![]()
![]()
物联小白是基于 Luatos 实现的开源物联网网关和机器人系统,主要运行在合宙 Air780 系列模组上。因为是基于 4G 芯片二次开发,物联小白可以从最大程度上降低硬件成本。
市场上基于 Air780EPM 的 4G DTU,比如:银尔达 S710、DG720、D780 等,都可以通过刷机物联小白程序变身智能网关。
物联小白是开源物联网平台物联大师的一部分,可以与之无缝结合。
二次开发在线文档 god-jason.github.io/iot-noob
- 自动加载,程序按需引入
- 类定义,继承链,utils.class(parent)
- 事件机制,on once emit cancel
- 配置文件管理
- 简易数据库(与服务器同步用)
- crontab计划任务
- 物模型
- 数据点解析和编码(协议库用)
- 连接管理,串口管理
- Request数据请求封装,异步变阻塞调用(协议库用)
- 设备管理,主设备,子设备,虚拟设备
- 云平台数据上报,远程控制
- 陶晶驰串口屏
- Modbus RTU/TCP
- CJT188(需要MBus总线)
- DLT645
- 更多协议需要慢慢来~
将外置设备,比如传感器、流量计、开关等集成网关上,作为一个完整的单一设备上传到云平台
类似智能家居App的智能场景,满足对应状态和条件之后,执行对应的动作,比如:当液位下降到1米时,水泵停止工作。 对于简单自动控制逻辑的设备,直接使用智能场景即可满足。
“内联设备”和“智能场景”这两个功能对于开发者十分有用,无需开发PCB和程序,直接拿物联小白,通过485连接需要的传感器和控制器,即可形成专用的产品
- ADC 模拟量采集
- LED 指示灯
- Button 按钮
- Switch 开关(自锁按钮)
- Buzzer 蜂鸣器
- Fan 风扇,支持PWM调速
- Servo 舵机
- Stepper 步进电机(闭环电机还不支持)
- Relay 继电器
- LBS 基站定位,支持高德API 和 4G模组内置的定位
- GPS、GNSS 卫星定位
- RTC PCF8653时钟芯片
- Voice 语音输出,TTS播报
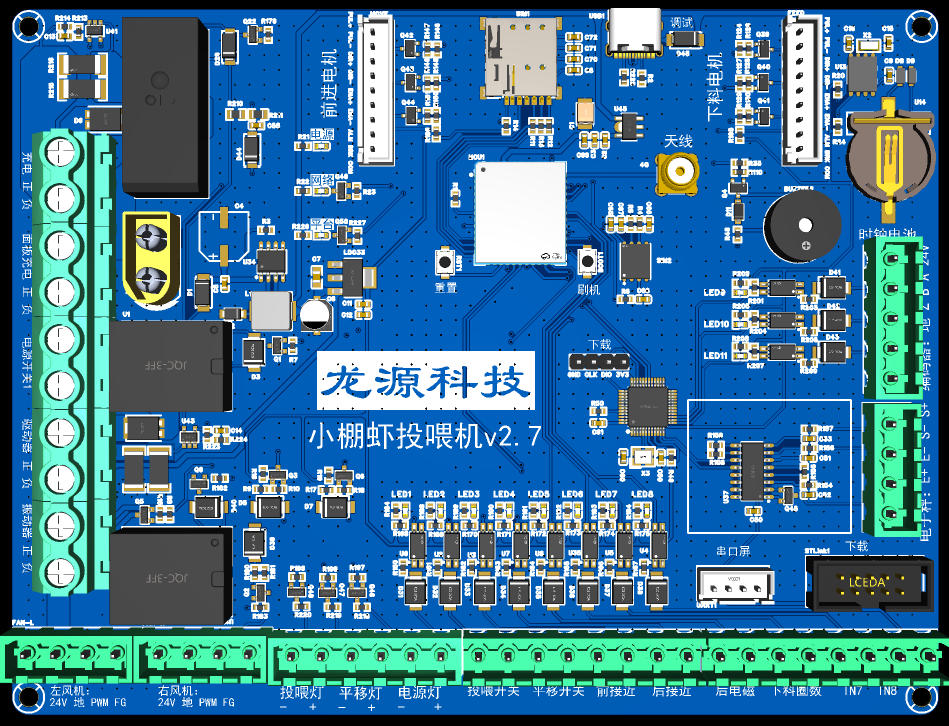
通过扩展vm模块,给执行器增加功能,实现具体的动作,比如:行走、投喂、吹风
function vm.move(task, ctx, executor)
local rpm = task.speed * 300 -- 换算具体频率和脉冲数
local rounds = task.distance * 1600
local time = components.move_stepper:start(rpm, rounds)
...
