Results! #2
dayalannair
started this conversation in
General
Results!
#2
Replies: 3 comments
-
Notes
|
Beta Was this translation helpful? Give feedback.
0 replies
-
20km/h 2 carSee false alarms in last frame/s.
|
Beta Was this translation helpful? Give feedback.
0 replies
-
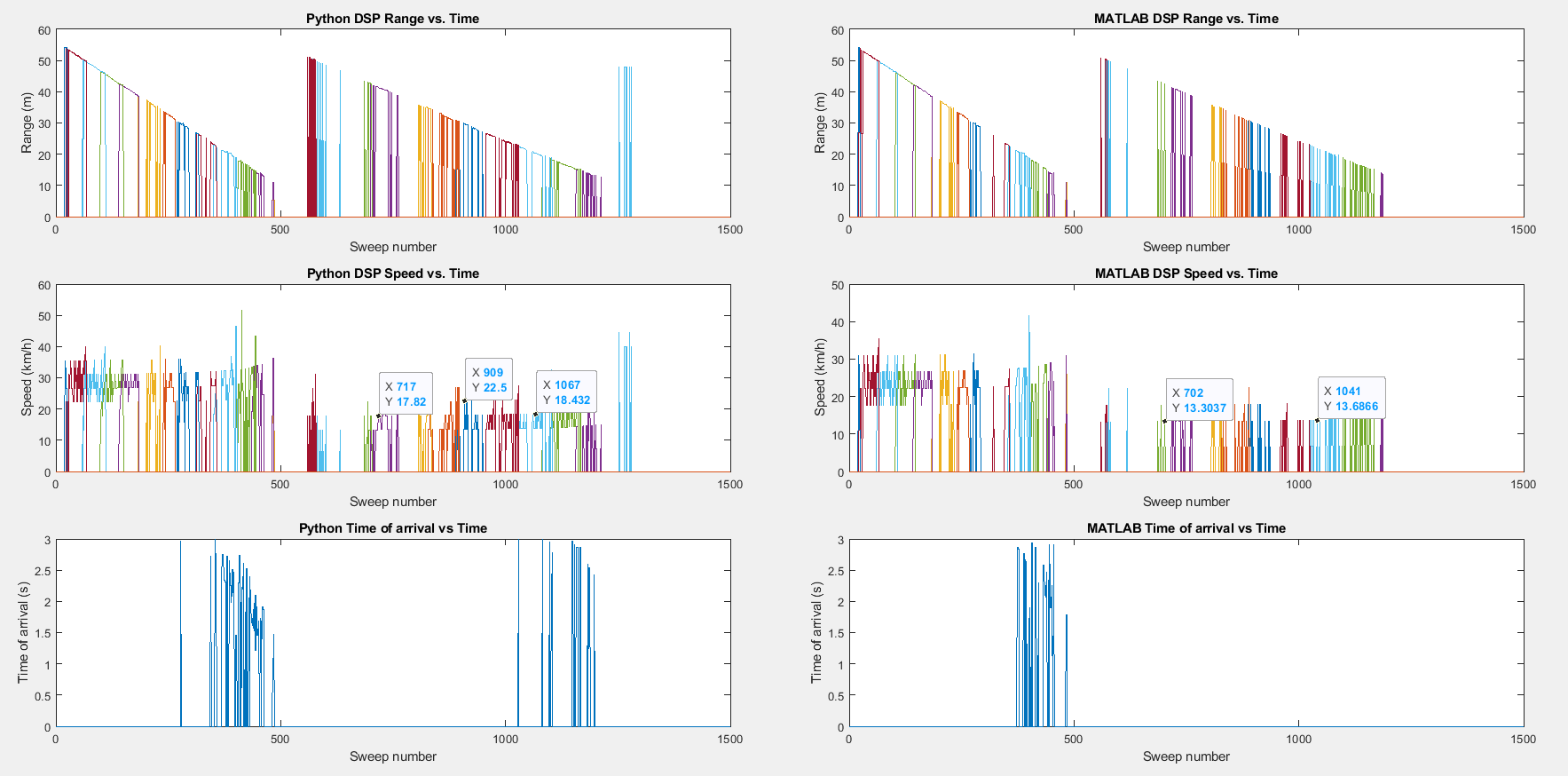
Python vs. MATLABPython seems to have better velocity accuracy: |
Beta Was this translation helpful? Give feedback.
