapshot_failed_count !== undefined)
+ self.snapshot_failed_count(settings.snapshot_failed_count);
+ if (settings.is_taking_snapshot !== undefined)
+ self.is_taking_snapshot(settings.is_taking_snapshot);
+ if (settings.is_rendering !== undefined)
+ self.is_rendering(settings.is_rendering);
+ if (settings.waiting_to_render !== undefined)
+ self.waiting_to_render(settings.waiting_to_render);
+ if (settings.is_test_mode_active !== undefined)
+ self.is_test_mode_active(settings.is_test_mode_active);
+
+ //console.log("Updating Profiles");
+ if (settings.profiles) {
+ self.profiles().printers(self.create_current_settings_profile("printer", settings.profiles.printers));
+ self.profiles().stabilizations(self.create_current_settings_profile("stabilization", settings.profiles.stabilizations));
+ self.profiles().triggers(self.create_current_settings_profile("trigger", settings.profiles.triggers));
+ self.profiles().renderings(self.create_current_settings_profile("rendering", settings.profiles.renderings));
+ self.profiles().cameras(self.create_current_settings_profile("camera", settings.profiles.cameras));
+ self.profiles().logging_profiles(self.create_current_settings_profile("logging_profile", settings.profiles.logging_profiles));
+ self.current_printer_profile_guid(settings.profiles.current_printer_profile_guid);
+ self.current_stabilization_profile_guid(settings.profiles.current_stabilization_profile_guid);
+ self.current_trigger_profile_guid(settings.profiles.current_trigger_profile_guid);
+ self.current_snapshot_profile_guid(settings.profiles.current_snapshot_profile_guid);
+ self.current_rendering_profile_guid(settings.profiles.current_rendering_profile_guid);
+ self.current_logging_profile_guid(settings.profiles.current_logging_profile_guid);
+ }
+ if (settings.unfinished_renderings)
+ {
+ self.dialog_rendering_in_process.update(settings.unfinished_renderings);
+ self.dialog_rendering_unfinished.update(settings.unfinished_renderings);
+ }
+
+ self.is_real_time(self.getCurrentTriggerProfileIsRealTime());
+ self.current_camera_guid(self.getInitialCameraSelection());
+ self.set_current_camera_enabled();
};
+ self.current_stabilization_profile_guid.subscribe(function(newValue){
+ var current_stabilization_profile = null;
+ for (var i = 0; i < self.profiles().stabilizations().length; i++) {
+ var stabilization_profile = self.profiles().stabilizations()[i];
+ if (stabilization_profile.guid == self.current_stabilization_profile_guid()) {
+ current_stabilization_profile = stabilization_profile;
+ break;
+ }
+ }
+ if (current_stabilization_profile)
+ self.wait_for_moves_to_finish(current_stabilization_profile.wait_for_moves_to_finish);
+ else
+ self.wait_for_moves_to_finish(false);
+ });
+
+
+
// Subscribe to current camera guid changes
self.current_camera_guid.subscribe(function(newValue){
self.snapshotCameraChanged();
@@ -173,12 +367,11 @@ $(function () {
};
self.hasOneCameraEnabled = ko.pureComputed(function(){
- var hasConfigIssue = true;
for (var i = 0; i < self.profiles().cameras().length; i++)
{
- if(self.profiles().cameras()[i].enabled)
+ if(self.profiles().cameras()[i].enabled())
{
- return true
+ return true;
}
}
return false;
@@ -201,7 +394,7 @@ $(function () {
return true;
},this);
- self.is_current_trigger_real_time = function(){
+ self.getCurrentTriggerProfileIsRealTime = function(){
var current_trigger = self.getCurrentProfileByGuid(self.profiles().triggers(),Octolapse.Status.current_trigger_profile_guid());
if (current_trigger != null)
//console.log(current_trigger.trigger_type);
@@ -213,7 +406,7 @@ $(function () {
if (guid != null) {
for (var i = 0; i < profiles.length; i++) {
if (profiles[i].guid == guid) {
- return profiles[i]
+ return profiles[i];
}
}
}
@@ -225,18 +418,6 @@ $(function () {
return hasConfigIssues;
},this);
- self.onTabChange = function (current, previous) {
- if (current != null && current === "#tab_plugin_octolapse") {
- //console.log("Octolapse Tab is showing");
- self.IsTabShowing = true;
- self.updateLatestSnapshotThumbnail(true, true);
-
- }
- else if (previous != null && previous === "#tab_plugin_octolapse") {
- //console.log("Octolapse Tab is not showing");
- self.IsTabShowing = false;
- }
- };
/*
Snapshot client animation preview functions
*/
@@ -255,8 +436,8 @@ $(function () {
}
//console.log("Starting Snapshot Animation for" + targetId);
// Hide and show the play/refresh button
- if (Octolapse.Globals.auto_reload_latest_snapshot()) {
- var $startAnimationButton = $('#' + targetId + ' .snapshot_refresh_container a.start-animation');
+ if (Octolapse.Globals.main_settings.auto_reload_latest_snapshot()) {
+ var $startAnimationButton = $('#' + targetId + ' .octolapse-snapshot-button-overlay a.play');
self.IsAnimating[targetId] = true;
$startAnimationButton.fadeOut({
start: function () {
@@ -267,8 +448,7 @@ $(function () {
if ($images.length > 0)
{
$current.css("opacity","0");
- animate_snapshots($images, $current, $images.length-1, -1, 0, 25)
-
+ animate_snapshots($images, $current, $images.length-1, -1, 0, 25);
}
else
{
@@ -277,8 +457,6 @@ $(function () {
self.IsAnimating[targetId] = false;
return;
}
-
-
function animate_snapshots($images, $current, index, step, opacity, delay) {
if (
(step > 0 && index < $images.length) ||
@@ -287,7 +465,7 @@ $(function () {
{
setTimeout(function () {
$images.eq(index).css("opacity",opacity.toString());
- animate_snapshots($images, $current, index+step, step, opacity, delay)
+ animate_snapshots($images, $current, index+step, step, opacity, delay);
}, delay);
}
else if(step > 0)
@@ -300,7 +478,7 @@ $(function () {
}
else
{
- // fade out the current image
+ // fade out the current image
animate_snapshots($images, $current, 0, 1, 1, 100);
}
@@ -318,22 +496,40 @@ $(function () {
force = force || false;
//console.log("Trying to update the latest snapshot thumbnail.");
if (!force) {
- if (!self.IsTabShowing) {
- //console.log("The tab is not showing, not updating the thumbnail. Clearing the image history.");
- return
- }
- else if (!Octolapse.Globals.auto_reload_latest_snapshot()) {
+ if (!Octolapse.Globals.main_settings.auto_reload_latest_snapshot()) {
//console.log("Not updating the thumbnail, auto-reload is disabled.");
- return
+ return;
}
}
- if (self.current_camera_guid() === null || self.current_camera_guid() === "")
- console.error("Current camera guid requested, but it is null.");
- else
- self.updateSnapshotAnimation('octolapse_snapshot_thumbnail_container', getLatestSnapshotThumbnailUrl(self.current_camera_guid())
- + "&time=" + new Date().getTime());
+ var snapshotUrl = null;
+ if (self.current_camera_guid())
+ {
+ snapshotUrl = getLatestSnapshotThumbnailUrl(self.current_camera_guid())+ "&time=" + new Date().getTime();
+ }
+ self.updateSnapshotAnimation('octolapse_snapshot_thumbnail_container', snapshotUrl);
+ };
+
+ self.updateLatestSnapshotImage = function (force) {
+ force = force || false;
+ //console.log("Trying to update the latest snapshot image.");
+ if (!force) {
+ if (!Octolapse.Globals.main_settings.auto_reload_latest_snapshot()) {
+ //console.log("Auto-Update latest snapshot image is disabled.");
+ return;
+ }
+ else if (!self.IsLatestSnapshotDialogShowing) {
+ //console.log("The full screen dialog is not showing, not updating the latest snapshot.");
+ return;
+ }
+ }
+ var snapshotUrl = null;
+ if (self.current_camera_guid())
+ {
+ snapshotUrl = getLatestSnapshotUrl(self.current_camera_guid())+ "&time=" + new Date().getTime();
+ }
+ self.updateSnapshotAnimation('octolapse_snapshot_image_container', snapshotUrl);
};
self.erasePreviousSnapshotImages = function (targetId, eraseCurrentImage) {
@@ -358,7 +554,9 @@ $(function () {
// Get the latest image
var $latestSnapshotContainer = $target.find('.latest-snapshot');
var $latestSnapshot = $latestSnapshotContainer.find('img');
- if (Octolapse.Globals.auto_reload_latest_snapshot()) {
+ var $fullscreenControl = $target.find("a.octolapse-fullscreen");
+
+ if (Octolapse.Globals.main_settings.auto_reload_latest_snapshot()) {
// Get the previous snapshot container
var $previousSnapshotContainer = $target.find('.previous-snapshots');
@@ -378,8 +576,8 @@ $(function () {
var $previousSnapshots = $previousSnapshotContainer.find("img");
var numSnapshots = $previousSnapshots.length;
-
- while (numSnapshots > parseInt(Octolapse.Globals.auto_reload_frames())) {
+ self.show_play_button(numSnapshots>0);
+ while (numSnapshots > parseInt(Octolapse.Globals.main_settings.auto_reload_frames())) {
//console.log("Removing overflow previous images according to Auto Reload Frames setting.");
var $element = $previousSnapshots.first();
$element.remove();
@@ -396,29 +594,58 @@ $(function () {
$element.css('z-index', previousImageIndex.toString());
}
}
-
+ else
+ {
+ self.show_play_button(false);
+ }
// create the newest image
var $newSnapshot = $(document.createElement('img'));
- // Clear any existing events
- $newSnapshot.off('load');
- $newSnapshot.off('error');
- // append the image to the container
+ self.current_camera_state_text("");
+ $fullscreenControl.hide();
+ // Set the error handler
+ var error_message = "No snapshots have been taken with the current camera. A preview of your" +
+ " timelapse will start to appear here as snapshots are taken by Octolapse.";
+ var on_snapshot_load_error = function(){
+ //console.error("An error occurred loading the newest image, reverting to previous image.");
+ // move the latest preview image back into the newest image section
+ $latestSnapshot.removeClass();
+ $latestSnapshot.appendTo($latestSnapshotContainer);
+ self.current_camera_state_text(error_message);
+
+ };
+
+ if (!newSnapshotAddress)
+ {
+ error_message = "No camera is selected. Choose a camera in the dropdown below.";
+ on_snapshot_load_error(error_message);
+ return;
+ }
+
+ $newSnapshot.one('error', on_snapshot_load_error);
//console.log("Adding the new snapshot image to the latest snapshot container.");
// create on load event for the newest image
- if (Octolapse.Globals.auto_reload_latest_snapshot()) {
+ if (Octolapse.Globals.main_settings.auto_reload_latest_snapshot()) {
// Add the new snapshot to the container
$newSnapshot.appendTo($latestSnapshotContainer);
- $newSnapshot.one('load', function () {
- self.startSnapshotAnimation(targetId);
- });
-
+ if ((!(targetId in self.IsAnimating) || !self.IsAnimating[targetId]))
+ {
+ $newSnapshot.one('load', function () {
+ self.startSnapshotAnimation(targetId);
+ $fullscreenControl.show();
+ });
+ }
+ else {
+ // We could have a race condition here. Need to ensure the opacity of this element is
+ // set to 1 after any animations are finished.
+ $newSnapshot.css("opacity","0");
+ }
}
else {
$newSnapshot.one('load', function () {
+ $fullscreenControl.show();
// Hide the latest image
-
if ($latestSnapshot.length == 1)
{
$latestSnapshot.fadeOut(250, function () {
@@ -444,44 +671,27 @@ $(function () {
}
});
}
- $newSnapshot.one('error', function () {
- //console.log("An error occurred loading the newest image, reverting to previous image.");
- // move the latest preview image back into the newest image section
- $latestSnapshot.removeClass();
- $latestSnapshot.appendTo($latestSnapshotContainer)
-
- });
-
// set the src and start to load
- $newSnapshot.attr('src', newSnapshotAddress)
+ $newSnapshot.attr('src', newSnapshotAddress);
};
- self.updateLatestSnapshotImage = function (force) {
- force = force || false;
- //console.log("Trying to update the latest snapshot image.");
- if (!force) {
- if (!Octolapse.Globals.auto_reload_latest_snapshot()) {
- //console.log("Auto-Update latest snapshot image is disabled.");
- return
- }
- else if (!self.IsLatestSnapshotDialogShowing) {
- //console.log("The full screen dialog is not showing, not updating the latest snapshot.");
- return
- }
- }
- //console.log("Requesting image for camera:" + Octolapse.Status.current_camera_guid())
- if(!(Octolapse.Status.current_camera_guid() == null || Octolapse.Status.current_camera_guid() == ""))
- self.updateSnapshotAnimation('octolapse_snapshot_image_container', getLatestSnapshotUrl(Octolapse.Status.current_camera_guid()) + "&time=" + new Date().getTime());
-
- };
-
- self.toggleInfoPanel = function (panelType){
+ self.toggleInfoPanel = function (observable, panelType){
+ data = {
+ panel_type: panelType,
+ client_id: Octolapse.Globals.client_id
+ };
$.ajax({
url: "./plugin/octolapse/toggleInfoPanel",
type: "POST",
- data: JSON.stringify({panel_type: panelType}),
+ data: JSON.stringify(data),
contentType: "application/json",
dataType: "json",
+ success: function(result){
+ if (result.success)
+ {
+ observable(result.enabled);
+ }
+ },
error: function (XMLHttpRequest, textStatus, errorThrown) {
var message = "Unable to toggle the panel. Status: " + textStatus + ". Error: " + errorThrown;
var options = {
@@ -491,7 +701,7 @@ $(function () {
hide: false,
addclass: "octolapse",
desktop: {
- desktop: true
+ desktop: false
}
};
Octolapse.displayPopup(options);
@@ -511,7 +721,7 @@ $(function () {
case "timer":
return "timer-trigger-status-template";
default:
- return "trigger-status-template"
+ return "trigger-status-template";
}
};
@@ -521,11 +731,11 @@ $(function () {
return "Octolapse is waiting for print to complete.";
if( self.is_rendering())
return "Octolapse is rendering a timelapse.";
- if(!Octolapse.Globals.enabled())
+ if(!Octolapse.Globals.main_settings.is_octolapse_enabled())
return 'Octolapse is disabled.';
return 'Octolapse is enabled and idle.';
}
- if(!Octolapse.Globals.enabled())
+ if(!Octolapse.Globals.main_settings.is_octolapse_enabled())
return 'Octolapse is disabled.';
if(Octolapse.Status.is_real_time())
{
@@ -540,61 +750,15 @@ $(function () {
}, self);
- self.getTimelapseStateText = ko.pureComputed(function () {
- //console.log("GettingTimelapseStateText")
- if(!self.is_timelapse_active())
- return 'Octolapse is not running';
- if(!self.PrinterState.is_initialized())
- return 'Waiting for update from server. You may have to turn on the "Position State Info Panel" from the "Current Settings" below to receive an update.';
- if( self.PrinterState.hasPrinterStateErrors())
- return 'Waiting to initialize';
- return 'Octolapse is initialized and running';
- }, self);
-
- self.getTimelapseStateColor = ko.pureComputed(function () {
- if(!self.is_timelapse_active())
- return '';
- if(self.is_real_time() && (!self.PrinterState.is_initialized() || self.PrinterState.hasPrinterStateErrors()))
- return 'orange';
- return 'greenyellow';
- }, self);
-
self.getStatusText = ko.pureComputed(function () {
if (self.is_timelapse_active() || self.is_rendering())
- return 'Octolapse';
+ return '';
if (self.waiting_to_render())
- return 'Octolapse - Stopped';
- if (Octolapse.Globals.enabled())
- return 'Octolapse';
- return 'Octolapse - Disabled';
+ return 'Timelapse Canceled';
+ return '';
}, self);
- self.updateState = function(state)
- {
-
- //console.log("octolapse.status.js - Updating State")
- if (state.trigger_type != null)
- self.is_real_time(state.trigger_type == "real-time");
-
- if (state.position != null) {
- self.Position.update(state.position);
- }
- if (state.printer_state != null) {
- self.PrinterState.update(state.printer_state);
- }
- if (state.extruder != null) {
- self.ExtruderState.update(state.extruder);
- }
- if (state.trigger_state != null) {
- self.TriggerState.update(state.trigger_state);
- }
- if (state.snapshot_plan != null) {
- self.SnapshotPlanState.update(state.snapshot_plan);
- }
-
- };
- self.previewSnapshotPlans = function(data)
- {
+ self.previewSnapshotPlans = function(data){
//console.log("Updating snapshot plan state with a preview of the snapshot plans");
self.SnapshotPlanState.is_preview = true;
self.SnapshotPlanState.update(data);
@@ -602,35 +766,6 @@ $(function () {
};
- self.update = function (settings) {
- //console.log("octolapse.status.js - Updating main settings.");
- self.is_timelapse_active(settings.is_timelapse_active);
- self.snapshot_count(settings.snapshot_count);
- self.is_taking_snapshot(settings.is_taking_snapshot);
- self.is_rendering(settings.is_rendering);
- self.waiting_to_render(settings.waiting_to_render);
- //console.log("Updating Profiles");
- self.profiles().printers(settings.profiles.printers);
- self.profiles().stabilizations(settings.profiles.stabilizations);
- self.profiles().triggers(settings.profiles.triggers);
- self.profiles().renderings(settings.profiles.renderings);
- self.profiles().cameras(settings.profiles.cameras);
- self.profiles().debug_profiles(settings.profiles.debug_profiles);
- self.current_printer_profile_guid(settings.profiles.current_printer_profile_guid);
- self.current_stabilization_profile_guid(settings.profiles.current_stabilization_profile_guid);
- self.current_trigger_profile_guid(settings.profiles.current_trigger_profile_guid);
- self.current_snapshot_profile_guid(settings.profiles.current_snapshot_profile_guid);
- self.current_rendering_profile_guid(settings.profiles.current_rendering_profile_guid);
- self.current_debug_profile_guid(settings.profiles.current_debug_profile_guid);
-
- self.is_real_time(self.is_current_trigger_real_time());
- self.current_camera_guid(self.getInitialCameraSelection());
- self.set_current_camera_enabled();
- // Update snapshots
- //self.updateLatestSnapshotImage(true);
- //self.updateLatestSnapshotThumbnail(true, false);
- };
-
self.onTimelapseStart = function () {
self.TriggerState.removeAll();
self.PrinterState.is_initialized(false);
@@ -664,7 +799,7 @@ $(function () {
hide: false,
addclass: "octolapse",
desktop: {
- desktop: true
+ desktop: false
}
};
Octolapse.displayPopup(options);
@@ -699,7 +834,8 @@ $(function () {
}
};
// Printer Profile Settings
- self.printers_sorted = ko.computed(function() { return self.nameSort(self.profiles().printers) });
+ self.printers_sorted = ko.computed(function() { return self.nameSort(self.profiles().printers); });
+
self.openCurrentPrinterProfile = function () {
//console.log("Opening current printer profile from tab.")
Octolapse.Printers.showAddEditDialog(self.current_printer_profile_guid(), false);
@@ -721,7 +857,7 @@ $(function () {
};
// Stabilization Profile Settings
- self.stabilizations_sorted = ko.computed(function() { return self.nameSort(self.profiles().stabilizations) });
+ self.stabilizations_sorted = ko.computed(function() { return self.nameSort(self.profiles().stabilizations); });
self.openCurrentStabilizationProfile = function () {
//console.log("Opening current stabilization profile from tab.")
Octolapse.Stabilizations.showAddEditDialog(self.current_stabilization_profile_guid(), false);
@@ -738,8 +874,9 @@ $(function () {
}
};
+
// Trigger Profile Settings
- self.triggers_sorted = ko.computed(function() { return self.nameSort(self.profiles().triggers) });
+ self.triggers_sorted = ko.computed(function() { return self.nameSort(self.profiles().triggers); });
self.openCurrentTriggerProfile = function () {
//console.log("Opening current trigger profile from tab.")
Octolapse.Triggers.showAddEditDialog(self.current_trigger_profile_guid(), false);
@@ -756,9 +893,8 @@ $(function () {
}
};
-
// Rendering Profile Settings
- self.renderings_sorted = ko.computed(function() { return self.nameSort(self.profiles().renderings) });
+ self.renderings_sorted = ko.computed(function() { return self.nameSort(self.profiles().renderings); });
self.openCurrentRenderingProfile = function () {
//console.log("Opening current rendering profile from tab.")
Octolapse.Renderings.showAddEditDialog(self.current_rendering_profile_guid(), false);
@@ -776,21 +912,20 @@ $(function () {
};
// Camera Profile Settings
- self.cameras_sorted = ko.computed(function() { return self.nameSort(self.profiles().cameras) });
-
+ self.cameras_sorted = ko.computed(function() { return self.nameSort(self.profiles().cameras); });
self.openCameraProfile = function (guid) {
//console.log("Opening current camera profile from tab.")
Octolapse.Cameras.showAddEditDialog(guid, false);
};
-
self.addNewCameraProfile = function () {
//console.log("Opening current camera profile from tab.")
Octolapse.Cameras.showAddEditDialog(null, false);
};
-
self.toggleCamera = function (guid) {
//console.log("Opening current camera profile from tab.")
- Octolapse.Cameras.getProfileByGuid(guid).toggleCamera();
+ Octolapse.Cameras.getProfileByGuid(guid).toggleCamera(function(value){
+ self.getCurrentProfileByGuid(self.profiles().cameras(), guid).enabled(value);
+ });
};
self.set_current_camera_enabled = function() {
var current_camera = null;
@@ -802,11 +937,10 @@ $(function () {
}
}
if (current_camera)
- self.current_camera_enabled(current_camera.enabled);
+ self.current_camera_enabled(current_camera.enabled());
else
self.current_camera_enabled(true);
};
-
self.snapshotCameraChanged = function() {
if (self.current_camera_guid()) {
// Set the local storage guid here.
@@ -824,24 +958,61 @@ $(function () {
self.updateLatestSnapshotImage(true);
};
- // Debug Profile Settings
- self.debug_sorted = ko.computed(function() { return self.nameSort(self.profiles().debug_profiles) });
- self.openCurrentDebugProfile = function () {
- //console.log("Opening current debug profile from tab.")
- Octolapse.DebugProfiles.showAddEditDialog(self.current_debug_profile_guid(), false);
+ // Logging Profile Settings
+ self.logging_profiles_sorted = ko.computed(function() { return self.nameSort(self.profiles().logging_profiles); });
+ self.openCurrentLoggingProfile = function () {
+ //console.log("Opening current logging profile from tab.")