return task.wait, time
end注册计划器,将一系列动作抽象成任务
planner.register("move", function(data)
return {
tasks = {{
type = "move",
speed = 2,
distance = 10
}}
}
end)注册命令,实现的远程控制
agent.register("move", function(data)
if robot.moving then
return false, "已经在移动了"
end
-- 调用计划器,创建计划,然后交由执行器进行最终的动作执行
return robot.plan("move", data)
end)状态机主要用来维护设备的正确状态,保障任务的自动执行和取消,避免出现逻辑混乱,机器人变傻瓜
robot.fsm:register("init", {
name = "初始化",
enter = function()
battery.charge(false)
components.led_power:turn_on()
components.led_feed:turn_on()
components.led_move:turn_on()
---
end,
leave = function()
end,
tick = function()
end,
})
-- 切换对应状态
robot.fsm:switch("init", ...)
滤波算法
- 移动平均
- 中值
- 指数
- 互补
- 卡尔曼
- 粒子
- IIR
路径规划算法
- A*
- D*
- θ*
PID 算法
- 增量
- 位置
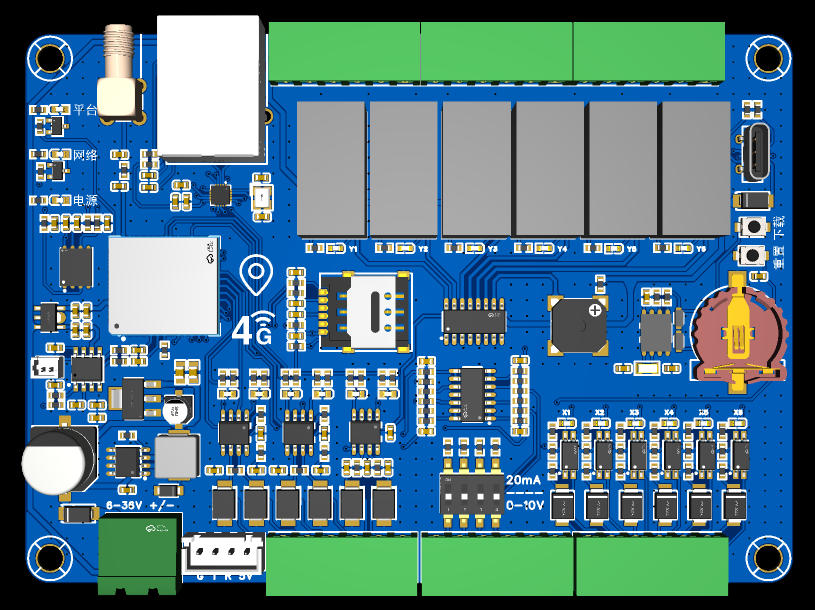
- 双SIM卡,内置5年18G流量
- 6路数字量输入,自定义有源和无源信号
- 6路继电器输出,5A,常开和常闭
- 4路模拟量,0-10V,可以通过拨码开关,切换至0-20mA
- 100M以太网接口,支持WAN和LAN模式,上网或为其他设备供网
- 高速CAN总线,支持NMEA协议

南京本易物联网有限公司
- 邮箱:jason@zgwit.com
- 手机:15161515197(微信同号)
补充:产品仅限个人免费使用,商业需求请联系我们