0 replies
Sign up for free
to join this conversation on GitHub.
Already have an account?
Sign in to comment
Uh oh!
There was an error while loading. Please reload this page.
-
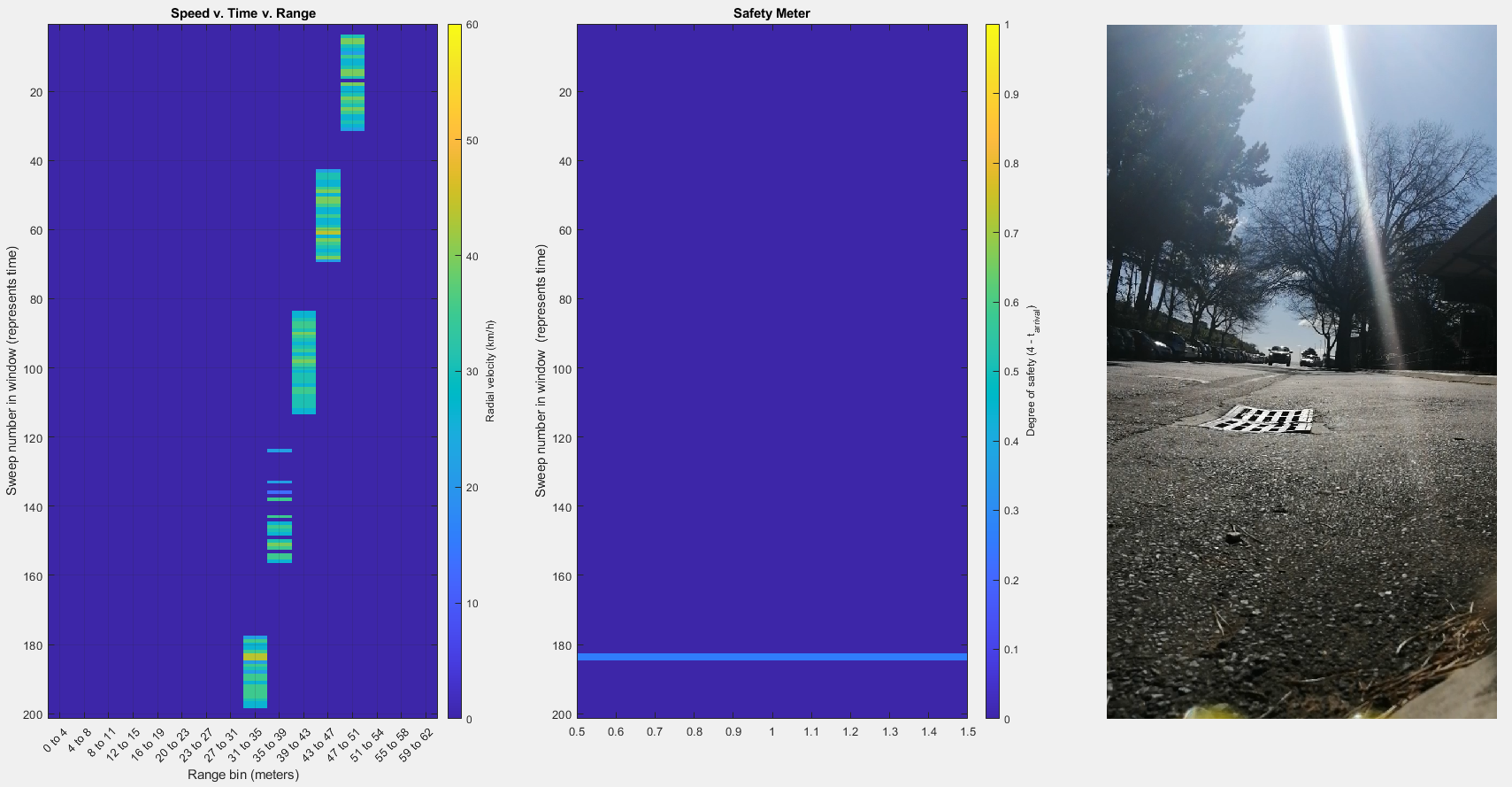
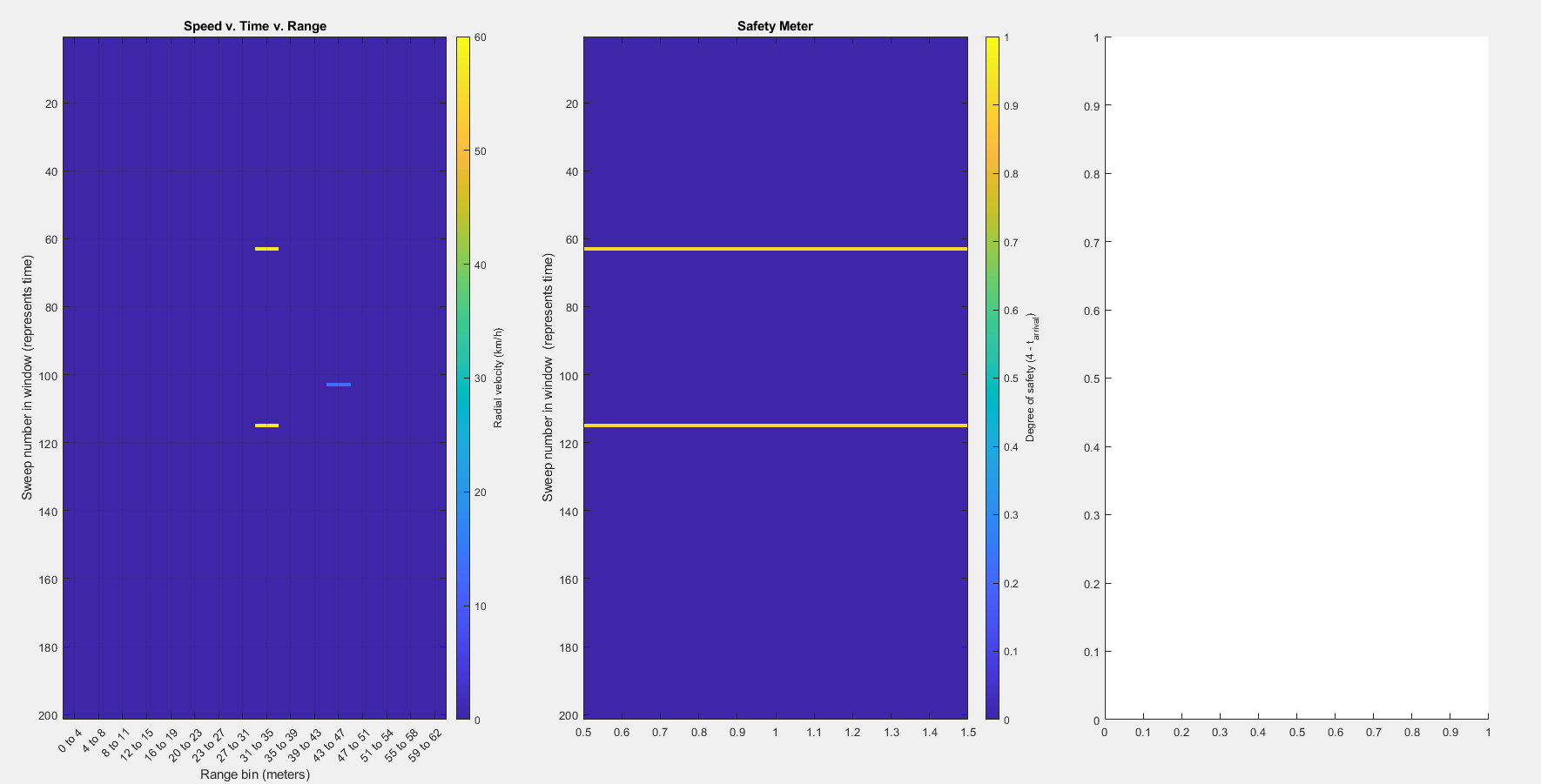
Triangle Modulation - BW = 240 MHz, Ns = 200, range bin method
Taken on upper uct road, car traveling at a known speed/controlled experiment. Safety based on a min arrival time of 3 seconds, with a max speed of 60 km/h. Speeds tested: 20, 30, 40, 50, 60, 70 km/h. Video and radar output not perfectly synchronised (magic numbers used) due to unknown time required to render colour maps. Safety meter shows 4 sec - TOA. This allows shorter times (less safe) to be shown with a 'higher' colour.