+ Octolapse.LoggingProfiles.showAddEditDialog(self.current_logging_profile_guid(), false);
};
- self.defaultDebugProfileChanged = function (obj, event) {
+ self.defaultLoggingProfileChanged = function (obj, event) {
if (Octolapse.Globals.is_admin()) {
if (event.originalEvent) {
// Get the current guid
- var guid = $("#octolapse_tab_debug_profile").val();
- //console.log("Default Debug Profile is changing to " + guid);
- Octolapse.DebugProfiles.setCurrentProfile(guid);
+ var guid = $("#octolapse_tab_logging_profile").val();
+ //console.log("Default Logging Profile is changing to " + guid);
+ Octolapse.LoggingProfiles.setCurrentProfile(guid);
return true;
}
}
};
+ self.setDescriptionAsTitle = function(option, item) {
+ if (!item)
+ return;
+ ko.applyBindingsToNode(option, {attr: {title: item.description}}, item);
+ };
+
+ self.getPrinterProfileTitle = ko.computed(function () {
+ var currentProfile = self.getCurrentProfileByGuid(self.profiles().printers(),Octolapse.Status.current_printer_profile_guid());
+ if (currentProfile == null)
+ return "";
+ return currentProfile.description;
+ });
+ self.getStabilizationProfileTitle = ko.computed(function () {
+ var currentProfile = self.getCurrentProfileByGuid(self.profiles().stabilizations(),Octolapse.Status.current_stabilization_profile_guid());
+ if (currentProfile == null)
+ return "";
+ return currentProfile.description;
+ });
+ self.getTriggerProfileTitle = ko.computed(function () {
+ var currentProfile = self.getCurrentProfileByGuid(self.profiles().triggers(),Octolapse.Status.current_trigger_profile_guid());
+ if (currentProfile == null)
+ return "";
+ return currentProfile.description;
+ });
+ self.getRenderingProfileTitle = ko.computed(function () {
+ var currentProfile = self.getCurrentProfileByGuid(self.profiles().renderings(),Octolapse.Status.current_rendering_profile_guid());
+ if (currentProfile == null)
+ return "";
+ return currentProfile.description;
+ });
+ self.getLoggingProfileTitle = ko.computed(function () {
+ var currentProfile = self.getCurrentProfileByGuid(self.profiles().logging_profiles(),Octolapse.Status.current_logging_profile_guid());
+ if (currentProfile == null)
+ return "";
+ return currentProfile.description;
+ });
+
};
/*
Status Tab viewmodels
@@ -852,6 +1023,7 @@ $(function () {
self.x_homed = ko.observable(false);
self.y_homed = ko.observable(false);
self.z_homed = ko.observable(false);
+ self.has_definite_position = ko.observable(false);
self.is_layer_change = ko.observable(false);
self.is_height_change = ko.observable(false);
self.is_in_position = ko.observable(false);
@@ -862,30 +1034,29 @@ $(function () {
self.layer = ko.observable(0);
self.height = ko.observable(0).extend({numeric: 2});
self.last_extruder_height = ko.observable(0).extend({numeric: 2});
- self.has_position_error = ko.observable(false);
- self.position_error = ko.observable(false);
self.is_metric = ko.observable(null);
self.is_initialized = ko.observable(false);
+ self.is_printer_primed = ko.observable(false);
self.update = function (state) {
- this.gcode(state.gcode);
- this.x_homed(state.x_homed);
- this.y_homed(state.y_homed);
- this.z_homed(state.z_homed);
- this.is_layer_change(state.is_layer_change);
- this.is_height_change(state.is_height_change);
- this.is_in_position(state.is_in_position);
- this.in_path_position(state.in_path_position);
- this.is_zhop(state.is_zhop);
- this.is_relative(state.is_relative);
- this.is_extruder_relative(state.is_extruder_relative);
- this.layer(state.layer);
- this.height(state.height);
- this.last_extruder_height(state.last_extruder_height);
- this.has_position_error(state.has_position_error);
- this.position_error(state.position_error);
- this.is_metric(state.is_metric);
- this.is_initialized(true);
+ self.gcode(state.gcode);
+ self.x_homed(state.x_homed);
+ self.y_homed(state.y_homed);
+ self.z_homed(state.z_homed);
+ self.has_definite_position(state.has_definite_position);
+ self.is_layer_change(state.is_layer_change);
+ self.is_height_change(state.is_height_change);
+ self.is_in_position(state.is_in_position);
+ self.in_path_position(state.in_path_position);
+ self.is_zhop(state.is_zhop);
+ self.is_relative(state.is_relative);
+ self.is_extruder_relative(state.is_extruder_relative);
+ self.layer(state.layer);
+ self.height(state.height);
+ self.last_extruder_height(state.last_extruder_height);
+ self.is_metric(state.is_metric);
+ self.is_printer_primed(state.is_printer_primed);
+ self.is_initialized(true);
};
self.getCheckedIconClass = function (value, trueClass, falseClass, nullClass) {
@@ -901,7 +1072,6 @@ $(function () {
});
};
-
self.getColor = function (value, trueColor, falseColor, nullColor) {
return ko.computed({
read: function () {
@@ -922,7 +1092,7 @@ $(function () {
|| self.is_relative() == null
|| self.is_extruder_relative() == null
|| !self.is_metric()
- || self.has_position_error())
+ )
return true;
return false;
},self);
@@ -946,7 +1116,14 @@ $(function () {
return "Not a zhop";
}, self);
- self.getis_in_printerStateText = ko.pureComputed(function () {
+ self.getHasDefinitePositionText = ko.pureComputed(function(){
+ if (self.has_definite_position())
+ return "Current position is definite";
+ else
+ return "Current position is not fully known.";
+ });
+
+ self.getIsInPositionStateText = ko.pureComputed(function () {
if (self.is_in_position())
return "In position";
else if (self.in_path_position())
@@ -955,7 +1132,7 @@ $(function () {
return "Not in position";
}, self);
- self.getis_metricStateText = ko.pureComputed(function () {
+ self.getIsMetricStateText = ko.pureComputed(function () {
if (self.is_metric())
return "Metric";
else if (self.is_metric() === null)
@@ -996,20 +1173,21 @@ $(function () {
else
return "Absolute";
}, self);
-
- self.getHasPositionErrorStateText = ko.pureComputed(function () {
- if (self.has_position_error())
- return "A position error was detected";
- else
- return "No current position errors";
- }, self);
- self.getis_layer_changeStateText = ko.pureComputed(function () {
+ self.getIsLayerChangeStateText = ko.pureComputed(function () {
if (self.is_layer_change())
return "Layer change detected";
else
return "Not changing layers";
}, self);
+
+ self.getIsPrinterPrimedStateTitle = ko.pureComputed(function(){
+ if(self.is_printer_primed())
+ return "Primed";
+ else
+ return "Not Primed";
+ }, self);
};
+
Octolapse.positionViewModel = function () {
var self = this;
self.f = ko.observable(0).extend({numeric: 2});
@@ -1031,21 +1209,10 @@ $(function () {
this.z_offset(state.z_offset);
this.e(state.e);
this.e_offset(state.e_offset);
- //self.plotPosition(state.x, state.y, state.z);
};
- /*
- self.plotPosition = function(x, y,z)
- {
- //console.log("Plotting Position")
- var canvas = document.getElementById("octolapse_position_canvas");
- canvas.width = 250;
- canvas.height = 200;
- var ctx = canvas.getContext("2d");
- ctx.clearRect(0, 0, canvas.width, canvas.height);
- ctx.fillRect(x + 2, x - 2,4, 4);
-
- }*/
+
};
+
Octolapse.extruderStateViewModel = function () {
var self = this;
// State variables
@@ -1090,7 +1257,7 @@ $(function () {
else if (self.is_retracted() && !self.is_partially_retracted())
return "fa-angle-double-up";
}
- return "fa-times-circle";
+ return "fa-times";
}, self);
self.getRetractionStateText = ko.pureComputed(function () {
@@ -1116,12 +1283,12 @@ $(function () {
self.getDeretractionIconClass = ko.pureComputed(function () {
if (self.is_retracting() && self.is_deretracting())
- return "fa-exclamation-circle";
+ return "fa-exclamation";
if (self.is_deretracting() && self.is_deretracting_start)
return "fa-level-down";
if (self.is_deretracting())
- return "fa-long-arrow-down";
- return "fa-times-circle";
+ return "fa-arrow-down";
+ return "fa-times";
}, self);
self.getDeretractionStateText = ko.pureComputed(function () {
@@ -1148,12 +1315,12 @@ $(function () {
return "exclamation-circle";
if (self.is_primed())
- return "fa-arrows-h";
+ return "fa-minus";
if (self.is_extruding_start())
return "fa-play-circle-o";
if (self.is_extruding())
return "fa-play";
- return "fa-times-circle";
+ return "fa-times";
}, self);
self.getExtrudingStateText = ko.pureComputed(function () {
if (self.is_extruding_start() && !self.is_extruding())
@@ -1167,6 +1334,7 @@ $(function () {
return "None";
}, self);
};
+
Octolapse.TriggersStateViewModel = function () {
var self = this;
@@ -1230,7 +1398,7 @@ $(function () {
self.is_waiting_on_extruder = ko.observable(state.is_waiting_on_extruder);
self.require_zhop = ko.observable(state.require_zhop);
self.trigger_count = ko.observable(state.trigger_count).extend({compactint: 1});
- self.is_homed = ko.observable(state.is_homed);
+ self.has_definite_position = ko.observable(state.has_definite_position);
self.is_in_position = ko.observable(state.is_in_position);
self.in_path_position = ko.observable(state.Isin_path_position);
self.update = function (state) {
@@ -1242,13 +1410,13 @@ $(function () {
self.is_waiting_on_extruder(state.is_waiting_on_extruder);
self.require_zhop(state.require_zhop);
self.trigger_count(state.trigger_count);
- self.is_homed(state.is_homed);
+ self.has_definite_position(state.has_definite_position);
self.is_in_position(state.is_in_position);
self.in_path_position(state.in_path_position);
};
self.triggerBackgroundIconClass = ko.pureComputed(function () {
- if (!self.is_homed())
- return "bg-not-homed";
+ if (!self.has_definite_position())
+ return "bg-unknown-position";
else if (!self.is_triggered() && Octolapse.PrinterStatus.isPaused())
return " bg-paused";
else
@@ -1257,8 +1425,8 @@ $(function () {
/* style related computed functions */
self.triggerStateText = ko.pureComputed(function () {
//console.log("Calculating trigger state text.");
- if (!self.is_homed())
- return "Idle until all axes are homed";
+ if (!self.has_definite_position())
+ return "Idle until a definite position is found";
else if (self.is_triggered())
return "Triggering a snapshot";
else if (Octolapse.PrinterStatus.isPaused())
@@ -1287,7 +1455,7 @@ $(function () {
}, self);
self.triggerIconClass = ko.pureComputed(function () {
- if (!self.is_homed())
+ if (!self.has_definite_position())
return "not-homed";
if (self.is_triggered())
return "trigger";
@@ -1306,6 +1474,7 @@ $(function () {
return "";
}, self);
};
+
Octolapse.gcodeTriggerStateViewModel = function (state) {
//console.log("creating gcode trigger state view model");
var self = this;
@@ -1318,7 +1487,7 @@ $(function () {
self.snapshot_command = ko.observable(state.snapshot_command);
self.require_zhop = ko.observable(state.require_zhop);
self.trigger_count = ko.observable(state.trigger_count).extend({compactint: 1});
- self.is_homed = ko.observable(state.is_homed);
+ self.has_definite_position = ko.observable(state.has_definite_position);
self.is_in_position = ko.observable(state.is_in_position);
self.in_path_position = ko.observable(state.Isin_path_position);
self.update = function (state) {
@@ -1331,74 +1500,61 @@ $(function () {
self.snapshot_command(state.snapshot_command);
self.require_zhop(state.require_zhop);
self.trigger_count(state.trigger_count);
- self.is_homed(state.is_homed);
+ self.has_definite_position(state.has_definite_position);
self.is_in_position(state.is_in_position);
self.in_path_position(state.in_path_position);
};
- self.triggerBackgroundIconClass = ko.pureComputed(function () {
- if (!self.is_homed())
- return "bg-not-homed";
- else if (!self.is_triggered() && Octolapse.PrinterStatus.isPaused())
- return " bg-paused";
- else
- return "";
+ self.getSnapshotCommands = ko.pureComputed(function () {
+ commands = ["@OCTOLAPSE TAKE-SNAPSHOT", "SNAP"];
+ if (self.snapshot_command().length > 0)
+ {
+ commands.push(self.snapshot_command());
+ }
+ return commands;
}, self);
/* style related computed functions */
self.triggerStateText = ko.pureComputed(function () {
- if (!self.is_homed())
- return "Idle until all axes are homed";
+ if (!self.has_definite_position())
+ return "Idle until the printer's position is known.";
else if (self.is_triggered())
- return "Triggering a snapshot";
+ return "Triggering a snapshot.";
else if (Octolapse.PrinterStatus.isPaused())
- return "Paused";
+ return "The trigger is paused.";
else if (self.is_waiting()) {
- // Create a list of things we are waiting on
- var waitText = "Waiting";
+ var waitText = "Waiting for";
var waitList = [];
if (self.is_waiting_on_zhop())
waitList.push("zhop");
if (self.is_waiting_on_extruder())
waitList.push("extruder");
if (!self.is_in_position() && !self.in_path_position())
+ {
waitList.push("position");
- if (waitList.length > 1) {
- waitText += " for " + waitList.join(" and ");
- waitText += " to trigger";
+ //console.log("Waiting on position.");
+ }
+ if (waitList.length > 0) {
+ if (waitList.length === 1) {
+ waitText += waitList[0];
+ }
+ else if (waitList.length > 1) {
+ var commaSeparated = waitList.slice(0, waitList.length - 2);
+ waitText += commaSeparated.join(", ");
+ if (waitList.length > 2)
+ waitText += ", ";
+ waitText += waitList[waitList.length-1];
+ }
+ waitText += " to trigger.";
}
- else if (waitList.length === 1)
- waitText += " for " + waitList[0] + " to trigger";
return waitText;
}
-
- else
- return "Looking for snapshot gcode";
-
- }, self);
- self.triggerIconClass = ko.pureComputed(function () {
- if (!self.is_homed())
- return "not-homed";
- if (self.is_triggered())
- return "trigger";
- if (Octolapse.PrinterStatus.isPaused())
- return "paused";
- if (self.is_waiting())
- return "wait";
- else
- return "fa-inverse";
- }, self);
-
- self.getInfoText = ko.pureComputed(function () {
- return "Triggering on gcode command: " + self.snapshot_command();
-
-
- }, self);
- self.getInfoIconText = ko.pureComputed(function () {
- return self.snapshot_command()
+ else{
+ return "Waiting for a snapshot command.";
+ }
}, self);
-
};
+
Octolapse.layerTriggerStateViewModel = function (state) {
//console.log("creating layer trigger state view model");
var self = this;
@@ -1414,51 +1570,49 @@ $(function () {
self.is_height_change = ko.observable(state.is_height_change);
self.is_height_change_wait = ko.observable(state.is_height_change_wait);
self.height_increment = ko.observable(state.height_increment).extend({numeric: 2});
+ self.has_definite_position = ko.observable(state.has_definite_position);
+ self.is_in_position = ko.observable(state.is_in_position);
+ self.in_path_position = ko.observable(state.in_path_position);
+
self.require_zhop = ko.observable(state.require_zhop);
self.trigger_count = ko.observable(state.trigger_count).extend({compactint: 1});
- self.is_homed = ko.observable(state.is_homed);
self.layer = ko.observable(state.layer);
- self.is_in_position = ko.observable(state.is_in_position);
- self.in_path_position = ko.observable(state.in_path_position);
+
self.update = function (state) {
self.type(state.type);
self.name(state.name);
+ // Config Info
+ self.require_zhop(state.require_zhop);
+ self.height_increment(state.height_increment);
+ // Layer and current increment
+ self.layer(state.layer);
+ self.current_increment(state.current_increment);
+ self.trigger_count(state.trigger_count);
+ // Triggering/Waiting Status
self.is_triggered(state.is_triggered);
self.is_waiting(state.is_waiting);
- self.is_waiting_on_zhop(state.is_waiting_on_zhop);
- self.is_waiting_on_extruder(state.is_waiting_on_extruder);
- self.current_increment(state.current_increment);
self.is_layer_change(state.is_layer_change);
self.is_layer_change_wait(state.is_layer_change_wait);
self.is_height_change(state.is_height_change);
self.is_height_change_wait(state.is_height_change_wait);
- self.height_increment(state.height_increment);
- self.require_zhop(state.require_zhop);
- self.trigger_count(state.trigger_count);
- self.is_homed(state.is_homed);
- self.layer(state.layer);
+ self.is_waiting_on_zhop(state.is_waiting_on_zhop);
+ self.is_waiting_on_extruder(state.is_waiting_on_extruder);
+ self.has_definite_position(state.has_definite_position);
self.is_in_position(state.is_in_position);
self.in_path_position(state.in_path_position);
+ // Layer/Height change Info
};
- self.triggerBackgroundIconClass = ko.pureComputed(function () {
- if (!self.is_homed())
- return "bg-not-homed";
- else if (!self.is_triggered() && Octolapse.PrinterStatus.isPaused())
- return " bg-paused";
- }, self);
/* style related computed functions */
self.triggerStateText = ko.pureComputed(function () {
- if (!self.is_homed())
- return "Idle until all axes are homed";
+ if (!self.has_definite_position())
+ return "Idle until the printer's position is known.";
else if (self.is_triggered())
- return "Triggering a snapshot";
+ return "Triggering a snapshot.";
else if (Octolapse.PrinterStatus.isPaused())
- return "Paused";
+ return "The trigger is paused.";
else if (self.is_waiting()) {
- // Create a list of things we are waiting on
- //console.log("Generating wait state text for LayerTrigger");
- var waitText = "Waiting";
+ var waitText = "Waiting for";
var waitList = [];
if (self.is_waiting_on_zhop())
waitList.push("zhop");
@@ -1469,59 +1623,55 @@ $(function () {
waitList.push("position");
//console.log("Waiting on position.");
}
- if (waitList.length > 1) {
- waitText += " for " + waitList.join(" and ");
- waitText += " to trigger";
+ if (waitList.length > 0) {
+ if (waitList.length === 1) {
+ waitText += waitList[0];
+ }
+ else if (waitList.length > 1) {
+ var commaSeparated = waitList.slice(0, waitList.length - 2);
+ waitText += commaSeparated.join(", ");
+ if (waitList.length > 2)
+ waitText += ", ";
+ waitText += waitList[waitList.length-1];
+ }
+ waitText += " to trigger.";
}
-
- else if (waitList.length === 1)
- waitText += " for " + waitList[0] + " to trigger";
return waitText;
}
- else if (self.height_increment() > 0) {
- var heightToTrigger = self.height_increment() * self.current_increment();
- return "Triggering when height reaches " + heightToTrigger.toFixed(1) + " mm";
+ else if (self.height_increment() != null && self.height_increment() > 0) {
+ var heightToTrigger = self.height_increment() * (self.current_increment() + 1);
+ return "Triggering when height reaches " + Octolapse.roundToIncrement(heightToTrigger,0.01).toString() + "mm.";
}
else
- return "Triggering on next layer change";
+ return "Triggering on next layer change.";
}, self);
- self.triggerIconClass = ko.pureComputed(function () {
- if (!self.is_homed())
- return "not-homed";
- if (self.is_triggered())
- return "trigger";
- if (Octolapse.PrinterStatus.isPaused())
- return "paused";
- if (self.is_waiting())
- return " wait";
- else
- return " fa-inverse";
- }, self);
-
- self.getInfoText = ko.pureComputed(function () {
- var val = 0;
- if (self.height_increment() > 0)
-
- val = self.height_increment() + " mm";
+ self.triggerTypeText = ko.pureComputed(function(){
+ if (self.height_increment() === 0) {
+ return "Layer";
+ }
+ return "Height";
+ });
- else
- val = "layer";
- return "Triggering every " + Octolapse.ToCompactInt(val);
+ self.currentTriggerIncrement = ko.pureComputed(function(){
+ if (self.height_increment() === 0) {
+ return self.layer;
+ }
+ return Octolapse.roundToIncrement(self.current_increment(),0.01).toString() + "mm";
+ });
+ self.triggerOnText = ko.pureComputed(function () {
+ if (self.height_increment !== null || self.height_increment() === 0)
+ {
+ return "Every Layer";
+ }
- }, self);
- self.getInfoIconText = ko.pureComputed(function () {
- var val = 0;
- if (self.height_increment() > 0)
- val = self.current_increment();
- else
- val = self.layer();
- return Octolapse.ToCompactInt(val);
+ return "Every " + Octolapse.roundToIncrement(self.height_increment(),0.01).toString() + "mm";
}, self);
};
+
Octolapse.timerTriggerStateViewModel = function (state) {
//console.log("creating timer trigger state view model");
var self = this;
@@ -1537,7 +1687,7 @@ $(function () {
self.pause_time = ko.observable(state.pause_time).extend({time: null});
self.require_zhop = ko.observable(state.require_zhop);
self.trigger_count = ko.observable(state.trigger_count);
- self.is_homed = ko.observable(state.is_homed);
+ self.has_definite_position = ko.observable(state.has_definite_position);
self.is_in_position = ko.observable(state.is_in_position);
self.in_path_position = ko.observable(state.Isin_path_position);
self.update = function (state) {
@@ -1553,67 +1703,59 @@ $(function () {
self.pause_time(state.pause_time);
self.interval_seconds(state.interval_seconds);
self.trigger_count(state.trigger_count);
- self.is_homed(state.is_homed);
+ self.has_definite_position(state.has_definite_position);
self.is_in_position(state.is_in_position);
self.in_path_position(state.in_path_position);
};
-
/* style related computed functions */
self.triggerStateText = ko.pureComputed(function () {
- if (!self.is_homed())
- return "Idle until all axes are homed";
+ if (!self.has_definite_position())
+ return "Idle until the printer's position is known.";
else if (self.is_triggered())
- return "Triggering a snapshot";
+ return "Triggering a snapshot.";
else if (Octolapse.PrinterStatus.isPaused())
- return "Paused";
+ return "The trigger is paused.";
else if (self.is_waiting()) {
- // Create a list of things we are waiting on
- var waitText = "Waiting";
+ var waitText = "Waiting for";
var waitList = [];
if (self.is_waiting_on_zhop())
waitList.push("zhop");
if (self.is_waiting_on_extruder())
waitList.push("extruder");
if (!self.is_in_position() && !self.in_path_position())
+ {
waitList.push("position");
- if (waitList.length > 1) {
- waitText += " for " + waitList.join(" and ");
- waitText += " to trigger";
+ //console.log("Waiting on position.");
+ }
+ if (waitList.length > 0) {
+ if (waitList.length === 1) {
+ waitText += waitList[0];
+ }
+ else if (waitList.length > 1) {
+ var commaSeparated = waitList.slice(0, waitList.length - 2);
+ waitText += commaSeparated.join(", ");
+ if (waitList.length > 2)
+ waitText += ", ";
+ waitText += waitList[waitList.length-1];
+ }
+ waitText += " to trigger.";
}
- else if (waitList.length === 1)
- waitText += " for " + waitList[0] + " to trigger";
return waitText;
}
-
else
- return "Triggering in " + self.seconds_to_trigger() + " seconds";
+ return "Triggering in " + self.secondsToTrigger() + ".";
}, self);
- self.triggerBackgroundIconClass = ko.pureComputed(function () {
- if (!self.is_homed())
- return "bg-not-homed";
- else if (!self.is_triggered() && Octolapse.PrinterStatus.isPaused())
- return " bg-paused";
- }, self);
- self.triggerIconClass = ko.pureComputed(function () {
- if (!self.is_homed())
- return "not-homed";
- if (self.is_triggered())
- return "trigger";
- if (Octolapse.PrinterStatus.isPaused())
- return "paused";
- if (self.is_waiting())
- return " wait";
- else
- return " fa-inverse";
- }, self);
- self.getInfoText = ko.pureComputed(function () {
- return "Triggering every " + Octolapse.ToTimer(self.interval_seconds());
+
+ self.secondsInterval = ko.pureComputed(function () {
+ return Octolapse.ToTimer(self.interval_seconds());
}, self);
- self.getInfoIconText = ko.pureComputed(function () {
- return "Triggering every " + Octolapse.ToTimer(self.interval_seconds());
+
+ self.secondsToTrigger = ko.pureComputed(function () {
+ return Octolapse.ToTimer(self.seconds_to_trigger());
}, self);
+
};
OCTOPRINT_VIEWMODELS.push([
diff --git a/octoprint_octolapse/static/js/octolapse.status.snapshotplan.js b/octoprint_octolapse/static/js/octolapse.status.snapshotplan.js
index ffcf0a2b..830c5d1a 100644
--- a/octoprint_octolapse/static/js/octolapse.status.snapshotplan.js
+++ b/octoprint_octolapse/static/js/octolapse.status.snapshotplan.js
@@ -1,7 +1,7 @@
/*
##################################################################################
# Octolapse - A plugin for OctoPrint used for making stabilized timelapse videos.
-# Copyright (C) 2019 Brad Hochgesang
+# Copyright (C) 2023 Brad Hochgesang
##################################################################################
# This program is free software: you can redistribute it and/or modify
# it under the terms of the GNU Affero General Public License as published
@@ -32,12 +32,21 @@ Octolapse.snapshotPlanStateViewModel = function() {
self.plan_count = ko.observable(null);
self.lines_remaining = ko.observable(null);
self.lines_total = ko.observable(null);
- self.x_initial = ko.observable(null).extend({numeric: 2});
- self.y_initial = ko.observable(null).extend({numeric: 2});
- self.z_initial = ko.observable(null).extend({numeric: 2});
- self.x_return = ko.observable(null).extend({numeric: 2});
- self.y_return = ko.observable(null).extend({numeric: 2});
- self.z_return = ko.observable(null).extend({numeric: 2});
+ self.x_initial = ko.observable(null);
+ self.y_initial = ko.observable(null);
+ self.z_initial = ko.observable(null);
+ self.x_return = ko.observable(null);
+ self.y_return = ko.observable(null);
+ self.z_return = ko.observable(null);
+
+ self.format_coordinates = function(val)
+ {
+ if (val) return val.toFixed(2);
+ return "";
+ };
+
+ self.multi_extruder = ko.observable(false);
+ self.current_tool = ko.observable(0);
self.progress_percent = ko.observable(null).extend({numeric: 2});
self.snapshot_positions = ko.observableArray([]);
self.is_animating_plans = ko.observable(false);
@@ -49,6 +58,15 @@ Octolapse.snapshotPlanStateViewModel = function() {
self.axes = null;
self.is_preview = false;
self.is_confirmation_popup = ko.observable(false);
+ self.autoclose = ko.observable(false);
+ self.autoclose_seconds = ko.observable(0);
+ self.quality_issues = ko.observableArray();
+ self.missed_snapshots = ko.observable(0);
+
+ setInterval(function() {
+ var newTimer = self.autoclose_seconds() -1;
+ self.autoclose_seconds(newTimer <= 0 ? 1 : newTimer);
+ }, 1000);
self.update = function (state) {
if (state.snapshot_plans != null)
@@ -64,6 +82,24 @@ Octolapse.snapshotPlanStateViewModel = function() {
}
self.total_saved_travel_percent(percent_saved);
+ if(typeof state.quality_issues !== 'undefined')
+ {
+ self.quality_issues(state.quality_issues);
+ }
+
+ if(typeof state.missed_snapshots !== 'undefined')
+ {
+ self.missed_snapshots(state.missed_snapshots);
+ }
+
+ if (typeof state.autoclose !== 'undefined') {
+ //console.log("Setting snapshot plan preview autoclose");
+ self.autoclose(state.autoclose);
+ self.autoclose_seconds(state.autoclose_seconds);
+ }
+ else {
+ console.error("Autoclose property not set!");
+ }
}
if (state.current_plan_index != null)
{
@@ -104,25 +140,36 @@ Octolapse.snapshotPlanStateViewModel = function() {
self.lines_remaining(lines_remaining);
var previous_line = 0;
if (self.current_plan_index() - 1 > 0)
- previous_plan = self.snapshot_plans()[self.current_plan_index() - 1]
+ previous_plan = self.snapshot_plans()[self.current_plan_index() - 1];
if (previous_plan != null)
previous_line = previous_plan.file_gcode_number;
var lines_total = current_plan.file_gcode_number - previous_line;
self.lines_total(lines_total);
self.progress_percent((1-(lines_remaining / lines_total)) * 100);
+ self.multi_extruder(showing_plan.initial_position.extruders.length > 1);
+ self.current_tool(showing_plan.initial_position.current_tool);
+
self.x_initial(showing_plan.initial_position.x);
self.y_initial(showing_plan.initial_position.y);
self.z_initial(showing_plan.initial_position.z);
- self.x_return(showing_plan.return_position.x);
- self.y_return(showing_plan.return_position.y);
- self.z_return(showing_plan.return_position.z);
+ if (showing_plan.return_position) {
+ self.x_return(showing_plan.return_position.x);
+ self.y_return(showing_plan.return_position.y);
+ self.z_return(showing_plan.return_position.z);
+ }
+ else
+ {
+ self.x_return(showing_plan.initial_position.x);
+ self.y_return(showing_plan.initial_position.y);
+ self.z_return(showing_plan.initial_position.z);
+ }
self.travel_distance(showing_plan.total_travel_distance);
self.saved_travel_distance(showing_plan.total_saved_travel_distance);
var x_current = showing_plan.initial_position.x;
var y_current = showing_plan.initial_position.y;
var z_current = showing_plan.initial_position.z;
- self.snapshot_positions([]);
+ var snapshot_positions = [];
// Create snapshot positions from steps
for (var stepIndex = 0; stepIndex < showing_plan.steps.length; stepIndex++)
{
@@ -138,9 +185,10 @@ Octolapse.snapshotPlanStateViewModel = function() {
}
else if(current_step.action == "snapshot")
{
- self.snapshot_positions.push({x: x_current, y: y_current, z: z_current});
+ snapshot_positions.push({x: x_current, y: y_current, z: z_current});
}
}
+ self.snapshot_positions(snapshot_positions);
// Update Canvass
self.updateCanvas();
};
@@ -149,11 +197,18 @@ Octolapse.snapshotPlanStateViewModel = function() {
{
self.is_animating_plans(false);
self.view_current_plan(false);
+ if (self.snapshot_plans().length < 1)
+ return;
+
var index = self.plan_index()+1;
if (index < self.snapshot_plans().length)
{
self.plan_index(index);
}
+ else
+ {
+ self.plan_index(0);
+ }
self.update_current_plan();
return false;
};
@@ -162,11 +217,17 @@ Octolapse.snapshotPlanStateViewModel = function() {
{
self.is_animating_plans(false);
self.view_current_plan(false);
+ if (self.snapshot_plans().length < 1)
+ return false;
var index = self.plan_index()-1;
- if (index > -1 && self.snapshot_plans().length > 0)
+ if (index > -1)
{
self.plan_index(index);
}
+ else
+ {
+ self.plan_index(self.snapshot_plans().length - 1);
+ }
self.update_current_plan();
return false;
};
@@ -432,7 +493,7 @@ Octolapse.snapshotPlanStateViewModel = function() {
"Y",
self.canvas_border_size[0] * 0.5 - text_width.width/2 - 1,
self.canvas_printer_size[1] - self.axis_line_length + self.canvas_border_size[1] * 1.5 - 2
- )
+ );
// *** draw the X arrow
// draw the horizontal line
@@ -476,7 +537,7 @@ Octolapse.snapshotPlanStateViewModel = function() {
"X",
self.canvas_border_size[0] * 0.5 + self.axis_line_length,
self.canvas_printer_size[1] + self.canvas_border_size[1] * 1.5 + 4.5
- )
+ );
};
@@ -590,20 +651,28 @@ Octolapse.snapshotPlanStateViewModel = function() {
return (max - min) - coord;
};
- self.normalize_coordinate = function(coord, min)
+ self.normalize_coordinate = function(coord, min, max)
{
- return coord - min;
+ if (self.printer_volume.origin_type == 'center')
+ {
+ return coord + (max - min) / 2.0;
+ }
+ else
+ {
+ return coord - min;
+ }
+
};
self.to_canvas_x = function(x)
{
- x = self.normalize_coordinate(x, self.printer_volume.min_x);
+ x = self.normalize_coordinate(x, self.printer_volume.min_x, self.printer_volume.max_x);
return x *self.x_canvas_scale + self.canvas_border_size[0];
};
self.to_canvas_y = function(y)
{
- y = self.normalize_coordinate(y, self.printer_volume.min_y);
+ y = self.normalize_coordinate(y, self.printer_volume.min_y, self.printer_volume.max_y);
// Y coordinates are flipped on the camera when compared to the standard 3d printer
// coordinates, so invert the coordinate
y = self.invert_coordinate(y, self.printer_volume.min_y, self.printer_volume.max_y);
@@ -613,7 +682,8 @@ Octolapse.snapshotPlanStateViewModel = function() {
self.to_canvas_z = function(z)
{
- z = self.normalize_coordinate(z, self.printer_volume.min_z);
+ // This isn't right, z coordinates always start at 0!
+ z = self.normalize_coordinate(z, 0, 0);
return z *self.z_canvas_scale + self.canvas_border_size[2];
};
diff --git a/octoprint_octolapse/static/js/octolapse.status.snapshotplan_preview.js b/octoprint_octolapse/static/js/octolapse.status.snapshotplan_preview.js
index 2585eeff..0b5439e9 100644
--- a/octoprint_octolapse/static/js/octolapse.status.snapshotplan_preview.js
+++ b/octoprint_octolapse/static/js/octolapse.status.snapshotplan_preview.js
@@ -1,7 +1,7 @@
/*
##################################################################################
# Octolapse - A plugin for OctoPrint used for making stabilized timelapse videos.
-# Copyright (C) 2019 Brad Hochgesang
+# Copyright (C) 2023 Brad Hochgesang
##################################################################################
# This program is free software: you can redistribute it and/or modify
# it under the terms of the GNU Affero General Public License as published
@@ -107,6 +107,6 @@ $(function() {
self.acceptPreview = function() {
Octolapse.Globals.acceptSnapshotPlanPreview();
};
-
+
};
});
diff --git a/octoprint_octolapse/static/js/showdown.min.js b/octoprint_octolapse/static/js/showdown.min.js
index b9208f8e..ee264278 100644
--- a/octoprint_octolapse/static/js/showdown.min.js
+++ b/octoprint_octolapse/static/js/showdown.min.js
@@ -1,27 +1,5143 @@
-/*!
-showdown v 1.9.0 - 10-11-2018
+;/*! showdown v 1.9.1 - 02-11-2019 */
+(function(){
+/**
+ * Created by Tivie on 13-07-2015.
+ */
-MIT License
+function getDefaultOpts (simple) {
+ 'use strict';
-Copyright (c) 2018 ShowdownJS
+ var defaultOptions = {
+ omitExtraWLInCodeBlocks: {
+ defaultValue: false,
+ describe: 'Omit the default extra whiteline added to code blocks',
+ type: 'boolean'
+ },
+ noHeaderId: {
+ defaultValue: false,
+ describe: 'Turn on/off generated header id',
+ type: 'boolean'
+ },
+ prefixHeaderId: {
+ defaultValue: false,
+ describe: 'Add a prefix to the generated header ids. Passing a string will prefix that string to the header id. Setting to true will add a generic \'section-\' prefix',
+ type: 'string'
+ },
+ rawPrefixHeaderId: {
+ defaultValue: false,
+ describe: 'Setting this option to true will prevent showdown from modifying the prefix. This might result in malformed IDs (if, for instance, the " char is used in the prefix)',
+ type: 'boolean'
+ },
+ ghCompatibleHeaderId: {
+ defaultValue: false,
+ describe: 'Generate header ids compatible with github style (spaces are replaced with dashes, a bunch of non alphanumeric chars are removed)',
+ type: 'boolean'
+ },
+ rawHeaderId: {
+ defaultValue: false,
+ describe: 'Remove only spaces, \' and " from generated header ids (including prefixes), replacing them with dashes (-). WARNING: This might result in malformed ids',
+ type: 'boolean'
+ },
+ headerLevelStart: {
+ defaultValue: false,
+ describe: 'The header blocks level start',
+ type: 'integer'
+ },
+ parseImgDimensions: {
+ defaultValue: false,
+ describe: 'Turn on/off image dimension parsing',
+ type: 'boolean'
+ },
+ simplifiedAutoLink: {
+ defaultValue: false,
+ describe: 'Turn on/off GFM autolink style',
+ type: 'boolean'
+ },
+ excludeTrailingPunctuationFromURLs: {
+ defaultValue: false,
+ describe: 'Excludes trailing punctuation from links generated with autoLinking',
+ type: 'boolean'
+ },
+ literalMidWordUnderscores: {
+ defaultValue: false,
+ describe: 'Parse midword underscores as literal underscores',
+ type: 'boolean'
+ },
+ literalMidWordAsterisks: {
+ defaultValue: false,
+ describe: 'Parse midword asterisks as literal asterisks',
+ type: 'boolean'
+ },
+ strikethrough: {
+ defaultValue: false,
+ describe: 'Turn on/off strikethrough support',
+ type: 'boolean'
+ },
+ tables: {
+ defaultValue: false,
+ describe: 'Turn on/off tables support',
+ type: 'boolean'
+ },
+ tablesHeaderId: {
+ defaultValue: false,
+ describe: 'Add an id to table headers',
+ type: 'boolean'
+ },
+ ghCodeBlocks: {
+ defaultValue: true,
+ describe: 'Turn on/off GFM fenced code blocks support',
+ type: 'boolean'
+ },
+ tasklists: {
+ defaultValue: false,
+ describe: 'Turn on/off GFM tasklist support',
+ type: 'boolean'
+ },
+ smoothLivePreview: {
+ defaultValue: false,
+ describe: 'Prevents weird effects in live previews due to incomplete input',
+ type: 'boolean'
+ },
+ smartIndentationFix: {
+ defaultValue: false,
+ description: 'Tries to smartly fix indentation in es6 strings',
+ type: 'boolean'
+ },
+ disableForced4SpacesIndentedSublists: {
+ defaultValue: false,
+ description: 'Disables the requirement of indenting nested sublists by 4 spaces',
+ type: 'boolean'
+ },
+ simpleLineBreaks: {
+ defaultValue: false,
+ description: 'Parses simple line breaks as
(GFM Style)',
+ type: 'boolean'
+ },
+ requireSpaceBeforeHeadingText: {
+ defaultValue: false,
+ description: 'Makes adding a space between `#` and the header text mandatory (GFM Style)',
+ type: 'boolean'
+ },
+ ghMentions: {
+ defaultValue: false,
+ description: 'Enables github @mentions',
+ type: 'boolean'
+ },
+ ghMentionsLink: {
+ defaultValue: 'https://github.com/{u}',
+ description: 'Changes the link generated by @mentions. Only applies if ghMentions option is enabled.',
+ type: 'string'
+ },
+ encodeEmails: {
+ defaultValue: true,
+ description: 'Encode e-mail addresses through the use of Character Entities, transforming ASCII e-mail addresses into its equivalent decimal entities',
+ type: 'boolean'
+ },
+ openLinksInNewWindow: {
+ defaultValue: false,
+ description: 'Open all links in new windows',
+ type: 'boolean'
+ },
+ backslashEscapesHTMLTags: {
+ defaultValue: false,
+ description: 'Support for HTML Tag escaping. ex: \foo\',
+ type: 'boolean'
+ },
+ emoji: {
+ defaultValue: false,
+ description: 'Enable emoji support. Ex: `this is a :smile: emoji`',
+ type: 'boolean'
+ },
+ underline: {
+ defaultValue: false,
+ description: 'Enable support for underline. Syntax is double or triple underscores: `__underline word__`. With this option enabled, underscores no longer parses into `` and ``',
+ type: 'boolean'
+ },
+ completeHTMLDocument: {
+ defaultValue: false,
+ description: 'Outputs a complete html document, including ``, `` and `` tags',
+ type: 'boolean'
+ },
+ metadata: {
+ defaultValue: false,
+ description: 'Enable support for document metadata (defined at the top of the document between `«««` and `»»»` or between `---` and `---`).',
+ type: 'boolean'
+ },
+ splitAdjacentBlockquotes: {
+ defaultValue: false,
+ description: 'Split adjacent blockquote blocks',
+ type: 'boolean'
+ }
+ };
+ if (simple === false) {
+ return JSON.parse(JSON.stringify(defaultOptions));
+ }
+ var ret = {};
+ for (var opt in defaultOptions) {
+ if (defaultOptions.hasOwnProperty(opt)) {
+ ret[opt] = defaultOptions[opt].defaultValue;
+ }
+ }
+ return ret;
+}
-Permission is hereby granted, free of charge, to any person obtaining a copy
-of this software and associated documentation files (the "Software"), to deal
-in the Software without restriction, including without limitation the rights
-to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
-copies of the Software, and to permit persons to whom the Software is
-furnished to do so, subject to the following conditions:
+function allOptionsOn () {
+ 'use strict';
+ var options = getDefaultOpts(true),
+ ret = {};
+ for (var opt in options) {
+ if (options.hasOwnProperty(opt)) {
+ ret[opt] = true;
+ }
+ }
+ return ret;
+}
-The above copyright notice and this permission notice shall be included in all
-copies or substantial portions of the Software.
+/**
+ * Created by Tivie on 06-01-2015.