Notice the max distance and how the safety meter changes as the car approaches. Tracking is needed to fill the gaps, and to ensure a smooth PWM signal if this is to be used for indicating safety.
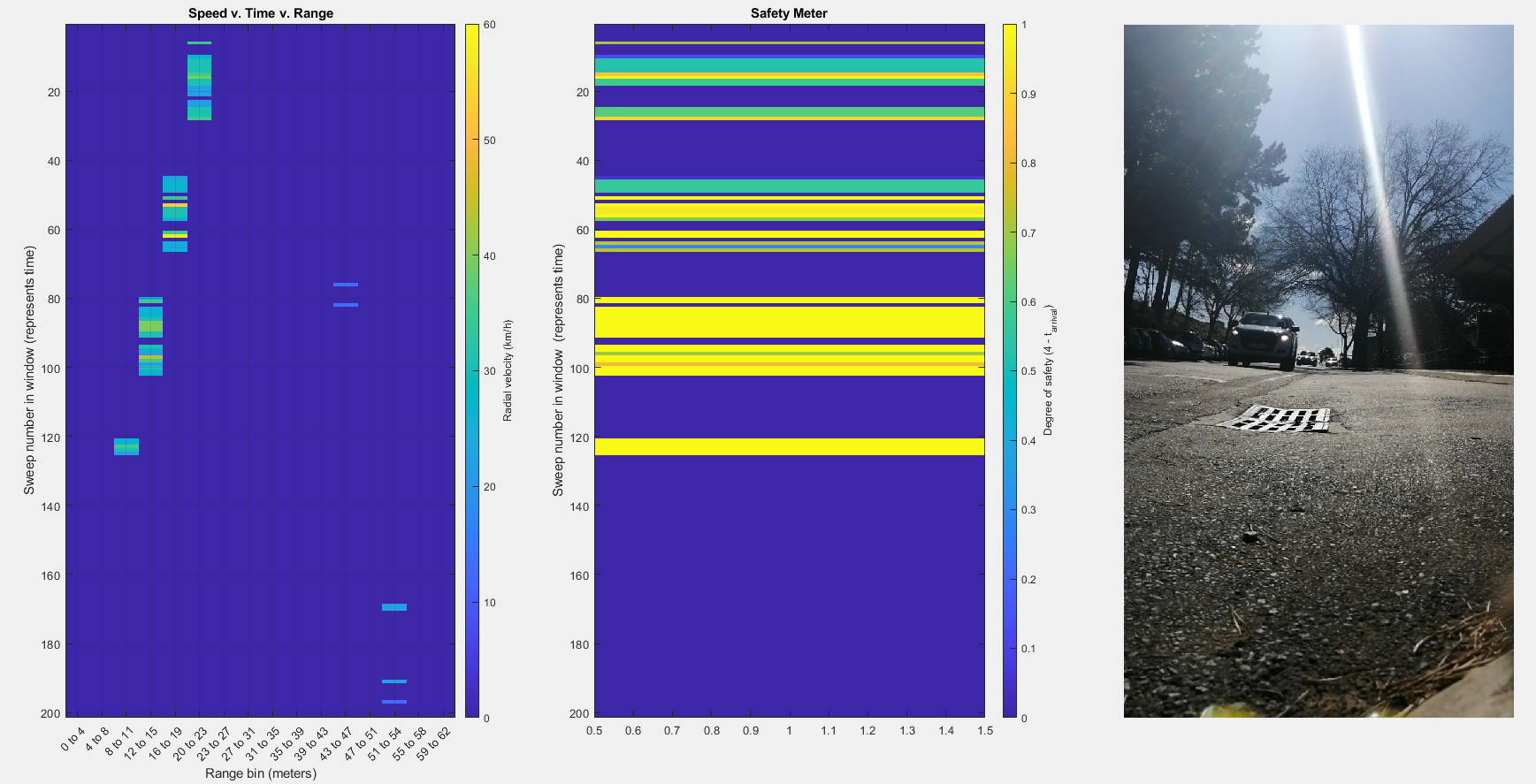
30 km/h plots
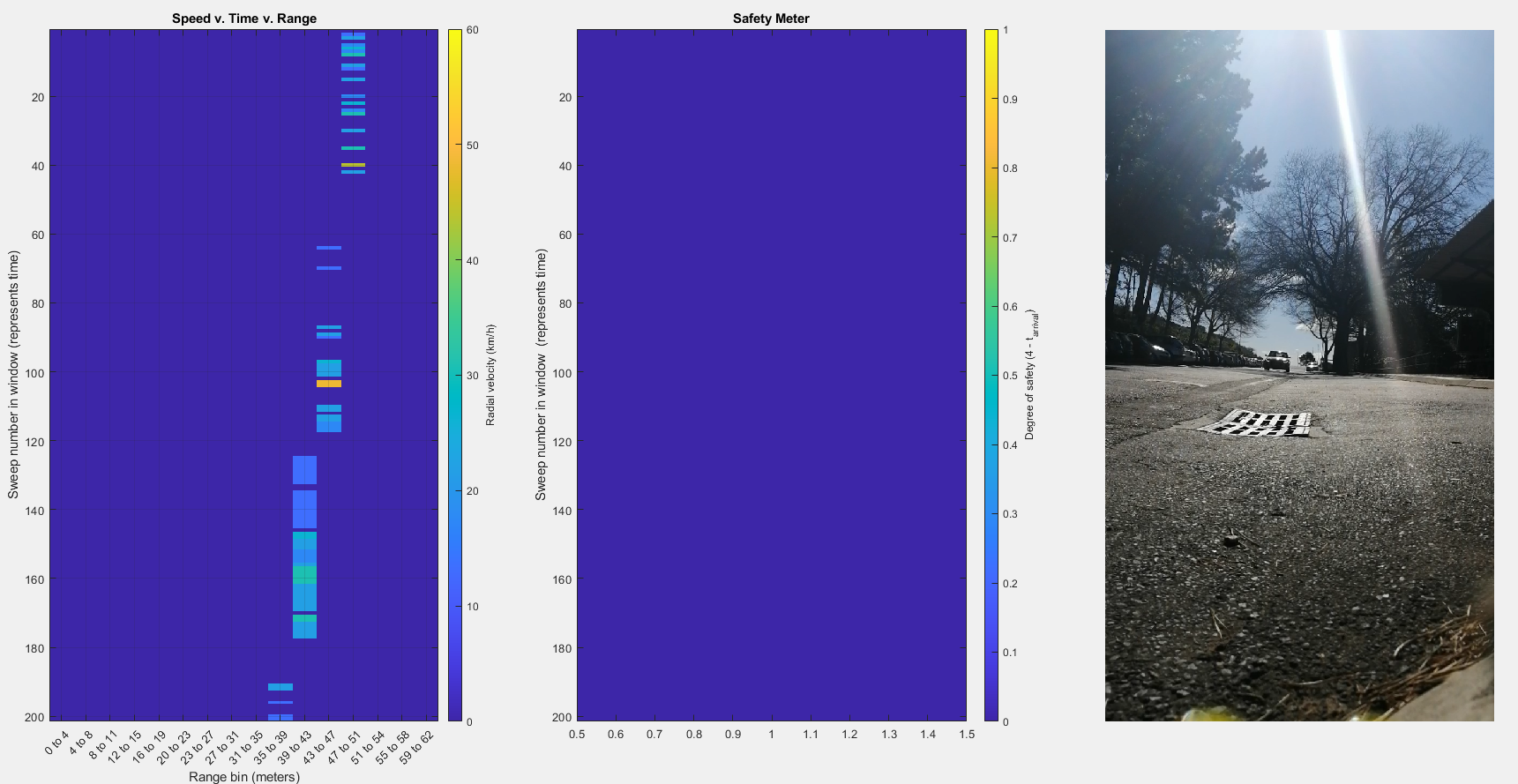
60 km/h plots
Note the late detection shown in the second plot below. Should have detected from the max range down. From a second measurement, it seems fast targets are harder to detect at further distances - could be due to weaker signals having shorter integration times.