+ */
-THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
-IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
-FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
-AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
-LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
-OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
-SOFTWARE.*/
+// Private properties
+var showdown = {},
+ parsers = {},
+ extensions = {},
+ globalOptions = getDefaultOpts(true),
+ setFlavor = 'vanilla',
+ flavor = {
+ github: {
+ omitExtraWLInCodeBlocks: true,
+ simplifiedAutoLink: true,
+ excludeTrailingPunctuationFromURLs: true,
+ literalMidWordUnderscores: true,
+ strikethrough: true,
+ tables: true,
+ tablesHeaderId: true,
+ ghCodeBlocks: true,
+ tasklists: true,
+ disableForced4SpacesIndentedSublists: true,
+ simpleLineBreaks: true,
+ requireSpaceBeforeHeadingText: true,
+ ghCompatibleHeaderId: true,
+ ghMentions: true,
+ backslashEscapesHTMLTags: true,
+ emoji: true,
+ splitAdjacentBlockquotes: true
+ },
+ original: {
+ noHeaderId: true,
+ ghCodeBlocks: false
+ },
+ ghost: {
+ omitExtraWLInCodeBlocks: true,
+ parseImgDimensions: true,
+ simplifiedAutoLink: true,
+ excludeTrailingPunctuationFromURLs: true,
+ literalMidWordUnderscores: true,
+ strikethrough: true,
+ tables: true,
+ tablesHeaderId: true,
+ ghCodeBlocks: true,
+ tasklists: true,
+ smoothLivePreview: true,
+ simpleLineBreaks: true,
+ requireSpaceBeforeHeadingText: true,
+ ghMentions: false,
+ encodeEmails: true
+ },
+ vanilla: getDefaultOpts(true),
+ allOn: allOptionsOn()
+ };
-(function(){function e(e){"use strict";var r={omitExtraWLInCodeBlocks:{defaultValue:!1,describe:"Omit the default extra whiteline added to code blocks",type:"boolean"},noHeaderId:{defaultValue:!1,describe:"Turn on/off generated header id",type:"boolean"},prefixHeaderId:{defaultValue:!1,describe:"Add a prefix to the generated header ids. Passing a string will prefix that string to the header id. Setting to true will add a generic 'section-' prefix",type:"string"},rawPrefixHeaderId:{defaultValue:!1,describe:'Setting this option to true will prevent showdown from modifying the prefix. This might result in malformed IDs (if, for instance, the " char is used in the prefix)',type:"boolean"},ghCompatibleHeaderId:{defaultValue:!1,describe:"Generate header ids compatible with github style (spaces are replaced with dashes, a bunch of non alphanumeric chars are removed)",type:"boolean"},rawHeaderId:{defaultValue:!1,describe:"Remove only spaces, ' and \" from generated header ids (including prefixes), replacing them with dashes (-). WARNING: This might result in malformed ids",type:"boolean"},headerLevelStart:{defaultValue:!1,describe:"The header blocks level start",type:"integer"},parseImgDimensions:{defaultValue:!1,describe:"Turn on/off image dimension parsing",type:"boolean"},simplifiedAutoLink:{defaultValue:!1,describe:"Turn on/off GFM autolink style",type:"boolean"},excludeTrailingPunctuationFromURLs:{defaultValue:!1,describe:"Excludes trailing punctuation from links generated with autoLinking",type:"boolean"},literalMidWordUnderscores:{defaultValue:!1,describe:"Parse midword underscores as literal underscores",type:"boolean"},literalMidWordAsterisks:{defaultValue:!1,describe:"Parse midword asterisks as literal asterisks",type:"boolean"},strikethrough:{defaultValue:!1,describe:"Turn on/off strikethrough support",type:"boolean"},tables:{defaultValue:!1,describe:"Turn on/off tables support",type:"boolean"},tablesHeaderId:{defaultValue:!1,describe:"Add an id to table headers",type:"boolean"},ghCodeBlocks:{defaultValue:!0,describe:"Turn on/off GFM fenced code blocks support",type:"boolean"},tasklists:{defaultValue:!1,describe:"Turn on/off GFM tasklist support",type:"boolean"},smoothLivePreview:{defaultValue:!1,describe:"Prevents weird effects in live previews due to incomplete input",type:"boolean"},smartIndentationFix:{defaultValue:!1,description:"Tries to smartly fix indentation in es6 strings",type:"boolean"},disableForced4SpacesIndentedSublists:{defaultValue:!1,description:"Disables the requirement of indenting nested sublists by 4 spaces",type:"boolean"},simpleLineBreaks:{defaultValue:!1,description:"Parses simple line breaks as
(GFM Style)",type:"boolean"},requireSpaceBeforeHeadingText:{defaultValue:!1,description:"Makes adding a space between `#` and the header text mandatory (GFM Style)",type:"boolean"},ghMentions:{defaultValue:!1,description:"Enables github @mentions",type:"boolean"},ghMentionsLink:{defaultValue:"https://github.com/{u}",description:"Changes the link generated by @mentions. Only applies if ghMentions option is enabled.",type:"string"},encodeEmails:{defaultValue:!0,description:"Encode e-mail addresses through the use of Character Entities, transforming ASCII e-mail addresses into its equivalent decimal entities",type:"boolean"},openLinksInNewWindow:{defaultValue:!1,description:"Open all links in new windows",type:"boolean"},backslashEscapesHTMLTags:{defaultValue:!1,description:"Support for HTML Tag escaping. ex: foo",type:"boolean"},emoji:{defaultValue:!1,description:"Enable emoji support. Ex: `this is a :smile: emoji`",type:"boolean"},underline:{defaultValue:!1,description:"Enable support for underline. Syntax is double or triple underscores: `__underline word__`. With this option enabled, underscores no longer parses into `` and ``",type:"boolean"},completeHTMLDocument:{defaultValue:!1,description:"Outputs a complete html document, including ``, `` and `` tags",type:"boolean"},metadata:{defaultValue:!1,description:"Enable support for document metadata (defined at the top of the document between `«««` and `»»»` or between `---` and `---`).",type:"boolean"},splitAdjacentBlockquotes:{defaultValue:!1,description:"Split adjacent blockquote blocks",type:"boolean"}};if(!1===e)return JSON.parse(JSON.stringify(r));var t={};for(var a in r)r.hasOwnProperty(a)&&(t[a]=r[a].defaultValue);return t}function r(e,r){"use strict";var t=r?"Error in "+r+" extension->":"Error in unnamed extension",n={valid:!0,error:""};a.helper.isArray(e)||(e=[e]);for(var s=0;s![]() ',showdown:"S"},a.Converter=function(e){"use strict";function t(e,t){if(t=t||null,a.helper.isString(e)){if(e=a.helper.stdExtName(e),t=e,a.extensions[e])return console.warn("DEPRECATION WARNING: "+e+" is an old extension that uses a deprecated loading method.Please inform the developer that the extension should be updated!"),void function(e,t){"function"==typeof e&&(e=e(new a.Converter));a.helper.isArray(e)||(e=[e]);var n=r(e,t);if(!n.valid)throw Error(n.error);for(var s=0;s
',showdown:"S"},a.Converter=function(e){"use strict";function t(e,t){if(t=t||null,a.helper.isString(e)){if(e=a.helper.stdExtName(e),t=e,a.extensions[e])return console.warn("DEPRECATION WARNING: "+e+" is an old extension that uses a deprecated loading method.Please inform the developer that the extension should be updated!"),void function(e,t){"function"==typeof e&&(e=e(new a.Converter));a.helper.isArray(e)||(e=[e]);var n=r(e,t);if(!n.valid)throw Error(n.error);for(var s=0;s[^\r]+?<\/pre>)/gm,function(e,r){var t=r;return t=t.replace(/^ /gm,"¨0"),t=t.replace(/¨0/g,"")}),a.subParser("hashBlock")("","gim"),e=t.converter._dispatch("hashPreCodeTags.after",e,r,t)}),a.subParser("headers",function(e,r,t){"use strict";function n(e){var n,s;if(r.customizedHeaderId){var o=e.match(/\{([^{]+?)}\s*$/);o&&o[1]&&(e=o[1])}return n=e,s=a.helper.isString(r.prefixHeaderId)?r.prefixHeaderId:!0===r.prefixHeaderId?"section-":"",r.rawPrefixHeaderId||(n=s+n),n=r.ghCompatibleHeaderId?n.replace(/ /g,"-").replace(/&/g,"").replace(/¨T/g,"").replace(/¨D/g,"").replace(/[&+$,\/:;=?@"#{}|^¨~\[\]`\\*)(%.!'<>]/g,"").toLowerCase():r.rawHeaderId?n.replace(/ /g,"-").replace(/&/g,"&").replace(/¨T/g,"¨").replace(/¨D/g,"$").replace(/["']/g,"-").toLowerCase():n.replace(/[^\w]/g,"").toLowerCase(),r.rawPrefixHeaderId&&(n=s+n),t.hashLinkCounts[n]?n=n+"-"+t.hashLinkCounts[n]++:t.hashLinkCounts[n]=1,n}e=t.converter._dispatch("headers.before",e,r,t);var s=isNaN(parseInt(r.headerLevelStart))?1:parseInt(r.headerLevelStart),o=r.smoothLivePreview?/^(.+)[ \t]*\n={2,}[ \t]*\n+/gm:/^(.+)[ \t]*\n=+[ \t]*\n+/gm,i=r.smoothLivePreview?/^(.+)[ \t]*\n-{2,}[ \t]*\n+/gm:/^(.+)[ \t]*\n-+[ \t]*\n+/gm;e=(e=e.replace(o,function(e,o){var i=a.subParser("spanGamut")(o,r,t),l=r.noHeaderId?"":' id="'+n(o)+'"',c="\n"+e+"\n
",r,t)}),e=t.converter._dispatch("blockQuotes.after",e,r,t)}),a.subParser("codeBlocks",function(e,r,t){"use strict";e=t.converter._dispatch("codeBlocks.before",e,r,t);return e=(e+="¨0").replace(/(?:\n\n|^)((?:(?:[ ]{4}|\t).*\n+)+)(\n*[ ]{0,3}[^ \t\n]|(?=¨0))/g,function(e,n,s){var o=n,i=s,l="\n";return o=a.subParser("outdent")(o,r,t),o=a.subParser("encodeCode")(o,r,t),o=a.subParser("detab")(o,r,t),o=o.replace(/^\n+/g,""),o=o.replace(/\n+$/g,""),r.omitExtraWLInCodeBlocks&&(l=""),o="
",a.subParser("hashBlock")(o,r,t)+i}),e=e.replace(/¨0/,""),e=t.converter._dispatch("codeBlocks.after",e,r,t)}),a.subParser("codeSpans",function(e,r,t){"use strict";return void 0===(e=t.converter._dispatch("codeSpans.before",e,r,t))&&(e=""),e=e.replace(/(^|[^\\])(`+)([^\r]*?[^`])\2(?!`)/gm,function(e,n,s,o){var i=o;return i=i.replace(/^([ \t]*)/g,""),i=i.replace(/[ \t]*$/g,""),i=a.subParser("encodeCode")(i,r,t),i=n+""+o+l+""+i+"",i=a.subParser("hashHTMLSpans")(i,r,t)}),e=t.converter._dispatch("codeSpans.after",e,r,t)}),a.subParser("completeHTMLDocument",function(e,r,t){"use strict";if(!r.completeHTMLDocument)return e;e=t.converter._dispatch("completeHTMLDocument.before",e,r,t);var a="html",n="\n",s="",o='\n',i="",l="";void 0!==t.metadata.parsed.doctype&&(n="\n","html"!==(a=t.metadata.parsed.doctype.toString().toLowerCase())&&"html5"!==a||(o=''));for(var c in t.metadata.parsed)if(t.metadata.parsed.hasOwnProperty(c))switch(c.toLowerCase()){case"doctype":break;case"title":s="
",o=a.subParser("hashBlock")(o,r,t),"\n\n¨G"+(t.ghCodeBlocks.push({text:e,codeblock:o})-1)+"G\n\n"}),e=e.replace(/¨0/,""),t.converter._dispatch("githubCodeBlocks.after",e,r,t)):e}),a.subParser("hashBlock",function(e,r,t){"use strict";return e=t.converter._dispatch("hashBlock.before",e,r,t),e=e.replace(/(^\n+|\n+$)/g,""),e="\n\n¨K"+(t.gHtmlBlocks.push(e)-1)+"K\n\n",e=t.converter._dispatch("hashBlock.after",e,r,t)}),a.subParser("hashCodeTags",function(e,r,t){"use strict";e=t.converter._dispatch("hashCodeTags.before",e,r,t);return e=a.helper.replaceRecursiveRegExp(e,function(e,n,s,o){var i=s+a.subParser("encodeCode")(n,r,t)+o;return"¨C"+(t.gHtmlSpans.push(i)-1)+"C"},"
",r,t);return e=e.replace(/^ {0,2}( ?-){3,}[ \t]*$/gm,n),e=e.replace(/^ {0,2}( ?\*){3,}[ \t]*$/gm,n),e=e.replace(/^ {0,2}( ?_){3,}[ \t]*$/gm,n),e=t.converter._dispatch("horizontalRule.after",e,r,t)}),a.subParser("images",function(e,r,t){"use strict";function n(e,r,n,s,o,i,l,c){var u=t.gUrls,d=t.gTitles,p=t.gDimensions;if(n=n.toLowerCase(),c||(c=""),e.search(/\(? ?(['"].*['"])?\)$/m)>-1)s="";else if(""===s||null===s){if(""!==n&&null!==n||(n=r.toLowerCase().replace(/ ?\n/g," ")),s="#"+n,a.helper.isUndefined(u[n]))return e;s=u[n],a.helper.isUndefined(d[n])||(c=d[n]),a.helper.isUndefined(p[n])||(o=p[n].width,i=p[n].height)}r=r.replace(/"/g,""").replace(a.helper.regexes.asteriskDashAndColon,a.helper.escapeCharactersCallback);var h='"}return e=(e=t.converter._dispatch("images.before",e,r,t)).replace(/!\[([^\]]*?)] ?(?:\n *)?\[([\s\S]*?)]()()()()()/g,n),e=e.replace(/!\[([^\]]*?)][ \t]*()\([ \t]??(?: =([*\d]+[A-Za-z%]{0,4})x([*\d]+[A-Za-z%]{0,4}))?[ \t]*(?:(["'])([^"]*?)\6)?[ \t]?\)/g,function(e,r,t,a,s,o,i,l){return a=a.replace(/\s/g,""),n(e,r,t,a,s,o,0,l)}),e=e.replace(/!\[([^\]]*?)][ \t]*()\([ \t]?<([^>]*)>(?: =([*\d]+[A-Za-z%]{0,4})x([*\d]+[A-Za-z%]{0,4}))?[ \t]*(?:(?:(["'])([^"]*?)\6))?[ \t]?\)/g,n),e=e.replace(/!\[([^\]]*?)][ \t]*()\([ \t]??(?: =([*\d]+[A-Za-z%]{0,4})x([*\d]+[A-Za-z%]{0,4}))?[ \t]*(?:(["'])([^"]*?)\6)?[ \t]?\)/g,n),e=e.replace(/!\[([^\[\]]+)]()()()()()/g,n),e=t.converter._dispatch("images.after",e,r,t)}),a.subParser("italicsAndBold",function(e,r,t){"use strict";function a(e,r,t){return r+e+t}return e=t.converter._dispatch("italicsAndBold.before",e,r,t),e=r.literalMidWordUnderscores?(e=(e=e.replace(/\b___(\S[\s\S]*?)___\b/g,function(e,r){return a(r,"","")})).replace(/\b__(\S[\s\S]*?)__\b/g,function(e,r){return a(r,"","")})).replace(/\b_(\S[\s\S]*?)_\b/g,function(e,r){return a(r,"","")}):(e=(e=e.replace(/___(\S[\s\S]*?)___/g,function(e,r){return/\S$/.test(r)?a(r,"",""):e})).replace(/__(\S[\s\S]*?)__/g,function(e,r){return/\S$/.test(r)?a(r,"",""):e})).replace(/_([^\s_][\s\S]*?)_/g,function(e,r){return/\S$/.test(r)?a(r,"",""):e}),e=r.literalMidWordAsterisks?(e=(e=e.replace(/([^*]|^)\B\*\*\*(\S[\s\S]*?)\*\*\*\B(?!\*)/g,function(e,r,t){return a(t,r+"","")})).replace(/([^*]|^)\B\*\*(\S[\s\S]*?)\*\*\B(?!\*)/g,function(e,r,t){return a(t,r+"","")})).replace(/([^*]|^)\B\*(\S[\s\S]*?)\*\B(?!\*)/g,function(e,r,t){return a(t,r+"","")}):(e=(e=e.replace(/\*\*\*(\S[\s\S]*?)\*\*\*/g,function(e,r){return/\S$/.test(r)?a(r,"",""):e})).replace(/\*\*(\S[\s\S]*?)\*\*/g,function(e,r){return/\S$/.test(r)?a(r,"",""):e})).replace(/\*([^\s*][\s\S]*?)\*/g,function(e,r){return/\S$/.test(r)?a(r,"",""):e}),e=t.converter._dispatch("italicsAndBold.after",e,r,t)}),a.subParser("lists",function(e,r,t){"use strict";function n(e,n){t.gListLevel++,e=e.replace(/\n{2,}$/,"\n");var s=/(\n)?(^ {0,3})([*+-]|\d+[.])[ \t]+((\[(x|X| )?])?[ \t]*[^\r]+?(\n{1,2}))(?=\n*(¨0| {0,3}([*+-]|\d+[.])[ \t]+))/gm,o=/\n[ \t]*\n(?!¨0)/.test(e+="¨0");return r.disableForced4SpacesIndentedSublists&&(s=/(\n)?(^ {0,3})([*+-]|\d+[.])[ \t]+((\[(x|X| )?])?[ \t]*[^\r]+?(\n{1,2}))(?=\n*(¨0|\2([*+-]|\d+[.])[ \t]+))/gm),e=e.replace(s,function(e,n,s,i,l,c,u){u=u&&""!==u.trim();var d=a.subParser("outdent")(l,r,t),p="";return c&&r.tasklists&&(p=' class="task-list-item" style="list-style-type: none;"',d=d.replace(/^[ \t]*\[(x|X| )?]/m,function(){var e='-1?(d=a.subParser("githubCodeBlocks")(d,r,t),d=a.subParser("blockGamut")(d,r,t)):(d=(d=a.subParser("lists")(d,r,t)).replace(/\n$/,""),d=(d=a.subParser("hashHTMLBlocks")(d,r,t)).replace(/\n\n+/g,"\n\n"),d=o?a.subParser("paragraphs")(d,r,t):a.subParser("spanGamut")(d,r,t)),d=d.replace("¨A",""),d="
\n")):e=e.replace(/ +\n/g,"
\n"),e=t.converter._dispatch("spanGamut.after",e,r,t)}),a.subParser("strikethrough",function(e,r,t){"use strict";return r.strikethrough&&(e=(e=t.converter._dispatch("strikethrough.before",e,r,t)).replace(/(?:~){2}([\s\S]+?)(?:~){2}/g,function(e,n){return function(e){return r.simplifiedAutoLink&&(e=a.subParser("simplifiedAutoLinks")(e,r,t)),""+e+""}(n)}),e=t.converter._dispatch("strikethrough.after",e,r,t)),e}),a.subParser("stripLinkDefinitions",function(e,r,t){"use strict";var n=function(e,n,s,o,i,l,c){return n=n.toLowerCase(),s.match(/^data:.+?\/.+?;base64,/)?t.gUrls[n]=s.replace(/\s/g,""):t.gUrls[n]=a.subParser("encodeAmpsAndAngles")(s,r,t),l?l+c:(c&&(t.gTitles[n]=c.replace(/"|'/g,""")),r.parseImgDimensions&&o&&i&&(t.gDimensions[n]={width:o,height:i}),"")};return e=(e+="¨0").replace(/^ {0,3}\[(.+)]:[ \t]*\n?[ \t]*?(?: =([*\d]+[A-Za-z%]{0,4})x([*\d]+[A-Za-z%]{0,4}))?[ \t]*\n?[ \t]*(?:(\n*)["|'(](.+?)["|')][ \t]*)?(?:\n\n|(?=¨0)|(?=\n\[))/gm,n),e=e.replace(/^ {0,3}\[(.+)]:[ \t]*\n?[ \t]*\s]+)>?(?: =([*\d]+[A-Za-z%]{0,4})x([*\d]+[A-Za-z%]{0,4}))?[ \t]*\n?[ \t]*(?:(\n*)["|'(](.+?)["|')][ \t]*)?(?:\n+|(?=¨0))/gm,n),e=e.replace(/¨0/,"")}),a.subParser("tables",function(e,r,t){"use strict";function n(e){return/^:[ \t]*--*$/.test(e)?' style="text-align:left;"':/^--*[ \t]*:[ \t]*$/.test(e)?' style="text-align:right;"':/^:[ \t]*--*[ \t]*:$/.test(e)?' style="text-align:center;"':""}function s(e,n){var s="";return e=e.trim(),(r.tablesHeaderId||r.tableHeaderId)&&(s=' id="'+e.replace(/ /g,"_").toLowerCase()+'"'),e=a.subParser("spanGamut")(e,r,t),">t<>", "<", ">", "g")
+ * returns: ["t<", ""]
+ * matchRecursiveRegExp("test", "![]() ',
+ 'showdown': 'S'
+};
+
+/**
+ * Created by Estevao on 31-05-2015.
+ */
+
+/**
+ * Showdown Converter class
+ * @class
+ * @param {object} [converterOptions]
+ * @returns {Converter}
+ */
+showdown.Converter = function (converterOptions) {
+ 'use strict';
+
+ var
+ /**
+ * Options used by this converter
+ * @private
+ * @type {{}}
+ */
+ options = {},
+
+ /**
+ * Language extensions used by this converter
+ * @private
+ * @type {Array}
+ */
+ langExtensions = [],
+
+ /**
+ * Output modifiers extensions used by this converter
+ * @private
+ * @type {Array}
+ */
+ outputModifiers = [],
+
+ /**
+ * Event listeners
+ * @private
+ * @type {{}}
+ */
+ listeners = {},
+
+ /**
+ * The flavor set in this converter
+ */
+ setConvFlavor = setFlavor,
+
+ /**
+ * Metadata of the document
+ * @type {{parsed: {}, raw: string, format: string}}
+ */
+ metadata = {
+ parsed: {},
+ raw: '',
+ format: ''
+ };
+
+ _constructor();
+
+ /**
+ * Converter constructor
+ * @private
+ */
+ function _constructor () {
+ converterOptions = converterOptions || {};
+
+ for (var gOpt in globalOptions) {
+ if (globalOptions.hasOwnProperty(gOpt)) {
+ options[gOpt] = globalOptions[gOpt];
+ }
+ }
+
+ // Merge options
+ if (typeof converterOptions === 'object') {
+ for (var opt in converterOptions) {
+ if (converterOptions.hasOwnProperty(opt)) {
+ options[opt] = converterOptions[opt];
+ }
+ }
+ } else {
+ throw Error('Converter expects the passed parameter to be an object, but ' + typeof converterOptions +
+ ' was passed instead.');
+ }
+
+ if (options.extensions) {
+ showdown.helper.forEach(options.extensions, _parseExtension);
+ }
+ }
+
+ /**
+ * Parse extension
+ * @param {*} ext
+ * @param {string} [name='']
+ * @private
+ */
+ function _parseExtension (ext, name) {
+
+ name = name || null;
+ // If it's a string, the extension was previously loaded
+ if (showdown.helper.isString(ext)) {
+ ext = showdown.helper.stdExtName(ext);
+ name = ext;
+
+ // LEGACY_SUPPORT CODE
+ if (showdown.extensions[ext]) {
+ console.warn('DEPRECATION WARNING: ' + ext + ' is an old extension that uses a deprecated loading method.' +
+ 'Please inform the developer that the extension should be updated!');
+ legacyExtensionLoading(showdown.extensions[ext], ext);
+ return;
+ // END LEGACY SUPPORT CODE
+
+ } else if (!showdown.helper.isUndefined(extensions[ext])) {
+ ext = extensions[ext];
+
+ } else {
+ throw Error('Extension "' + ext + '" could not be loaded. It was either not found or is not a valid extension.');
+ }
+ }
+
+ if (typeof ext === 'function') {
+ ext = ext();
+ }
+
+ if (!showdown.helper.isArray(ext)) {
+ ext = [ext];
+ }
+
+ var validExt = validate(ext, name);
+ if (!validExt.valid) {
+ throw Error(validExt.error);
+ }
+
+ for (var i = 0; i < ext.length; ++i) {
+ switch (ext[i].type) {
+
+ case 'lang':
+ langExtensions.push(ext[i]);
+ break;
+
+ case 'output':
+ outputModifiers.push(ext[i]);
+ break;
+ }
+ if (ext[i].hasOwnProperty('listeners')) {
+ for (var ln in ext[i].listeners) {
+ if (ext[i].listeners.hasOwnProperty(ln)) {
+ listen(ln, ext[i].listeners[ln]);
+ }
+ }
+ }
+ }
+
+ }
+
+ /**
+ * LEGACY_SUPPORT
+ * @param {*} ext
+ * @param {string} name
+ */
+ function legacyExtensionLoading (ext, name) {
+ if (typeof ext === 'function') {
+ ext = ext(new showdown.Converter());
+ }
+ if (!showdown.helper.isArray(ext)) {
+ ext = [ext];
+ }
+ var valid = validate(ext, name);
+
+ if (!valid.valid) {
+ throw Error(valid.error);
+ }
+
+ for (var i = 0; i < ext.length; ++i) {
+ switch (ext[i].type) {
+ case 'lang':
+ langExtensions.push(ext[i]);
+ break;
+ case 'output':
+ outputModifiers.push(ext[i]);
+ break;
+ default:// should never reach here
+ throw Error('Extension loader error: Type unrecognized!!!');
+ }
+ }
+ }
+
+ /**
+ * Listen to an event
+ * @param {string} name
+ * @param {function} callback
+ */
+ function listen (name, callback) {
+ if (!showdown.helper.isString(name)) {
+ throw Error('Invalid argument in converter.listen() method: name must be a string, but ' + typeof name + ' given');
+ }
+
+ if (typeof callback !== 'function') {
+ throw Error('Invalid argument in converter.listen() method: callback must be a function, but ' + typeof callback + ' given');
+ }
+
+ if (!listeners.hasOwnProperty(name)) {
+ listeners[name] = [];
+ }
+ listeners[name].push(callback);
+ }
+
+ function rTrimInputText (text) {
+ var rsp = text.match(/^\s*/)[0].length,
+ rgx = new RegExp('^\\s{0,' + rsp + '}', 'gm');
+ return text.replace(rgx, '');
+ }
+
+ /**
+ * Dispatch an event
+ * @private
+ * @param {string} evtName Event name
+ * @param {string} text Text
+ * @param {{}} options Converter Options
+ * @param {{}} globals
+ * @returns {string}
+ */
+ this._dispatch = function dispatch (evtName, text, options, globals) {
+ if (listeners.hasOwnProperty(evtName)) {
+ for (var ei = 0; ei < listeners[evtName].length; ++ei) {
+ var nText = listeners[evtName][ei](evtName, text, this, options, globals);
+ if (nText && typeof nText !== 'undefined') {
+ text = nText;
+ }
+ }
+ }
+ return text;
+ };
+
+ /**
+ * Listen to an event
+ * @param {string} name
+ * @param {function} callback
+ * @returns {showdown.Converter}
+ */
+ this.listen = function (name, callback) {
+ listen(name, callback);
+ return this;
+ };
+
+ /**
+ * Converts a markdown string into HTML
+ * @param {string} text
+ * @returns {*}
+ */
+ this.makeHtml = function (text) {
+ //check if text is not falsy
+ if (!text) {
+ return text;
+ }
+
+ var globals = {
+ gHtmlBlocks: [],
+ gHtmlMdBlocks: [],
+ gHtmlSpans: [],
+ gUrls: {},
+ gTitles: {},
+ gDimensions: {},
+ gListLevel: 0,
+ hashLinkCounts: {},
+ langExtensions: langExtensions,
+ outputModifiers: outputModifiers,
+ converter: this,
+ ghCodeBlocks: [],
+ metadata: {
+ parsed: {},
+ raw: '',
+ format: ''
+ }
+ };
+
+ // This lets us use ¨ trema as an escape char to avoid md5 hashes
+ // The choice of character is arbitrary; anything that isn't
+ // magic in Markdown will work.
+ text = text.replace(/¨/g, '¨T');
+
+ // Replace $ with ¨D
+ // RegExp interprets $ as a special character
+ // when it's in a replacement string
+ text = text.replace(/\$/g, '¨D');
+
+ // Standardize line endings
+ text = text.replace(/\r\n/g, '\n'); // DOS to Unix
+ text = text.replace(/\r/g, '\n'); // Mac to Unix
+
+ // Stardardize line spaces
+ text = text.replace(/\u00A0/g, ' ');
+
+ if (options.smartIndentationFix) {
+ text = rTrimInputText(text);
+ }
+
+ // Make sure text begins and ends with a couple of newlines:
+ text = '\n\n' + text + '\n\n';
+
+ // detab
+ text = showdown.subParser('detab')(text, options, globals);
+
+ /**
+ * Strip any lines consisting only of spaces and tabs.
+ * This makes subsequent regexs easier to write, because we can
+ * match consecutive blank lines with /\n+/ instead of something
+ * contorted like /[ \t]*\n+/
+ */
+ text = text.replace(/^[ \t]+$/mg, '');
+
+ //run languageExtensions
+ showdown.helper.forEach(langExtensions, function (ext) {
+ text = showdown.subParser('runExtension')(ext, text, options, globals);
+ });
+
+ // run the sub parsers
+ text = showdown.subParser('metadata')(text, options, globals);
+ text = showdown.subParser('hashPreCodeTags')(text, options, globals);
+ text = showdown.subParser('githubCodeBlocks')(text, options, globals);
+ text = showdown.subParser('hashHTMLBlocks')(text, options, globals);
+ text = showdown.subParser('hashCodeTags')(text, options, globals);
+ text = showdown.subParser('stripLinkDefinitions')(text, options, globals);
+ text = showdown.subParser('blockGamut')(text, options, globals);
+ text = showdown.subParser('unhashHTMLSpans')(text, options, globals);
+ text = showdown.subParser('unescapeSpecialChars')(text, options, globals);
+
+ // attacklab: Restore dollar signs
+ text = text.replace(/¨D/g, '$$');
+
+ // attacklab: Restore tremas
+ text = text.replace(/¨T/g, '¨');
+
+ // render a complete html document instead of a partial if the option is enabled
+ text = showdown.subParser('completeHTMLDocument')(text, options, globals);
+
+ // Run output modifiers
+ showdown.helper.forEach(outputModifiers, function (ext) {
+ text = showdown.subParser('runExtension')(ext, text, options, globals);
+ });
+
+ // update metadata
+ metadata = globals.metadata;
+ return text;
+ };
+
+ /**
+ * Converts an HTML string into a markdown string
+ * @param src
+ * @param [HTMLParser] A WHATWG DOM and HTML parser, such as JSDOM. If none is supplied, window.document will be used.
+ * @returns {string}
+ */
+ this.makeMarkdown = this.makeMd = function (src, HTMLParser) {
+
+ // replace \r\n with \n
+ src = src.replace(/\r\n/g, '\n');
+ src = src.replace(/\r/g, '\n'); // old macs
+
+ // due to an edge case, we need to find this: > <
+ // to prevent removing of non silent white spaces
+ // ex: this is sparta
+ src = src.replace(/>[ \t]+¨NBSP;<');
+
+ if (!HTMLParser) {
+ if (window && window.document) {
+ HTMLParser = window.document;
+ } else {
+ throw new Error('HTMLParser is undefined. If in a webworker or nodejs environment, you need to provide a WHATWG DOM and HTML such as JSDOM');
+ }
+ }
+
+ var doc = HTMLParser.createElement('div');
+ doc.innerHTML = src;
+
+ var globals = {
+ preList: substitutePreCodeTags(doc)
+ };
+
+ // remove all newlines and collapse spaces
+ clean(doc);
+
+ // some stuff, like accidental reference links must now be escaped
+ // TODO
+ // doc.innerHTML = doc.innerHTML.replace(/\[[\S\t ]]/);
+
+ var nodes = doc.childNodes,
+ mdDoc = '';
+
+ for (var i = 0; i < nodes.length; i++) {
+ mdDoc += showdown.subParser('makeMarkdown.node')(nodes[i], globals);
+ }
+
+ function clean (node) {
+ for (var n = 0; n < node.childNodes.length; ++n) {
+ var child = node.childNodes[n];
+ if (child.nodeType === 3) {
+ if (!/\S/.test(child.nodeValue)) {
+ node.removeChild(child);
+ --n;
+ } else {
+ child.nodeValue = child.nodeValue.split('\n').join(' ');
+ child.nodeValue = child.nodeValue.replace(/(\s)+/g, '$1');
+ }
+ } else if (child.nodeType === 1) {
+ clean(child);
+ }
+ }
+ }
+
+ // find all pre tags and replace contents with placeholder
+ // we need this so that we can remove all indentation from html
+ // to ease up parsing
+ function substitutePreCodeTags (doc) {
+
+ var pres = doc.querySelectorAll('pre'),
+ presPH = [];
+
+ for (var i = 0; i < pres.length; ++i) {
+
+ if (pres[i].childElementCount === 1 && pres[i].firstChild.tagName.toLowerCase() === 'code') {
+ var content = pres[i].firstChild.innerHTML.trim(),
+ language = pres[i].firstChild.getAttribute('data-language') || '';
+
+ // if data-language attribute is not defined, then we look for class language-*
+ if (language === '') {
+ var classes = pres[i].firstChild.className.split(' ');
+ for (var c = 0; c < classes.length; ++c) {
+ var matches = classes[c].match(/^language-(.+)$/);
+ if (matches !== null) {
+ language = matches[1];
+ break;
+ }
+ }
+ }
+
+ // unescape html entities in content
+ content = showdown.helper.unescapeHTMLEntities(content);
+
+ presPH.push(content);
+ pres[i].outerHTML = '
',
+ 'showdown': 'S'
+};
+
+/**
+ * Created by Estevao on 31-05-2015.
+ */
+
+/**
+ * Showdown Converter class
+ * @class
+ * @param {object} [converterOptions]
+ * @returns {Converter}
+ */
+showdown.Converter = function (converterOptions) {
+ 'use strict';
+
+ var
+ /**
+ * Options used by this converter
+ * @private
+ * @type {{}}
+ */
+ options = {},
+
+ /**
+ * Language extensions used by this converter
+ * @private
+ * @type {Array}
+ */
+ langExtensions = [],
+
+ /**
+ * Output modifiers extensions used by this converter
+ * @private
+ * @type {Array}
+ */
+ outputModifiers = [],
+
+ /**
+ * Event listeners
+ * @private
+ * @type {{}}
+ */
+ listeners = {},
+
+ /**
+ * The flavor set in this converter
+ */
+ setConvFlavor = setFlavor,
+
+ /**
+ * Metadata of the document
+ * @type {{parsed: {}, raw: string, format: string}}
+ */
+ metadata = {
+ parsed: {},
+ raw: '',
+ format: ''
+ };
+
+ _constructor();
+
+ /**
+ * Converter constructor
+ * @private
+ */
+ function _constructor () {
+ converterOptions = converterOptions || {};
+
+ for (var gOpt in globalOptions) {
+ if (globalOptions.hasOwnProperty(gOpt)) {
+ options[gOpt] = globalOptions[gOpt];
+ }
+ }
+
+ // Merge options
+ if (typeof converterOptions === 'object') {
+ for (var opt in converterOptions) {
+ if (converterOptions.hasOwnProperty(opt)) {
+ options[opt] = converterOptions[opt];
+ }
+ }
+ } else {
+ throw Error('Converter expects the passed parameter to be an object, but ' + typeof converterOptions +
+ ' was passed instead.');
+ }
+
+ if (options.extensions) {
+ showdown.helper.forEach(options.extensions, _parseExtension);
+ }
+ }
+
+ /**
+ * Parse extension
+ * @param {*} ext
+ * @param {string} [name='']
+ * @private
+ */
+ function _parseExtension (ext, name) {
+
+ name = name || null;
+ // If it's a string, the extension was previously loaded
+ if (showdown.helper.isString(ext)) {
+ ext = showdown.helper.stdExtName(ext);
+ name = ext;
+
+ // LEGACY_SUPPORT CODE
+ if (showdown.extensions[ext]) {
+ console.warn('DEPRECATION WARNING: ' + ext + ' is an old extension that uses a deprecated loading method.' +
+ 'Please inform the developer that the extension should be updated!');
+ legacyExtensionLoading(showdown.extensions[ext], ext);
+ return;
+ // END LEGACY SUPPORT CODE
+
+ } else if (!showdown.helper.isUndefined(extensions[ext])) {
+ ext = extensions[ext];
+
+ } else {
+ throw Error('Extension "' + ext + '" could not be loaded. It was either not found or is not a valid extension.');
+ }
+ }
+
+ if (typeof ext === 'function') {
+ ext = ext();
+ }
+
+ if (!showdown.helper.isArray(ext)) {
+ ext = [ext];
+ }
+
+ var validExt = validate(ext, name);
+ if (!validExt.valid) {
+ throw Error(validExt.error);
+ }
+
+ for (var i = 0; i < ext.length; ++i) {
+ switch (ext[i].type) {
+
+ case 'lang':
+ langExtensions.push(ext[i]);
+ break;
+
+ case 'output':
+ outputModifiers.push(ext[i]);
+ break;
+ }
+ if (ext[i].hasOwnProperty('listeners')) {
+ for (var ln in ext[i].listeners) {
+ if (ext[i].listeners.hasOwnProperty(ln)) {
+ listen(ln, ext[i].listeners[ln]);
+ }
+ }
+ }
+ }
+
+ }
+
+ /**
+ * LEGACY_SUPPORT
+ * @param {*} ext
+ * @param {string} name
+ */
+ function legacyExtensionLoading (ext, name) {
+ if (typeof ext === 'function') {
+ ext = ext(new showdown.Converter());
+ }
+ if (!showdown.helper.isArray(ext)) {
+ ext = [ext];
+ }
+ var valid = validate(ext, name);
+
+ if (!valid.valid) {
+ throw Error(valid.error);
+ }
+
+ for (var i = 0; i < ext.length; ++i) {
+ switch (ext[i].type) {
+ case 'lang':
+ langExtensions.push(ext[i]);
+ break;
+ case 'output':
+ outputModifiers.push(ext[i]);
+ break;
+ default:// should never reach here
+ throw Error('Extension loader error: Type unrecognized!!!');
+ }
+ }
+ }
+
+ /**
+ * Listen to an event
+ * @param {string} name
+ * @param {function} callback
+ */
+ function listen (name, callback) {
+ if (!showdown.helper.isString(name)) {
+ throw Error('Invalid argument in converter.listen() method: name must be a string, but ' + typeof name + ' given');
+ }
+
+ if (typeof callback !== 'function') {
+ throw Error('Invalid argument in converter.listen() method: callback must be a function, but ' + typeof callback + ' given');
+ }
+
+ if (!listeners.hasOwnProperty(name)) {
+ listeners[name] = [];
+ }
+ listeners[name].push(callback);
+ }
+
+ function rTrimInputText (text) {
+ var rsp = text.match(/^\s*/)[0].length,
+ rgx = new RegExp('^\\s{0,' + rsp + '}', 'gm');
+ return text.replace(rgx, '');
+ }
+
+ /**
+ * Dispatch an event
+ * @private
+ * @param {string} evtName Event name
+ * @param {string} text Text
+ * @param {{}} options Converter Options
+ * @param {{}} globals
+ * @returns {string}
+ */
+ this._dispatch = function dispatch (evtName, text, options, globals) {
+ if (listeners.hasOwnProperty(evtName)) {
+ for (var ei = 0; ei < listeners[evtName].length; ++ei) {
+ var nText = listeners[evtName][ei](evtName, text, this, options, globals);
+ if (nText && typeof nText !== 'undefined') {
+ text = nText;
+ }
+ }
+ }
+ return text;
+ };
+
+ /**
+ * Listen to an event
+ * @param {string} name
+ * @param {function} callback
+ * @returns {showdown.Converter}
+ */
+ this.listen = function (name, callback) {
+ listen(name, callback);
+ return this;
+ };
+
+ /**
+ * Converts a markdown string into HTML
+ * @param {string} text
+ * @returns {*}
+ */
+ this.makeHtml = function (text) {
+ //check if text is not falsy
+ if (!text) {
+ return text;
+ }
+
+ var globals = {
+ gHtmlBlocks: [],
+ gHtmlMdBlocks: [],
+ gHtmlSpans: [],
+ gUrls: {},
+ gTitles: {},
+ gDimensions: {},
+ gListLevel: 0,
+ hashLinkCounts: {},
+ langExtensions: langExtensions,
+ outputModifiers: outputModifiers,
+ converter: this,
+ ghCodeBlocks: [],
+ metadata: {
+ parsed: {},
+ raw: '',
+ format: ''
+ }
+ };
+
+ // This lets us use ¨ trema as an escape char to avoid md5 hashes
+ // The choice of character is arbitrary; anything that isn't
+ // magic in Markdown will work.
+ text = text.replace(/¨/g, '¨T');
+
+ // Replace $ with ¨D
+ // RegExp interprets $ as a special character
+ // when it's in a replacement string
+ text = text.replace(/\$/g, '¨D');
+
+ // Standardize line endings
+ text = text.replace(/\r\n/g, '\n'); // DOS to Unix
+ text = text.replace(/\r/g, '\n'); // Mac to Unix
+
+ // Stardardize line spaces
+ text = text.replace(/\u00A0/g, ' ');
+
+ if (options.smartIndentationFix) {
+ text = rTrimInputText(text);
+ }
+
+ // Make sure text begins and ends with a couple of newlines:
+ text = '\n\n' + text + '\n\n';
+
+ // detab
+ text = showdown.subParser('detab')(text, options, globals);
+
+ /**
+ * Strip any lines consisting only of spaces and tabs.
+ * This makes subsequent regexs easier to write, because we can
+ * match consecutive blank lines with /\n+/ instead of something
+ * contorted like /[ \t]*\n+/
+ */
+ text = text.replace(/^[ \t]+$/mg, '');
+
+ //run languageExtensions
+ showdown.helper.forEach(langExtensions, function (ext) {
+ text = showdown.subParser('runExtension')(ext, text, options, globals);
+ });
+
+ // run the sub parsers
+ text = showdown.subParser('metadata')(text, options, globals);
+ text = showdown.subParser('hashPreCodeTags')(text, options, globals);
+ text = showdown.subParser('githubCodeBlocks')(text, options, globals);
+ text = showdown.subParser('hashHTMLBlocks')(text, options, globals);
+ text = showdown.subParser('hashCodeTags')(text, options, globals);
+ text = showdown.subParser('stripLinkDefinitions')(text, options, globals);
+ text = showdown.subParser('blockGamut')(text, options, globals);
+ text = showdown.subParser('unhashHTMLSpans')(text, options, globals);
+ text = showdown.subParser('unescapeSpecialChars')(text, options, globals);
+
+ // attacklab: Restore dollar signs
+ text = text.replace(/¨D/g, '$$');
+
+ // attacklab: Restore tremas
+ text = text.replace(/¨T/g, '¨');
+
+ // render a complete html document instead of a partial if the option is enabled
+ text = showdown.subParser('completeHTMLDocument')(text, options, globals);
+
+ // Run output modifiers
+ showdown.helper.forEach(outputModifiers, function (ext) {
+ text = showdown.subParser('runExtension')(ext, text, options, globals);
+ });
+
+ // update metadata
+ metadata = globals.metadata;
+ return text;
+ };
+
+ /**
+ * Converts an HTML string into a markdown string
+ * @param src
+ * @param [HTMLParser] A WHATWG DOM and HTML parser, such as JSDOM. If none is supplied, window.document will be used.
+ * @returns {string}
+ */
+ this.makeMarkdown = this.makeMd = function (src, HTMLParser) {
+
+ // replace \r\n with \n
+ src = src.replace(/\r\n/g, '\n');
+ src = src.replace(/\r/g, '\n'); // old macs
+
+ // due to an edge case, we need to find this: > <
+ // to prevent removing of non silent white spaces
+ // ex: this is sparta
+ src = src.replace(/>[ \t]+¨NBSP;<');
+
+ if (!HTMLParser) {
+ if (window && window.document) {
+ HTMLParser = window.document;
+ } else {
+ throw new Error('HTMLParser is undefined. If in a webworker or nodejs environment, you need to provide a WHATWG DOM and HTML such as JSDOM');
+ }
+ }
+
+ var doc = HTMLParser.createElement('div');
+ doc.innerHTML = src;
+
+ var globals = {
+ preList: substitutePreCodeTags(doc)
+ };
+
+ // remove all newlines and collapse spaces
+ clean(doc);
+
+ // some stuff, like accidental reference links must now be escaped
+ // TODO
+ // doc.innerHTML = doc.innerHTML.replace(/\[[\S\t ]]/);
+
+ var nodes = doc.childNodes,
+ mdDoc = '';
+
+ for (var i = 0; i < nodes.length; i++) {
+ mdDoc += showdown.subParser('makeMarkdown.node')(nodes[i], globals);
+ }
+
+ function clean (node) {
+ for (var n = 0; n < node.childNodes.length; ++n) {
+ var child = node.childNodes[n];
+ if (child.nodeType === 3) {
+ if (!/\S/.test(child.nodeValue)) {
+ node.removeChild(child);
+ --n;
+ } else {
+ child.nodeValue = child.nodeValue.split('\n').join(' ');
+ child.nodeValue = child.nodeValue.replace(/(\s)+/g, '$1');
+ }
+ } else if (child.nodeType === 1) {
+ clean(child);
+ }
+ }
+ }
+
+ // find all pre tags and replace contents with placeholder
+ // we need this so that we can remove all indentation from html
+ // to ease up parsing
+ function substitutePreCodeTags (doc) {
+
+ var pres = doc.querySelectorAll('pre'),
+ presPH = [];
+
+ for (var i = 0; i < pres.length; ++i) {
+
+ if (pres[i].childElementCount === 1 && pres[i].firstChild.tagName.toLowerCase() === 'code') {
+ var content = pres[i].firstChild.innerHTML.trim(),
+ language = pres[i].firstChild.getAttribute('data-language') || '';
+
+ // if data-language attribute is not defined, then we look for class language-*
+ if (language === '') {
+ var classes = pres[i].firstChild.className.split(' ');
+ for (var c = 0; c < classes.length; ++c) {
+ var matches = classes[c].match(/^language-(.+)$/);
+ if (matches !== null) {
+ language = matches[1];
+ break;
+ }
+ }
+ }
+
+ // unescape html entities in content
+ content = showdown.helper.unescapeHTMLEntities(content);
+
+ presPH.push(content);
+ pres[i].outerHTML = ' content, so we need to fix that:
+ bq = bq.replace(/(\s*
[^\r]+?<\/pre>)/gm, function (wholeMatch, m1) {
+ var pre = m1;
+ // attacklab: hack around Konqueror 3.5.4 bug:
+ pre = pre.replace(/^ /mg, '¨0');
+ pre = pre.replace(/¨0/g, '');
+ return pre;
+ });
+
+ return showdown.subParser('hashBlock')('\n' + bq + '\n
', options, globals);
+ });
+
+ text = globals.converter._dispatch('blockQuotes.after', text, options, globals);
+ return text;
+});
+
+/**
+ * Process Markdown `
';
+
+ codeblock = showdown.subParser('hashBlock')(codeblock, options, globals);
+
+ // Since GHCodeblocks can be false positives, we need to
+ // store the primitive text and the parsed text in a global var,
+ // and then return a token
+ return '\n\n¨G' + (globals.ghCodeBlocks.push({text: wholeMatch, codeblock: codeblock}) - 1) + 'G\n\n';
+ });
+
+ // attacklab: strip sentinel
+ text = text.replace(/¨0/, '');
+
+ return globals.converter._dispatch('githubCodeBlocks.after', text, options, globals);
+});
+
+showdown.subParser('hashBlock', function (text, options, globals) {
+ 'use strict';
+ text = globals.converter._dispatch('hashBlock.before', text, options, globals);
+ text = text.replace(/(^\n+|\n+$)/g, '');
+ text = '\n\n¨K' + (globals.gHtmlBlocks.push(text) - 1) + 'K\n\n';
+ text = globals.converter._dispatch('hashBlock.after', text, options, globals);
+ return text;
+});
+
+/**
+ * Hash and escape ` blocks.