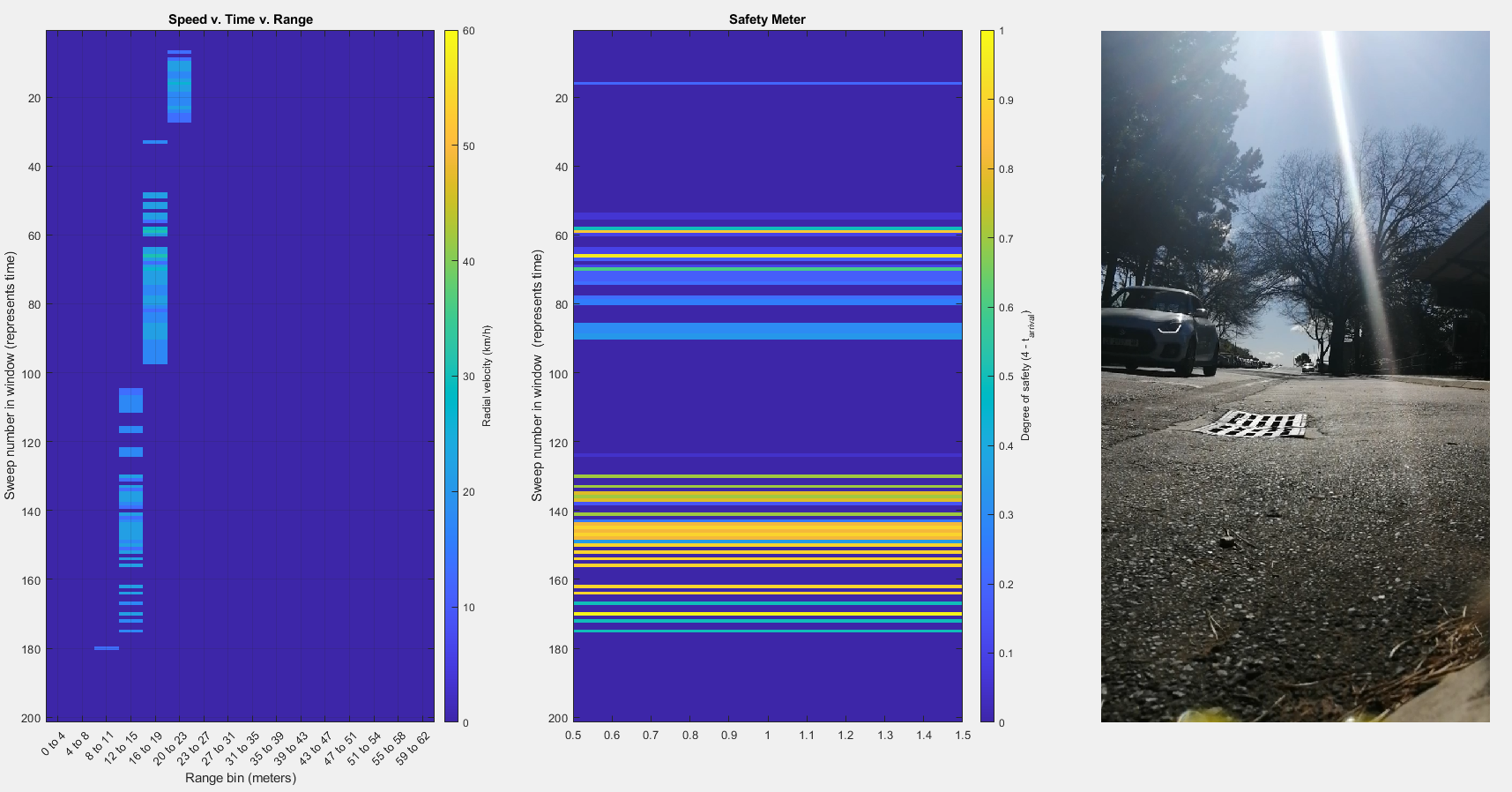
50 km/h plots
Note how event though the speed slows at the end, the short range means the turn is unsafe.
Beta Was this translation helpful? Give feedback.
All reactions