+ */
+showdown.subParser('codeBlocks', function (text, options, globals) {
+ 'use strict';
+
+ text = globals.converter._dispatch('codeBlocks.before', text, options, globals);
+
+ // sentinel workarounds for lack of \A and \Z, safari\khtml bug
+ text += '¨0';
+
+ var pattern = /(?:\n\n|^)((?:(?:[ ]{4}|\t).*\n+)+)(\n*[ ]{0,3}[^ \t\n]|(?=¨0))/g;
+ text = text.replace(pattern, function (wholeMatch, m1, m2) {
+ var codeblock = m1,
+ nextChar = m2,
+ end = '\n';
+
+ codeblock = showdown.subParser('outdent')(codeblock, options, globals);
+ codeblock = showdown.subParser('encodeCode')(codeblock, options, globals);
+ codeblock = showdown.subParser('detab')(codeblock, options, globals);
+ codeblock = codeblock.replace(/^\n+/g, ''); // trim leading newlines
+ codeblock = codeblock.replace(/\n+$/g, ''); // trim trailing newlines
+
+ if (options.omitExtraWLInCodeBlocks) {
+ end = '';
+ }
+
+ codeblock = '
';
+
+ return showdown.subParser('hashBlock')(codeblock, options, globals) + nextChar;
+ });
+
+ // strip sentinel
+ text = text.replace(/¨0/, '');
+
+ text = globals.converter._dispatch('codeBlocks.after', text, options, globals);
+ return text;
+});
+
+/**
+ *
+ * * Backtick quotes are used for ' + codeblock + end + ' spans.
+ *
+ * * You can use multiple backticks as the delimiters if you want to
+ * include literal backticks in the code span. So, this input:
+ *
+ * Just type ``foo `bar` baz`` at the prompt.
+ *
+ * Will translate to:
+ *
+ * foo `bar` baz at the prompt.`bar` ...
+ */
+showdown.subParser('codeSpans', function (text, options, globals) {
+ 'use strict';
+
+ text = globals.converter._dispatch('codeSpans.before', text, options, globals);
+
+ if (typeof text === 'undefined') {
+ text = '';
+ }
+ text = text.replace(/(^|[^\\])(`+)([^\r]*?[^`])\2(?!`)/gm,
+ function (wholeMatch, m1, m2, m3) {
+ var c = m3;
+ c = c.replace(/^([ \t]*)/g, ''); // leading whitespace
+ c = c.replace(/[ \t]*$/g, ''); // trailing whitespace
+ c = showdown.subParser('encodeCode')(c, options, globals);
+ c = m1 + '' + c + '';
+ c = showdown.subParser('hashHTMLSpans')(c, options, globals);
+ return c;
+ }
+ );
+
+ text = globals.converter._dispatch('codeSpans.after', text, options, globals);
+ return text;
+});
+
+/**
+ * Create a full HTML document from the processed markdown
+ */
+showdown.subParser('completeHTMLDocument', function (text, options, globals) {
+ 'use strict';
+
+ if (!options.completeHTMLDocument) {
+ return text;
+ }
+
+ text = globals.converter._dispatch('completeHTMLDocument.before', text, options, globals);
+
+ var doctype = 'html',
+ doctypeParsed = '\n',
+ title = '',
+ charset = '\n',
+ lang = '',
+ metadata = '';
+
+ if (typeof globals.metadata.parsed.doctype !== 'undefined') {
+ doctypeParsed = '\n';
+ doctype = globals.metadata.parsed.doctype.toString().toLowerCase();
+ if (doctype === 'html' || doctype === 'html5') {
+ charset = '';
+ }
+ }
+
+ for (var meta in globals.metadata.parsed) {
+ if (globals.metadata.parsed.hasOwnProperty(meta)) {
+ switch (meta.toLowerCase()) {
+ case 'doctype':
+ break;
+
+ case 'title':
+ title = ' elements that should not be parsed as markdown
+ */
+showdown.subParser('hashCodeTags', function (text, options, globals) {
+ 'use strict';
+ text = globals.converter._dispatch('hashCodeTags.before', text, options, globals);
+
+ var repFunc = function (wholeMatch, match, left, right) {
+ var codeblock = left + showdown.subParser('encodeCode')(match, options, globals) + right;
+ return '¨C' + (globals.gHtmlSpans.push(codeblock) - 1) + 'C';
+ };
+
+ // Hash naked ', 'gi');*/
+
+ text = globals.converter._dispatch('hashHTMLSpans.after', text, options, globals);
+ return text;
+});
+
+/**
+ * Unhash HTML spans
+ */
+showdown.subParser('unhashHTMLSpans', function (text, options, globals) {
+ 'use strict';
+ text = globals.converter._dispatch('unhashHTMLSpans.before', text, options, globals);
+
+ for (var i = 0; i < globals.gHtmlSpans.length; ++i) {
+ var repText = globals.gHtmlSpans[i],
+ // limiter to prevent infinite loop (assume 10 as limit for recurse)
+ limit = 0;
+
+ while (/¨C(\d+)C/.test(repText)) {
+ var num = RegExp.$1;
+ repText = repText.replace('¨C' + num + 'C', globals.gHtmlSpans[num]);
+ if (limit === 10) {
+ console.error('maximum nesting of 10 spans reached!!!');
+ break;
+ }
+ ++limit;
+ }
+ text = text.replace('¨C' + i + 'C', repText);
+ }
+
+ text = globals.converter._dispatch('unhashHTMLSpans.after', text, options, globals);
+ return text;
+});
+
+/**
+ * Hash and escape
+ text = showdown.helper.replaceRecursiveRegExp(text, repFunc, '', 'gim');
+
+ text = globals.converter._dispatch('hashCodeTags.after', text, options, globals);
+ return text;
+});
+
+showdown.subParser('hashElement', function (text, options, globals) {
+ 'use strict';
+
+ return function (wholeMatch, m1) {
+ var blockText = m1;
+
+ // Undo double lines
+ blockText = blockText.replace(/\n\n/g, '\n');
+ blockText = blockText.replace(/^\n/, '');
+
+ // strip trailing blank lines
+ blockText = blockText.replace(/\n+$/g, '');
+
+ // Replace the element text with a marker ("¨KxK" where x is its key)
+ blockText = '\n\n¨K' + (globals.gHtmlBlocks.push(blockText) - 1) + 'K\n\n';
+
+ return blockText;
+ };
+});
+
+showdown.subParser('hashHTMLBlocks', function (text, options, globals) {
+ 'use strict';
+ text = globals.converter._dispatch('hashHTMLBlocks.before', text, options, globals);
+
+ var blockTags = [
+ 'pre',
+ 'div',
+ 'h1',
+ 'h2',
+ 'h3',
+ 'h4',
+ 'h5',
+ 'h6',
+ 'blockquote',
+ 'table',
+ 'dl',
+ 'ol',
+ 'ul',
+ 'script',
+ 'noscript',
+ 'form',
+ 'fieldset',
+ 'iframe',
+ 'math',
+ 'style',
+ 'section',
+ 'header',
+ 'footer',
+ 'nav',
+ 'article',
+ 'aside',
+ 'address',
+ 'audio',
+ 'canvas',
+ 'figure',
+ 'hgroup',
+ 'output',
+ 'video',
+ 'p'
+ ],
+ repFunc = function (wholeMatch, match, left, right) {
+ var txt = wholeMatch;
+ // check if this html element is marked as markdown
+ // if so, it's contents should be parsed as markdown
+ if (left.search(/\bmarkdown\b/) !== -1) {
+ txt = left + globals.converter.makeHtml(match) + right;
+ }
+ return '\n\n¨K' + (globals.gHtmlBlocks.push(txt) - 1) + 'K\n\n';
+ };
+
+ if (options.backslashEscapesHTMLTags) {
+ // encode backslash escaped HTML tags
+ text = text.replace(/\\<(\/?[^>]+?)>/g, function (wm, inside) {
+ return '<' + inside + '>';
+ });
+ }
+
+ // hash HTML Blocks
+ for (var i = 0; i < blockTags.length; ++i) {
+
+ var opTagPos,
+ rgx1 = new RegExp('^ {0,3}(<' + blockTags[i] + '\\b[^>]*>)', 'im'),
+ patLeft = '<' + blockTags[i] + '\\b[^>]*>',
+ patRight = '';
+ // 1. Look for the first position of the first opening HTML tag in the text
+ while ((opTagPos = showdown.helper.regexIndexOf(text, rgx1)) !== -1) {
+
+ // if the HTML tag is \ escaped, we need to escape it and break
+
+
+ //2. Split the text in that position
+ var subTexts = showdown.helper.splitAtIndex(text, opTagPos),
+ //3. Match recursively
+ newSubText1 = showdown.helper.replaceRecursiveRegExp(subTexts[1], repFunc, patLeft, patRight, 'im');
+
+ // prevent an infinite loop
+ if (newSubText1 === subTexts[1]) {
+ break;
+ }
+ text = subTexts[0].concat(newSubText1);
+ }
+ }
+ // HR SPECIAL CASE
+ text = text.replace(/(\n {0,3}(<(hr)\b([^<>])*?\/?>)[ \t]*(?=\n{2,}))/g,
+ showdown.subParser('hashElement')(text, options, globals));
+
+ // Special case for standalone HTML comments
+ text = showdown.helper.replaceRecursiveRegExp(text, function (txt) {
+ return '\n\n¨K' + (globals.gHtmlBlocks.push(txt) - 1) + 'K\n\n';
+ }, '^ {0,3}', 'gm');
+
+ // PHP and ASP-style processor instructions ( and <%...%>)
+ text = text.replace(/(?:\n\n)( {0,3}(?:<([?%])[^\r]*?\2>)[ \t]*(?=\n{2,}))/g,
+ showdown.subParser('hashElement')(text, options, globals));
+
+ text = globals.converter._dispatch('hashHTMLBlocks.after', text, options, globals);
+ return text;
+});
+
+/**
+ * Hash span elements that should not be parsed as markdown
+ */
+showdown.subParser('hashHTMLSpans', function (text, options, globals) {
+ 'use strict';
+ text = globals.converter._dispatch('hashHTMLSpans.before', text, options, globals);
+
+ function hashHTMLSpan (html) {
+ return '¨C' + (globals.gHtmlSpans.push(html) - 1) + 'C';
+ }
+
+ // Hash Self Closing tags
+ text = text.replace(/<[^>]+?\/>/gi, function (wm) {
+ return hashHTMLSpan(wm);
+ });
+
+ // Hash tags without properties
+ text = text.replace(/<([^>]+?)>[\s\S]*?<\/\1>/g, function (wm) {
+ return hashHTMLSpan(wm);
+ });
+
+ // Hash tags with properties
+ text = text.replace(/<([^>]+?)\s[^>]+?>[\s\S]*?<\/\1>/g, function (wm) {
+ return hashHTMLSpan(wm);
+ });
+
+ // Hash self closing tags without />
+ text = text.replace(/<[^>]+?>/gi, function (wm) {
+ return hashHTMLSpan(wm);
+ });
+
+ /*showdown.helper.matchRecursiveRegExp(text, ' elements that should not be parsed as markdown
+ */
+showdown.subParser('hashPreCodeTags', function (text, options, globals) {
+ 'use strict';
+ text = globals.converter._dispatch('hashPreCodeTags.before', text, options, globals);
+
+ var repFunc = function (wholeMatch, match, left, right) {
+ // encode html entities
+ var codeblock = left + showdown.subParser('encodeCode')(match, options, globals) + right;
+ return '\n\n¨G' + (globals.ghCodeBlocks.push({text: wholeMatch, codeblock: codeblock}) - 1) + 'G\n\n';
+ };
+
+ // Hash
', 'gim');
+
+ text = globals.converter._dispatch('hashPreCodeTags.after', text, options, globals);
+ return text;
+});
+
+showdown.subParser('headers', function (text, options, globals) {
+ 'use strict';
+
+ text = globals.converter._dispatch('headers.before', text, options, globals);
+
+ var headerLevelStart = (isNaN(parseInt(options.headerLevelStart))) ? 1 : parseInt(options.headerLevelStart),
+
+ // Set text-style headers:
+ // Header 1
+ // ========
+ //
+ // Header 2
+ // --------
+ //
+ setextRegexH1 = (options.smoothLivePreview) ? /^(.+)[ \t]*\n={2,}[ \t]*\n+/gm : /^(.+)[ \t]*\n=+[ \t]*\n+/gm,
+ setextRegexH2 = (options.smoothLivePreview) ? /^(.+)[ \t]*\n-{2,}[ \t]*\n+/gm : /^(.+)[ \t]*\n-+[ \t]*\n+/gm;
+
+ text = text.replace(setextRegexH1, function (wholeMatch, m1) {
+
+ var spanGamut = showdown.subParser('spanGamut')(m1, options, globals),
+ hID = (options.noHeaderId) ? '' : ' id="' + headerId(m1) + '"',
+ hLevel = headerLevelStart,
+ hashBlock = '
+ text = showdown.helper.replaceRecursiveRegExp(text, repFunc, '^ {0,3}\\s*
', options, globals);
+ text = text.replace(/^ {0,2}( ?-){3,}[ \t]*$/gm, key);
+ text = text.replace(/^ {0,2}( ?\*){3,}[ \t]*$/gm, key);
+ text = text.replace(/^ {0,2}( ?_){3,}[ \t]*$/gm, key);
+
+ text = globals.converter._dispatch('horizontalRule.after', text, options, globals);
+ return text;
+});
+
+/**
+ * Turn Markdown image shortcuts into tags.
+ */
+showdown.subParser('images', function (text, options, globals) {
+ 'use strict';
+
+ text = globals.converter._dispatch('images.before', text, options, globals);
+
+ var inlineRegExp = /!\[([^\]]*?)][ \t]*()\([ \t]??(?: =([*\d]+[A-Za-z%]{0,4})x([*\d]+[A-Za-z%]{0,4}))?[ \t]*(?:(["'])([^"]*?)\6)?[ \t]?\)/g,
+ crazyRegExp = /!\[([^\]]*?)][ \t]*()\([ \t]?<([^>]*)>(?: =([*\d]+[A-Za-z%]{0,4})x([*\d]+[A-Za-z%]{0,4}))?[ \t]*(?:(?:(["'])([^"]*?)\6))?[ \t]?\)/g,
+ base64RegExp = /!\[([^\]]*?)][ \t]*()\([ \t]??(?: =([*\d]+[A-Za-z%]{0,4})x([*\d]+[A-Za-z%]{0,4}))?[ \t]*(?:(["'])([^"]*?)\6)?[ \t]?\)/g,
+ referenceRegExp = /!\[([^\]]*?)] ?(?:\n *)?\[([\s\S]*?)]()()()()()/g,
+ refShortcutRegExp = /!\[([^\[\]]+)]()()()()()/g;
+
+ function writeImageTagBase64 (wholeMatch, altText, linkId, url, width, height, m5, title) {
+ url = url.replace(/\s/g, '');
+ return writeImageTag (wholeMatch, altText, linkId, url, width, height, m5, title);
+ }
+
+ function writeImageTag (wholeMatch, altText, linkId, url, width, height, m5, title) {
+
+ var gUrls = globals.gUrls,
+ gTitles = globals.gTitles,
+ gDims = globals.gDimensions;
+
+ linkId = linkId.toLowerCase();
+
+ if (!title) {
+ title = '';
+ }
+ // Special case for explicit empty url
+ if (wholeMatch.search(/\(? ?(['"].*['"])?\)$/m) > -1) {
+ url = '';
+
+ } else if (url === '' || url === null) {
+ if (linkId === '' || linkId === null) {
+ // lower-case and turn embedded newlines into spaces
+ linkId = altText.toLowerCase().replace(/ ?\n/g, ' ');
+ }
+ url = '#' + linkId;
+
+ if (!showdown.helper.isUndefined(gUrls[linkId])) {
+ url = gUrls[linkId];
+ if (!showdown.helper.isUndefined(gTitles[linkId])) {
+ title = gTitles[linkId];
+ }
+ if (!showdown.helper.isUndefined(gDims[linkId])) {
+ width = gDims[linkId].width;
+ height = gDims[linkId].height;
+ }
+ } else {
+ return wholeMatch;
+ }
+ }
+
+ altText = altText
+ .replace(/"/g, '"')
+ //altText = showdown.helper.escapeCharacters(altText, '*_', false);
+ .replace(showdown.helper.regexes.asteriskDashAndColon, showdown.helper.escapeCharactersCallback);
+ //url = showdown.helper.escapeCharacters(url, '*_', false);
+ url = url.replace(showdown.helper.regexes.asteriskDashAndColon, showdown.helper.escapeCharactersCallback);
+ var result = '
x
+ // So, to prevent it, we will put a marker (¨A)in the beginning of the line
+ // Kind of hackish/monkey patching, but seems more effective than overcomplicating the list parser
+ item = item.replace(/^([-*+]|\d\.)[ \t]+[\S\n ]*/g, function (wm2) {
+ return '¨A' + wm2;
+ });
+
+ // m1 - Leading line or
+ // Has a double return (multi paragraph) or
+ // Has sublist
+ if (m1 || (item.search(/\n{2,}/) > -1)) {
+ item = showdown.subParser('githubCodeBlocks')(item, options, globals);
+ item = showdown.subParser('blockGamut')(item, options, globals);
+ } else {
+ // Recursion for sub-lists:
+ item = showdown.subParser('lists')(item, options, globals);
+ item = item.replace(/\n$/, ''); // chomp(item)
+ item = showdown.subParser('hashHTMLBlocks')(item, options, globals);
+
+ // Colapse double linebreaks
+ item = item.replace(/\n\n+/g, '\n\n');
+ if (isParagraphed) {
+ item = showdown.subParser('paragraphs')(item, options, globals);
+ } else {
+ item = showdown.subParser('spanGamut')(item, options, globals);
+ }
+ }
+
+ // now we need to remove the marker (¨A)
+ item = item.replace('¨A', '');
+ // we can finally wrap the line in list item tags
+ item = '
\n');
+ }
+ } else {
+ // Vanilla hard breaks
+ text = text.replace(/ +\n/g, '
\n');
+ }
+
+ text = globals.converter._dispatch('spanGamut.after', text, options, globals);
+ return text;
+});
+
+showdown.subParser('strikethrough', function (text, options, globals) {
+ 'use strict';
+
+ function parseInside (txt) {
+ if (options.simplifiedAutoLink) {
+ txt = showdown.subParser('simplifiedAutoLinks')(txt, options, globals);
+ }
+ return '' + txt + '';
+ }
+
+ if (options.strikethrough) {
+ text = globals.converter._dispatch('strikethrough.before', text, options, globals);
+ text = text.replace(/(?:~){2}([\s\S]+?)(?:~){2}/g, function (wm, txt) { return parseInside(txt); });
+ text = globals.converter._dispatch('strikethrough.after', text, options, globals);
+ }
+
+ return text;
+});
+
+/**
+ * Strips link definitions from text, stores the URLs and titles in
+ * hash references.
+ * Link defs are in the form: ^[id]: url "optional title"
+ */
+showdown.subParser('stripLinkDefinitions', function (text, options, globals) {
+ 'use strict';
+
+ var regex = /^ {0,3}\[(.+)]:[ \t]*\n?[ \t]*\s]+)>?(?: =([*\d]+[A-Za-z%]{0,4})x([*\d]+[A-Za-z%]{0,4}))?[ \t]*\n?[ \t]*(?:(\n*)["|'(](.+?)["|')][ \t]*)?(?:\n+|(?=¨0))/gm,
+ base64Regex = /^ {0,3}\[(.+)]:[ \t]*\n?[ \t]*?(?: =([*\d]+[A-Za-z%]{0,4})x([*\d]+[A-Za-z%]{0,4}))?[ \t]*\n?[ \t]*(?:(\n*)["|'(](.+?)["|')][ \t]*)?(?:\n\n|(?=¨0)|(?=\n\[))/gm;
+
+ // attacklab: sentinel workarounds for lack of \A and \Z, safari\khtml bug
+ text += '¨0';
+
+ var replaceFunc = function (wholeMatch, linkId, url, width, height, blankLines, title) {
+ linkId = linkId.toLowerCase();
+ if (url.match(/^data:.+?\/.+?;base64,/)) {
+ // remove newlines
+ globals.gUrls[linkId] = url.replace(/\s/g, '');
+ } else {
+ globals.gUrls[linkId] = showdown.subParser('encodeAmpsAndAngles')(url, options, globals); // Link IDs are case-insensitive
+ }
+
+ if (blankLines) {
+ // Oops, found blank lines, so it's not a title.
+ // Put back the parenthetical statement we stole.
+ return blankLines + title;
+
+ } else {
+ if (title) {
+ globals.gTitles[linkId] = title.replace(/"|'/g, '"');
+ }
+ if (options.parseImgDimensions && width && height) {
+ globals.gDimensions[linkId] = {
+ width: width,
+ height: height
+ };
+ }
+ }
+ // Completely remove the definition from the text
+ return '';
+ };
+
+ // first we try to find base64 link references
+ text = text.replace(base64Regex, replaceFunc);
+
+ text = text.replace(regex, replaceFunc);
+
+ // attacklab: strip sentinel
+ text = text.replace(/¨0/, '');
+
+ return text;
+});
+
+showdown.subParser('tables', function (text, options, globals) {
+ 'use strict';
+
+ if (!options.tables) {
+ return text;
+ }
+
+ var tableRgx = /^ {0,3}\|?.+\|.+\n {0,3}\|?[ \t]*:?[ \t]*(?:[-=]){2,}[ \t]*:?[ \t]*\|[ \t]*:?[ \t]*(?:[-=]){2,}[\s\S]+?(?:\n\n|¨0)/gm,
+ //singeColTblRgx = /^ {0,3}\|.+\|\n {0,3}\|[ \t]*:?[ \t]*(?:[-=]){2,}[ \t]*:?[ \t]*\|[ \t]*\n(?: {0,3}\|.+\|\n)+(?:\n\n|¨0)/gm;
+ singeColTblRgx = /^ {0,3}\|.+\|[ \t]*\n {0,3}\|[ \t]*:?[ \t]*(?:[-=]){2,}[ \t]*:?[ \t]*\|[ \t]*\n( {0,3}\|.+\|[ \t]*\n)*(?:\n|¨0)/gm;
+
+ function parseStyles (sLine) {
+ if (/^:[ \t]*--*$/.test(sLine)) {
+ return ' style="text-align:left;"';
+ } else if (/^--*[ \t]*:[ \t]*$/.test(sLine)) {
+ return ' style="text-align:right;"';
+ } else if (/^:[ \t]*--*[ \t]*:$/.test(sLine)) {
+ return ' style="text-align:center;"';
+ } else {
+ return '';
+ }
+ }
+
+ function parseHeaders (header, style) {
+ var id = '';
+ header = header.trim();
+ // support both tablesHeaderId and tableHeaderId due to error in documentation so we don't break backwards compatibility
+ if (options.tablesHeaderId || options.tableHeaderId) {
+ id = ' id="' + header.replace(/ /g, '_').toLowerCase() + '"';
+ }
+ header = showdown.subParser('spanGamut')(header, options, globals);
+
+ return '\n\n
\n';
+ return tb;
+ }
+
+ function parseTable (rawTable) {
+ var i, tableLines = rawTable.split('\n');
+
+ for (i = 0; i < tableLines.length; ++i) {
+ // strip wrong first and last column if wrapped tables are used
+ if (/^ {0,3}\|/.test(tableLines[i])) {
+ tableLines[i] = tableLines[i].replace(/^ {0,3}\|/, '');
+ }
+ if (/\|[ \t]*$/.test(tableLines[i])) {
+ tableLines[i] = tableLines[i].replace(/\|[ \t]*$/, '');
+ }
+ // parse code spans first, but we only support one line code spans
+ tableLines[i] = showdown.subParser('codeSpans')(tableLines[i], options, globals);
+ }
+
+ var rawHeaders = tableLines[0].split('|').map(function (s) { return s.trim();}),
+ rawStyles = tableLines[1].split('|').map(function (s) { return s.trim();}),
+ rawCells = [],
+ headers = [],
+ styles = [],
+ cells = [];
+
+ tableLines.shift();
+ tableLines.shift();
+
+ for (i = 0; i < tableLines.length; ++i) {
+ if (tableLines[i].trim() === '') {
+ continue;
+ }
+ rawCells.push(
+ tableLines[i]
+ .split('|')
+ .map(function (s) {
+ return s.trim();
+ })
+ );
+ }
+
+ if (rawHeaders.length < rawStyles.length) {
+ return rawTable;
+ }
+
+ for (i = 0; i < rawStyles.length; ++i) {
+ styles.push(parseStyles(rawStyles[i]));
+ }
+
+ for (i = 0; i < rawHeaders.length; ++i) {
+ if (showdown.helper.isUndefined(styles[i])) {
+ styles[i] = '';
+ }
+ headers.push(parseHeaders(rawHeaders[i], styles[i]));
+ }
+
+ for (i = 0; i < rawCells.length; ++i) {
+ var row = [];
+ for (var ii = 0; ii < headers.length; ++ii) {
+ if (showdown.helper.isUndefined(rawCells[i][ii])) {
+
+ }
+ row.push(parseCells(rawCells[i][ii], styles[ii]));
+ }
+ cells.push(row);
+ }
+
+ return buildTable(headers, cells);
+ }
+
+ text = globals.converter._dispatch('tables.before', text, options, globals);
+
+ // find escaped pipe characters
+ text = text.replace(/\\(\|)/g, showdown.helper.escapeCharactersCallback);
+
+ // parse multi column tables
+ text = text.replace(tableRgx, parseTable);
+
+ // parse one column tables
+ text = text.replace(singeColTblRgx, parseTable);
+
+ text = globals.converter._dispatch('tables.after', text, options, globals);
+
+ return text;
+});
+
+showdown.subParser('underline', function (text, options, globals) {
+ 'use strict';
+
+ if (!options.underline) {
+ return text;
+ }
+
+ text = globals.converter._dispatch('underline.before', text, options, globals);
+
+ if (options.literalMidWordUnderscores) {
+ text = text.replace(/\b___(\S[\s\S]*?)___\b/g, function (wm, txt) {
+ return '' + txt + '';
+ });
+ text = text.replace(/\b__(\S[\s\S]*?)__\b/g, function (wm, txt) {
+ return '' + txt + '';
+ });
+ } else {
+ text = text.replace(/___(\S[\s\S]*?)___/g, function (wm, m) {
+ return (/\S$/.test(m)) ? '' + m + '' : wm;
+ });
+ text = text.replace(/__(\S[\s\S]*?)__/g, function (wm, m) {
+ return (/\S$/.test(m)) ? '' + m + '' : wm;
+ });
+ }
+
+ // escape remaining underscores to prevent them being parsed by italic and bold
+ text = text.replace(/(_)/g, showdown.helper.escapeCharactersCallback);
+
+ text = globals.converter._dispatch('underline.after', text, options, globals);
+
+ return text;
+});
+
+/**
+ * Swap back in all the special characters we've hidden.
+ */
+showdown.subParser('unescapeSpecialChars', function (text, options, globals) {
+ 'use strict';
+ text = globals.converter._dispatch('unescapeSpecialChars.before', text, options, globals);
+
+ text = text.replace(/¨E(\d+)E/g, function (wholeMatch, m1) {
+ var charCodeToReplace = parseInt(m1);
+ return String.fromCharCode(charCodeToReplace);
+ });
+
+ text = globals.converter._dispatch('unescapeSpecialChars.after', text, options, globals);
+ return text;
+});
+
+showdown.subParser('makeMarkdown.blockquote', function (node, globals) {
+ 'use strict';
+
+ var txt = '';
+ if (node.hasChildNodes()) {
+ var children = node.childNodes,
+ childrenLength = children.length;
+
+ for (var i = 0; i < childrenLength; ++i) {
+ var innerTxt = showdown.subParser('makeMarkdown.node')(children[i], globals);
+
+ if (innerTxt === '') {
+ continue;
+ }
+ txt += innerTxt;
+ }
+ }
+ // cleanup
+ txt = txt.trim();
+ txt = '> ' + txt.split('\n').join('\n> ');
+ return txt;
+});
+
+showdown.subParser('makeMarkdown.codeBlock', function (node, globals) {
+ 'use strict';
+
+ var lang = node.getAttribute('language'),
+ num = node.getAttribute('precodenum');
+ return '```' + lang + '\n' + globals.preList[num] + '\n```';
+});
+
+showdown.subParser('makeMarkdown.codeSpan', function (node) {
+ 'use strict';
+
+ return '`' + node.innerHTML + '`';
+});
+
+showdown.subParser('makeMarkdown.emphasis', function (node, globals) {
+ 'use strict';
+
+ var txt = '';
+ if (node.hasChildNodes()) {
+ txt += '*';
+ var children = node.childNodes,
+ childrenLength = children.length;
+ for (var i = 0; i < childrenLength; ++i) {
+ txt += showdown.subParser('makeMarkdown.node')(children[i], globals);
+ }
+ txt += '*';
+ }
+ return txt;
+});
+
+showdown.subParser('makeMarkdown.header', function (node, globals, headerLevel) {
+ 'use strict';
+
+ var headerMark = new Array(headerLevel + 1).join('#'),
+ txt = '';
+
+ if (node.hasChildNodes()) {
+ txt = headerMark + ' ';
+ var children = node.childNodes,
+ childrenLength = children.length;
+
+ for (var i = 0; i < childrenLength; ++i) {
+ txt += showdown.subParser('makeMarkdown.node')(children[i], globals);
+ }
+ }
+ return txt;
+});
+
+showdown.subParser('makeMarkdown.hr', function () {
+ 'use strict';
+
+ return '---';
+});
+
+showdown.subParser('makeMarkdown.image', function (node) {
+ 'use strict';
+
+ var txt = '';
+ if (node.hasAttribute('src')) {
+ txt += ' + '>';
+ if (node.hasAttribute('width') && node.hasAttribute('height')) {
+ txt += ' =' + node.getAttribute('width') + 'x' + node.getAttribute('height');
+ }
+
+ if (node.hasAttribute('title')) {
+ txt += ' "' + node.getAttribute('title') + '"';
+ }
+ txt += ')';
+ }
+ return txt;
+});
+
+showdown.subParser('makeMarkdown.links', function (node, globals) {
+ 'use strict';
+
+ var txt = '';
+ if (node.hasChildNodes() && node.hasAttribute('href')) {
+ var children = node.childNodes,
+ childrenLength = children.length;
+ txt = '[';
+ for (var i = 0; i < childrenLength; ++i) {
+ txt += showdown.subParser('makeMarkdown.node')(children[i], globals);
+ }
+ txt += '](';
+ txt += '<' + node.getAttribute('href') + '>';
+ if (node.hasAttribute('title')) {
+ txt += ' "' + node.getAttribute('title') + '"';
+ }
+ txt += ')';
+ }
+ return txt;
+});
+
+showdown.subParser('makeMarkdown.list', function (node, globals, type) {
+ 'use strict';
+
+ var txt = '';
+ if (!node.hasChildNodes()) {
+ return '';
+ }
+ var listItems = node.childNodes,
+ listItemsLenght = listItems.length,
+ listNum = node.getAttribute('start') || 1;
+
+ for (var i = 0; i < listItemsLenght; ++i) {
+ if (typeof listItems[i].tagName === 'undefined' || listItems[i].tagName.toLowerCase() !== 'li') {
+ continue;
+ }
+
+ // define the bullet to use in list
+ var bullet = '';
+ if (type === 'ol') {
+ bullet = listNum.toString() + '. ';
+ } else {
+ bullet = '- ';
+ }
+
+ // parse list item
+ txt += bullet + showdown.subParser('makeMarkdown.listItem')(listItems[i], globals);
+ ++listNum;
+ }
+
+ // add comment at the end to prevent consecutive lists to be parsed as one
+ txt += '\n\n';
+ return txt.trim();
+});
+
+showdown.subParser('makeMarkdown.listItem', function (node, globals) {
+ 'use strict';
+
+ var listItemTxt = '';
+
+ var children = node.childNodes,
+ childrenLenght = children.length;
+
+ for (var i = 0; i < childrenLenght; ++i) {
+ listItemTxt += showdown.subParser('makeMarkdown.node')(children[i], globals);
+ }
+ // if it's only one liner, we need to add a newline at the end
+ if (!/\n$/.test(listItemTxt)) {
+ listItemTxt += '\n';
+ } else {
+ // it's multiparagraph, so we need to indent
+ listItemTxt = listItemTxt
+ .split('\n')
+ .join('\n ')
+ .replace(/^ {4}$/gm, '')
+ .replace(/\n\n+/g, '\n\n');
+ }
+
+ return listItemTxt;
+});
+
+
+
+showdown.subParser('makeMarkdown.node', function (node, globals, spansOnly) {
+ 'use strict';
+
+ spansOnly = spansOnly || false;
+
+ var txt = '';
+
+ // edge case of text without wrapper paragraph
+ if (node.nodeType === 3) {
+ return showdown.subParser('makeMarkdown.txt')(node, globals);
+ }
+
+ // HTML comment
+ if (node.nodeType === 8) {
+ return '\n\n';
+ }
+
+ // process only node elements
+ if (node.nodeType !== 1) {
+ return '';
+ }
+
+ var tagName = node.tagName.toLowerCase();
+
+ switch (tagName) {
+
+ //
+ // BLOCKS
+ //
+ case 'h1':
+ if (!spansOnly) { txt = showdown.subParser('makeMarkdown.header')(node, globals, 1) + '\n\n'; }
+ break;
+ case 'h2':
+ if (!spansOnly) { txt = showdown.subParser('makeMarkdown.header')(node, globals, 2) + '\n\n'; }
+ break;
+ case 'h3':
+ if (!spansOnly) { txt = showdown.subParser('makeMarkdown.header')(node, globals, 3) + '\n\n'; }
+ break;
+ case 'h4':
+ if (!spansOnly) { txt = showdown.subParser('makeMarkdown.header')(node, globals, 4) + '\n\n'; }
+ break;
+ case 'h5':
+ if (!spansOnly) { txt = showdown.subParser('makeMarkdown.header')(node, globals, 5) + '\n\n'; }
+ break;
+ case 'h6':
+ if (!spansOnly) { txt = showdown.subParser('makeMarkdown.header')(node, globals, 6) + '\n\n'; }
+ break;
+
+ case 'p':
+ if (!spansOnly) { txt = showdown.subParser('makeMarkdown.paragraph')(node, globals) + '\n\n'; }
+ break;
+
+ case 'blockquote':
+ if (!spansOnly) { txt = showdown.subParser('makeMarkdown.blockquote')(node, globals) + '\n\n'; }
+ break;
+
+ case 'hr':
+ if (!spansOnly) { txt = showdown.subParser('makeMarkdown.hr')(node, globals) + '\n\n'; }
+ break;
+
+ case 'ol':
+ if (!spansOnly) { txt = showdown.subParser('makeMarkdown.list')(node, globals, 'ol') + '\n\n'; }
+ break;
+
+ case 'ul':
+ if (!spansOnly) { txt = showdown.subParser('makeMarkdown.list')(node, globals, 'ul') + '\n\n'; }
+ break;
+
+ case 'precode':
+ if (!spansOnly) { txt = showdown.subParser('makeMarkdown.codeBlock')(node, globals) + '\n\n'; }
+ break;
+
+ case 'pre':
+ if (!spansOnly) { txt = showdown.subParser('makeMarkdown.pre')(node, globals) + '\n\n'; }
+ break;
+
+ case 'table':
+ if (!spansOnly) { txt = showdown.subParser('makeMarkdown.table')(node, globals) + '\n\n'; }
+ break;
+
+ //
+ // SPANS
+ //
+ case 'code':
+ txt = showdown.subParser('makeMarkdown.codeSpan')(node, globals);
+ break;
+
+ case 'em':
+ case 'i':
+ txt = showdown.subParser('makeMarkdown.emphasis')(node, globals);
+ break;
+
+ case 'strong':
+ case 'b':
+ txt = showdown.subParser('makeMarkdown.strong')(node, globals);
+ break;
+
+ case 'del':
+ txt = showdown.subParser('makeMarkdown.strikethrough')(node, globals);
+ break;
+
+ case 'a':
+ txt = showdown.subParser('makeMarkdown.links')(node, globals);
+ break;
+
+ case 'img':
+ txt = showdown.subParser('makeMarkdown.image')(node, globals);
+ break;
+
+ default:
+ txt = node.outerHTML + '\n\n';
+ }
+
+ // common normalization
+ // TODO eventually
+
+ return txt;
+});
+
+showdown.subParser('makeMarkdown.paragraph', function (node, globals) {
+ 'use strict';
+
+ var txt = '';
+ if (node.hasChildNodes()) {
+ var children = node.childNodes,
+ childrenLength = children.length;
+ for (var i = 0; i < childrenLength; ++i) {
+ txt += showdown.subParser('makeMarkdown.node')(children[i], globals);
+ }
+ }
+
+ // some text normalization
+ txt = txt.trim();
+
+ return txt;
+});
+
+showdown.subParser('makeMarkdown.pre', function (node, globals) {
+ 'use strict';
+
+ var num = node.getAttribute('prenum');
+ return '\n',
+ tblLgn = headers.length;
+
+ for (var i = 0; i < tblLgn; ++i) {
+ tb += headers[i];
+ }
+ tb += ' \n\n\n';
+
+ for (i = 0; i < cells.length; ++i) {
+ tb += '\n';
+ for (var ii = 0; ii < tblLgn; ++ii) {
+ tb += cells[i][ii];
+ }
+ tb += ' \n';
+ }
+ tb += '\n' + globals.preList[num] + '
';
+});
+
+showdown.subParser('makeMarkdown.strikethrough', function (node, globals) {
+ 'use strict';
+
+ var txt = '';
+ if (node.hasChildNodes()) {
+ txt += '~~';
+ var children = node.childNodes,
+ childrenLength = children.length;
+ for (var i = 0; i < childrenLength; ++i) {
+ txt += showdown.subParser('makeMarkdown.node')(children[i], globals);
+ }
+ txt += '~~';
+ }
+ return txt;
+});
+
+showdown.subParser('makeMarkdown.strong', function (node, globals) {
+ 'use strict';
+
+ var txt = '';
+ if (node.hasChildNodes()) {
+ txt += '**';
+ var children = node.childNodes,
+ childrenLength = children.length;
+ for (var i = 0; i < childrenLength; ++i) {
+ txt += showdown.subParser('makeMarkdown.node')(children[i], globals);
+ }
+ txt += '**';
+ }
+ return txt;
+});
+
+showdown.subParser('makeMarkdown.table', function (node, globals) {
+ 'use strict';
+
+ var txt = '',
+ tableArray = [[], []],
+ headings = node.querySelectorAll('thead>tr>th'),
+ rows = node.querySelectorAll('tbody>tr'),
+ i, ii;
+ for (i = 0; i < headings.length; ++i) {
+ var headContent = showdown.subParser('makeMarkdown.tableCell')(headings[i], globals),
+ allign = '---';
+
+ if (headings[i].hasAttribute('style')) {
+ var style = headings[i].getAttribute('style').toLowerCase().replace(/\s/g, '');
+ switch (style) {
+ case 'text-align:left;':
+ allign = ':---';
+ break;
+ case 'text-align:right;':
+ allign = '---:';
+ break;
+ case 'text-align:center;':
+ allign = ':---:';
+ break;
+ }
+ }
+ tableArray[0][i] = headContent.trim();
+ tableArray[1][i] = allign;
+ }
+
+ for (i = 0; i < rows.length; ++i) {
+ var r = tableArray.push([]) - 1,
+ cols = rows[i].getElementsByTagName('td');
+
+ for (ii = 0; ii < headings.length; ++ii) {
+ var cellContent = ' ';
+ if (typeof cols[ii] !== 'undefined') {
+ cellContent = showdown.subParser('makeMarkdown.tableCell')(cols[ii], globals);
+ }
+ tableArray[r].push(cellContent);
+ }
+ }
+
+ var cellSpacesCount = 3;
+ for (i = 0; i < tableArray.length; ++i) {
+ for (ii = 0; ii < tableArray[i].length; ++ii) {
+ var strLen = tableArray[i][ii].length;
+ if (strLen > cellSpacesCount) {
+ cellSpacesCount = strLen;
+ }
+ }
+ }
+
+ for (i = 0; i < tableArray.length; ++i) {
+ for (ii = 0; ii < tableArray[i].length; ++ii) {
+ if (i === 1) {
+ if (tableArray[i][ii].slice(-1) === ':') {
+ tableArray[i][ii] = showdown.helper.padEnd(tableArray[i][ii].slice(-1), cellSpacesCount - 1, '-') + ':';
+ } else {
+ tableArray[i][ii] = showdown.helper.padEnd(tableArray[i][ii], cellSpacesCount, '-');
+ }
+ } else {
+ tableArray[i][ii] = showdown.helper.padEnd(tableArray[i][ii], cellSpacesCount);
+ }
+ }
+ txt += '| ' + tableArray[i].join(' | ') + ' |\n';
+ }
+
+ return txt.trim();
+});
+
+showdown.subParser('makeMarkdown.tableCell', function (node, globals) {
+ 'use strict';
+
+ var txt = '';
+ if (!node.hasChildNodes()) {
+ return '';
+ }
+ var children = node.childNodes,
+ childrenLength = children.length;
+
+ for (var i = 0; i < childrenLength; ++i) {
+ txt += showdown.subParser('makeMarkdown.node')(children[i], globals, true);
+ }
+ return txt.trim();
+});
+
+showdown.subParser('makeMarkdown.txt', function (node) {
+ 'use strict';
+
+ var txt = node.nodeValue;
+
+ // multiple spaces are collapsed
+ txt = txt.replace(/ +/g, ' ');
+
+ // replace the custom ¨NBSP; with a space
+ txt = txt.replace(/¨NBSP;/g, ' ');
+
+ // ", <, > and & should replace escaped html entities
+ txt = showdown.helper.unescapeHTMLEntities(txt);
+
+ // escape markdown magic characters
+ // emphasis, strong and strikethrough - can appear everywhere
+ // we also escape pipe (|) because of tables
+ // and escape ` because of code blocks and spans
+ txt = txt.replace(/([*_~|`])/g, '\\$1');
+
+ // escape > because of blockquotes
+ txt = txt.replace(/^(\s*)>/g, '\\$1>');
+
+ // hash character, only troublesome at the beginning of a line because of headers
+ txt = txt.replace(/^#/gm, '\\#');
+
+ // horizontal rules
+ txt = txt.replace(/^(\s*)([-=]{3,})(\s*)$/, '$1\\$2$3');
+
+ // dot, because of ordered lists, only troublesome at the beginning of a line when preceded by an integer
+ txt = txt.replace(/^( {0,3}\d+)\./gm, '$1\\.');
+
+ // +, * and -, at the beginning of a line becomes a list, so we need to escape them also (asterisk was already escaped)
+ txt = txt.replace(/^( {0,3})([+-])/gm, '$1\\$2');
+
+ // images and links, ] followed by ( is problematic, so we escape it
+ txt = txt.replace(/]([\s]*)\(/g, '\\]$1\\(');
+
+ // reference URIs must also be escaped
+ txt = txt.replace(/^ {0,3}\[([\S \t]*?)]:/gm, '\\[$1]:');
+
+ return txt;
+});
+
+var root = this;
+
+// AMD Loader
+if (typeof define === 'function' && define.amd) {
+ define(function () {
+ 'use strict';
+ return showdown;
+ });
+
+// CommonJS/nodeJS Loader
+} else if (typeof module !== 'undefined' && module.exports) {
+ module.exports = showdown;
+
+// Regular Browser loader
+} else {
+ root.showdown = showdown;
+}
+}).call(this);
+
+//# sourceMappingURL=showdown.js.map
diff --git a/octoprint_octolapse/static/js/webcams/mjpg_streamer/raspi_cam_v2.js b/octoprint_octolapse/static/js/webcams/mjpg_streamer/raspi_cam_v2.js
index 1c6d69af..061d47d7 100644
--- a/octoprint_octolapse/static/js/webcams/mjpg_streamer/raspi_cam_v2.js
+++ b/octoprint_octolapse/static/js/webcams/mjpg_streamer/raspi_cam_v2.js
@@ -1,7 +1,7 @@
/*
##################################################################################
# Octolapse - A plugin for OctoPrint used for making stabilized timelapse videos.
-# Copyright (C) 2019 Brad Hochgesang
+# Copyright (C) 2023 Brad Hochgesang
##################################################################################
# This program is free software: you can redistribute it and/or modify
# it under the terms of the GNU Affero General Public License as published
diff --git a/octoprint_octolapse/templates/octolapse_dialog.jinja2 b/octoprint_octolapse/templates/octolapse_dialog.jinja2
new file mode 100644
index 00000000..be4c4c75
--- /dev/null
+++ b/octoprint_octolapse/templates/octolapse_dialog.jinja2
@@ -0,0 +1,66 @@
+
+
diff --git a/octoprint_octolapse/templates/octolapse_dialog_rendering_in_process.jinja2 b/octoprint_octolapse/templates/octolapse_dialog_rendering_in_process.jinja2
new file mode 100644
index 00000000..6daee418
--- /dev/null
+++ b/octoprint_octolapse/templates/octolapse_dialog_rendering_in_process.jinja2
@@ -0,0 +1,59 @@
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/octoprint_octolapse/templates/octolapse_dialog_rendering_unfinished.jinja2 b/octoprint_octolapse/templates/octolapse_dialog_rendering_unfinished.jinja2
new file mode 100644
index 00000000..da597278
--- /dev/null
+++ b/octoprint_octolapse/templates/octolapse_dialog_rendering_unfinished.jinja2
@@ -0,0 +1,96 @@
+
+
+
+
+
+
+
+
diff --git a/octoprint_octolapse/templates/octolapse_dialog_timelapse_files.jinja2 b/octoprint_octolapse/templates/octolapse_dialog_timelapse_files.jinja2
new file mode 100644
index 00000000..dd729999
--- /dev/null
+++ b/octoprint_octolapse/templates/octolapse_dialog_timelapse_files.jinja2
@@ -0,0 +1,91 @@
+
+
+
+
+
+
+
+{% include "octolapse_file_browser.jinja2" %}
+
diff --git a/octoprint_octolapse/templates/octolapse_file_browser.jinja2 b/octoprint_octolapse/templates/octolapse_file_browser.jinja2
new file mode 100644
index 00000000..4a61359b
--- /dev/null
+++ b/octoprint_octolapse/templates/octolapse_file_browser.jinja2
@@ -0,0 +1,101 @@
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/octoprint_octolapse/templates/octolapse_helpers.jinja2 b/octoprint_octolapse/templates/octolapse_helpers.jinja2
new file mode 100644
index 00000000..3d4856b2
--- /dev/null
+++ b/octoprint_octolapse/templates/octolapse_helpers.jinja2
@@ -0,0 +1,241 @@
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/octoprint_octolapse/templates/octolapse_navbar.jinja2 b/octoprint_octolapse/templates/octolapse_navbar.jinja2
index d7a1c8a6..e064d61d 100644
--- a/octoprint_octolapse/templates/octolapse_navbar.jinja2
+++ b/octoprint_octolapse/templates/octolapse_navbar.jinja2
@@ -1,7 +1,7 @@
-
-
|
@@ -84,7 +83,7 @@
-
+
+
+
+
diff --git a/octoprint_octolapse/templates/octolapse_profiles_camera.jinja2 b/octoprint_octolapse/templates/octolapse_profiles_camera.jinja2
index 3253f32e..32c3b073 100644
--- a/octoprint_octolapse/templates/octolapse_profiles_camera.jinja2
+++ b/octoprint_octolapse/templates/octolapse_profiles_camera.jinja2
@@ -1,7 +1,7 @@
+
+
+
+
+
+ If required, enter a password to be sent with the camera snapshot request. Attention Be sure you are using HTTPS when setting a password and that your camera URL is secure to keep your password secure!
+
+
+
@@ -149,36 +244,43 @@
-
+
MS
-
-
- Applied before taking a snapshot. Use higher values if you encounter motion blur, but consider changing to manual focus/manual exposure/manual white balance in the Image Preferences below. This can reduce the required delay substantially. The optimal value = 1000/FPS. Example for 30FPS: 1000/30FPS = 33.3
+
+
+ This value should be as low as possible (ideally 0). See the help file for more details.
-
+
@@ -246,7 +406,7 @@
@@ -187,54 +289,112 @@
-
+ Custom Camera Scripts
+
Gcode Scripts
+
+
+
+
-
@@ -255,9 +415,9 @@
-
- {% include "octolapse_status_triggers.jinja2" %}
- {% include "octolapse_status_extruder.jinja2" %}
- {% include "octolapse_status_position.jinja2" %}
- {% include "octolapse_status_printer_state.jinja2" %}
- {% include "octolapse_status_snapshot_plan.jinja2" %}
- {% include "octolapse_tab_latest_snapshot.jinja2" %}
- {% include "octolapse_tab_settings_current.jinja2" %}
- {% include "octolapse_tab_webcam_settings_popup.jinja2" %}
- {% include "octolapse_tab_snapshot_plan_preview_popup.jinja2" %}
-
-
+{% include "octolapse_status_triggers.jinja2" %}
+{% include "octolapse_status_extruder.jinja2" %}
+{% include "octolapse_status_position.jinja2" %}
+{% include "octolapse_status_printer_state.jinja2" %}
+{% include "octolapse_status_snapshot_plan.jinja2" %}
+{% include "octolapse_snapshot_plan.jinja2" %}
+{% include "octolapse_tab_latest_snapshot.jinja2" %}
+{% include "octolapse_tab_settings_current.jinja2" %}
+{% include "octolapse_tab_webcam_settings_popup.jinja2" %}
+{% include "octolapse_tab_snapshot_plan_preview_popup.jinja2" %}
+{% include "octolapse_dialog_rendering_unfinished.jinja2" %}
+{% include "octolapse_dialog_rendering_in_process.jinja2" %}
+{% include "octolapse_dialog_timelapse_files.jinja2" %}
+{% include "octolapse_dialog.jinja2" %}
+{% include "octolapse_helpers.jinja2" %}
diff --git a/octoprint_octolapse/templates/octolapse_tab_latest_snapshot.jinja2 b/octoprint_octolapse/templates/octolapse_tab_latest_snapshot.jinja2
index eb4baa1f..09fbb724 100644
--- a/octoprint_octolapse/templates/octolapse_tab_latest_snapshot.jinja2
+++ b/octoprint_octolapse/templates/octolapse_tab_latest_snapshot.jinja2
@@ -1,7 +1,7 @@
diff --git a/octoprint_octolapse/templates/octolapse_tab_settings_current.jinja2 b/octoprint_octolapse/templates/octolapse_tab_settings_current.jinja2
index 38eeb055..56faf6da 100644
--- a/octoprint_octolapse/templates/octolapse_tab_settings_current.jinja2
+++ b/octoprint_octolapse/templates/octolapse_tab_settings_current.jinja2
@@ -1,7 +1,7 @@
diff --git a/octoprint_octolapse/templates/octolapse_tab_settings_current_cameras.jinja2 b/octoprint_octolapse/templates/octolapse_tab_settings_current_cameras.jinja2
index 9ef6c9a0..1b4ab92c 100644
--- a/octoprint_octolapse/templates/octolapse_tab_settings_current_cameras.jinja2
+++ b/octoprint_octolapse/templates/octolapse_tab_settings_current_cameras.jinja2
@@ -1,36 +1,66 @@
-
+
diff --git a/octoprint_octolapse/templates/octolapse_tab_snapshot_plan_preview_popup.jinja2 b/octoprint_octolapse/templates/octolapse_tab_snapshot_plan_preview_popup.jinja2
index 4c000b80..e40356a3 100644
--- a/octoprint_octolapse/templates/octolapse_tab_snapshot_plan_preview_popup.jinja2
+++ b/octoprint_octolapse/templates/octolapse_tab_snapshot_plan_preview_popup.jinja2
@@ -1,7 +1,7 @@
diff --git a/octoprint_octolapse/templates/webcams/mjpg_streamer/logitech_c920.jinja2 b/octoprint_octolapse/templates/webcams/mjpg_streamer/logitech_c920.jinja2
index 4c4b9f88..fa401101 100644
--- a/octoprint_octolapse/templates/webcams/mjpg_streamer/logitech_c920.jinja2
+++ b/octoprint_octolapse/templates/webcams/mjpg_streamer/logitech_c920.jinja2
@@ -11,34 +11,34 @@
Enable webcam image adjustments. Currently this only works with mjpg-streamer.
@@ -265,92 +425,50 @@
-
-
-
-
-
+
{% include "octolapse_profiles_camera_webcam.jinja2" %}
diff --git a/octoprint_octolapse/templates/octolapse_profiles_camera_webcam.jinja2 b/octoprint_octolapse/templates/octolapse_profiles_camera_webcam.jinja2
index b041e02d..8e6e25ca 100644
--- a/octoprint_octolapse/templates/octolapse_profiles_camera_webcam.jinja2
+++ b/octoprint_octolapse/templates/octolapse_profiles_camera_webcam.jinja2
@@ -1,7 +1,7 @@
-{% include "/webcams/mjpg_streamer/logitech_c920.jinja2" %}
-{% include "/webcams/mjpg_streamer/raspi_cam_v2.jinja2" %}
+{% include "plugin_octolapse/webcams/mjpg_streamer/logitech_c920.jinja2" %}
+{% include "plugin_octolapse/webcams/mjpg_streamer/raspi_cam_v2.jinja2" %}
+{% include "plugin_octolapse/webcams/mjpg_streamer/logitech_c250.jinja2" %}
diff --git a/octoprint_octolapse/templates/octolapse_profiles_library.jinja2 b/octoprint_octolapse/templates/octolapse_profiles_library.jinja2
index 879e015a..a6fcc134 100644
--- a/octoprint_octolapse/templates/octolapse_profiles_library.jinja2
+++ b/octoprint_octolapse/templates/octolapse_profiles_library.jinja2
@@ -1,3 +1,26 @@
+
diff --git a/octoprint_octolapse/templates/octolapse_profiles_debug.jinja2 b/octoprint_octolapse/templates/octolapse_profiles_logging.jinja2
similarity index 62%
rename from octoprint_octolapse/templates/octolapse_profiles_debug.jinja2
rename to octoprint_octolapse/templates/octolapse_profiles_logging.jinja2
index 67992a28..d30a006b 100644
--- a/octoprint_octolapse/templates/octolapse_profiles_debug.jinja2
+++ b/octoprint_octolapse/templates/octolapse_profiles_logging.jinja2
@@ -1,7 +1,7 @@
-
diff --git a/octoprint_octolapse/templates/octolapse_profiles_printer.jinja2 b/octoprint_octolapse/templates/octolapse_profiles_printer.jinja2
index 3a58fb6b..c2d44efe 100644
--- a/octoprint_octolapse/templates/octolapse_profiles_printer.jinja2
+++ b/octoprint_octolapse/templates/octolapse_profiles_printer.jinja2
@@ -1,7 +1,7 @@
-
{% include "octolapse_profiles_printer_slicer_other.jinja2" %}
{% include "octolapse_profiles_printer_slicer_slic3r_pe.jinja2" %}
diff --git a/octoprint_octolapse/templates/octolapse_profiles_printer_automatic.jinja2 b/octoprint_octolapse/templates/octolapse_profiles_printer_automatic.jinja2
index 6a81ae23..eaa9960d 100644
--- a/octoprint_octolapse/templates/octolapse_profiles_printer_automatic.jinja2
+++ b/octoprint_octolapse/templates/octolapse_profiles_printer_automatic.jinja2
@@ -1,3 +1,26 @@
+
diff --git a/octoprint_octolapse/templates/octolapse_profiles_printer_slicer_cura.jinja2 b/octoprint_octolapse/templates/octolapse_profiles_printer_slicer_cura.jinja2
index b4f7e87d..c33be5fb 100644
--- a/octoprint_octolapse/templates/octolapse_profiles_printer_slicer_cura.jinja2
+++ b/octoprint_octolapse/templates/octolapse_profiles_printer_slicer_cura.jinja2
@@ -1,173 +1,230 @@
-
diff --git a/octoprint_octolapse/templates/octolapse_profiles_printer_slicer_simplify3d.jinja2 b/octoprint_octolapse/templates/octolapse_profiles_printer_slicer_simplify3d.jinja2
index 0eb18c43..6c224f07 100644
--- a/octoprint_octolapse/templates/octolapse_profiles_printer_slicer_simplify3d.jinja2
+++ b/octoprint_octolapse/templates/octolapse_profiles_printer_slicer_simplify3d.jinja2
@@ -1,128 +1,188 @@
-
diff --git a/octoprint_octolapse/templates/octolapse_profiles_stabilization.jinja2 b/octoprint_octolapse/templates/octolapse_profiles_stabilization.jinja2
index 8fba27e0..83f660a9 100644
--- a/octoprint_octolapse/templates/octolapse_profiles_stabilization.jinja2
+++ b/octoprint_octolapse/templates/octolapse_profiles_stabilization.jinja2
@@ -1,7 +1,7 @@
+
+
diff --git a/octoprint_octolapse/templates/octolapse_snapshot_plan.jinja2 b/octoprint_octolapse/templates/octolapse_snapshot_plan.jinja2
new file mode 100644
index 00000000..9fbc684f
--- /dev/null
+++ b/octoprint_octolapse/templates/octolapse_snapshot_plan.jinja2
@@ -0,0 +1,149 @@
+
+
+
diff --git a/octoprint_octolapse/templates/octolapse_status_extruder.jinja2 b/octoprint_octolapse/templates/octolapse_status_extruder.jinja2
index 3b5b3ebb..97c89adc 100644
--- a/octoprint_octolapse/templates/octolapse_status_extruder.jinja2
+++ b/octoprint_octolapse/templates/octolapse_status_extruder.jinja2
@@ -1,7 +1,7 @@
-
diff --git a/octoprint_octolapse/templates/octolapse_status_triggers.jinja2 b/octoprint_octolapse/templates/octolapse_status_triggers.jinja2
index 986e1322..b696aa9f 100644
--- a/octoprint_octolapse/templates/octolapse_status_triggers.jinja2
+++ b/octoprint_octolapse/templates/octolapse_status_triggers.jinja2
@@ -1,7 +1,7 @@
+
-
-
diff --git a/octoprint_octolapse/templates/octolapse_tab.jinja2 b/octoprint_octolapse/templates/octolapse_tab.jinja2
index 6677fb5d..381d6d22 100644
--- a/octoprint_octolapse/templates/octolapse_tab.jinja2
+++ b/octoprint_octolapse/templates/octolapse_tab.jinja2
@@ -1,7 +1,7 @@
+
+
+
+
-
-
-
-
- Loading the webcam stream...
+
-
+
-
-
+
-
-
-
-
-
-
-
+
+
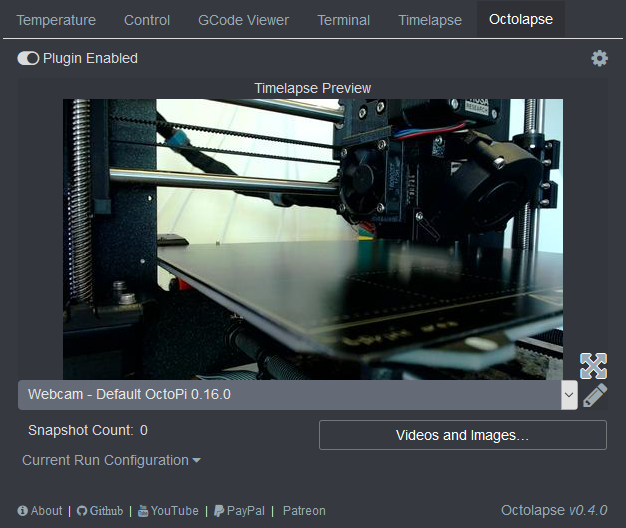 +
+  +
+ 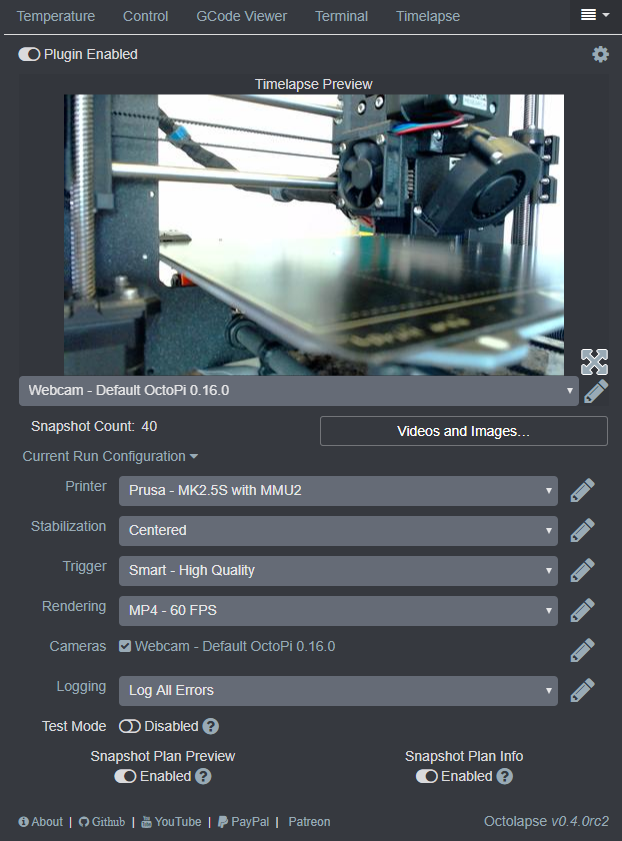 +
+ 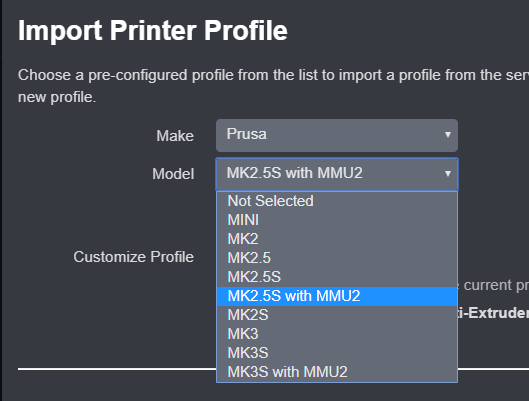 +
+ 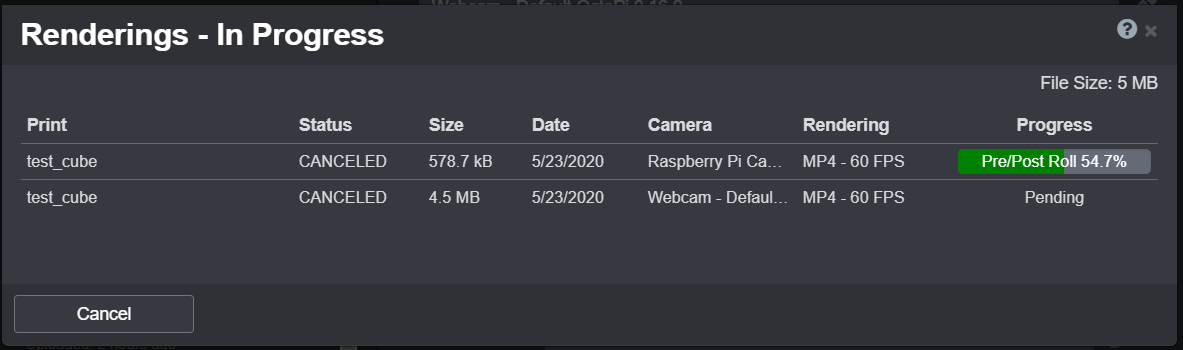 +
+ 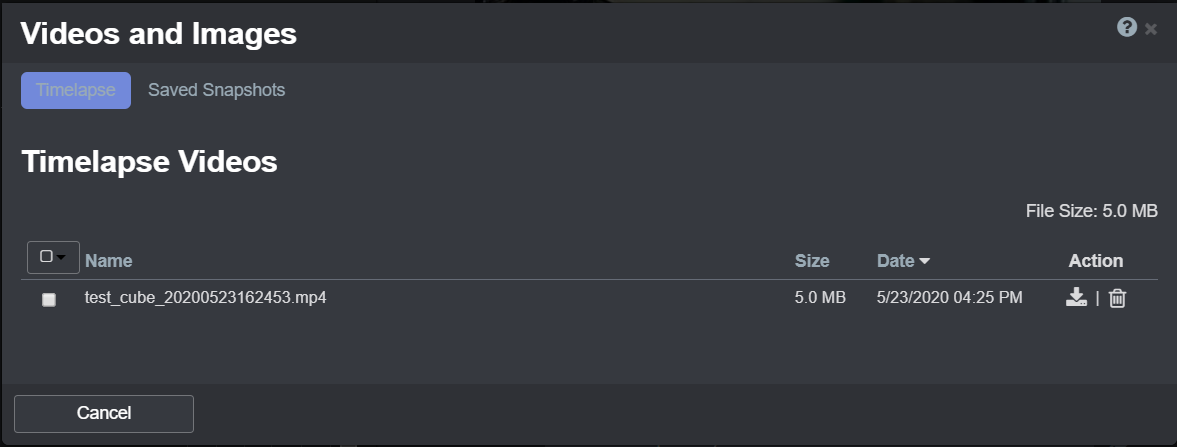 +
+ 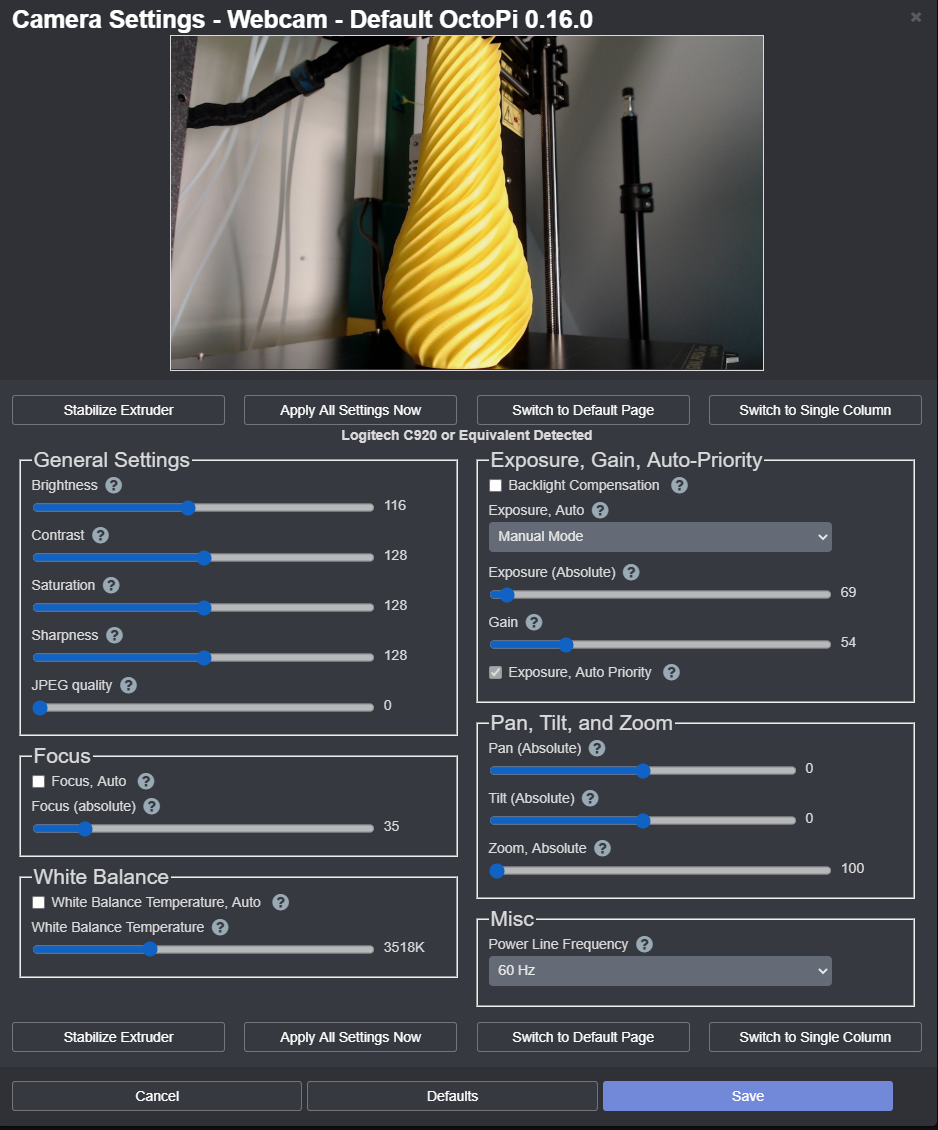 +
+  +
+  +
+  +
+