Home
本プロジェクトの技術的根拠・背景情報を集約したドキュメント 最終更新: 2026-03-23
| Task | AUC | Optimal F1 | Note |
|---|---|---|---|
| GW-SHM debonding (700v2) | 0.992 | 0.758 | GraphSAGE, 5-class |
| Fairing separation (15-case DOE) | 0.999 | 0.730 | +181% F1 vs 3-case baseline |
| OGW #3 wavefield (external) | 1.000 | 1.000 | Perfect on external benchmark |
| NASA CFRP fatigue (external) | 0.924 | 0.800 | Cross-dataset generalization |
Architecture comparison (700v2): SAGE 0.788 > GAT 0.758 > GCN 0.756 > GIN 0.737
Cross-domain transfer: Same-domain pretraining effective (+181% F1); cross-domain transfer not effective (negative transfer from OGW3).
GW FEM optimization: ODB storage reduced 190 GB to 2.1 GB; 15x solver speedup.
See GNN Architecture Comparison for full details.
| カテゴリ | ページ |
|---|---|
| 背景・概要 | H3ロケット総覧 · フェアリング仕様 · F8事故 · SHM文脈 |
| FEM モデリング | リアルFEM · FEMリアリズム計画 · Ground Truth FEM · GT vs Baseline · CZMソルバー試行 · 熱解析 · FEM可視化 · メッシュ収束 · C3D10バッチ · ガイド波シミュレーション |
| データセット | ノード特徴量 (34次元) · データセット形式 · S12 CZMデータセット · 静vs動評価 · 静動融合ランキング · 静動融合文献 · 生成状況 · バッチINP · 完璧度スコア · 積層構成 |
| 欠陥設計 | 欠陥生成・ラベリング · 拡張欠陥タイプ · 欠陥タイプ検証 · 欠陥物理量検証 · 発生確率・割合 · メッシュ欠陥 |
| GNN 学習・結果 | アーキテクチャ · ML戦略 · 二値分類 · 解析結果 · 論文用図表 (27枚) · アーキテクチャ比較 |
| 解釈性・高度手法 | XAIロードマップ · 2段階スクリーニング · Augmentation+物理損失 · 不確実性定量化 · マルチクラス |
| 先端技術 | 最先端ML · PRAD (Physics-Residual AD) · 文献調査 2024–2026 |
| 研究計画 | 2年目標 (World-Class) · ロードマップ · Roadmap-2028 · ベンチマーク目標 · 文献レビュー · 投稿先 · 研究レポート · 理想vs実装 · 想定Q&A |
| 次世代技術 | Physics Foundation Model · 自律損傷管理 (ADM) · 量子コンピューティング |
| ロケット会社 | 技術マップ (全領域) · 打ち上げ軌道シミュレーション · フェアリング分離ダイナミクス |
| リファレンス | 英単語集 · 外部データセット調査 · データセット比較 · 外部リソース (OSS/公開データ) · GitHub Issues |
| 項目 | 状態 |
|---|---|
| FEM モデル | ✅ CZM S12 (1/12セクター, COH3D8接着層) + C3D10 ソリッドコア — 詳細 |
| 荷重条件 | ✅ 熱勾配 + 差圧 30kPa + 重力 3G — リアリズム ~75% |
| バッチ INP | ✅ 250 INP 生成完了 (161 Debond + 41 FOD + 38 Impact + 10 他) — 詳細 |
| ソルバー | 🔄 Abaqus 実行中 (13/250 完了) — 進捗 |
| 既存データ | ✅ S12 CZM 96サンプル PyG変換済 — S12データセット |
| GNN | ✅ GCN / GAT / GIN / SAGE 4 種実装・初回学習済 |
| 計算環境 | CPU (frontale×3 + marinos) + GPU 24GB × 4枚 (vancouver02) |
| 現フェーズ | Phase 3: 大規模バッチソルバー実行 → ロードマップ |
| 2年目標 | World-Class Edition — Foundation Model + 自律損傷管理 + Edge AI → 2-Year-Goals · Roadmap-2028 |
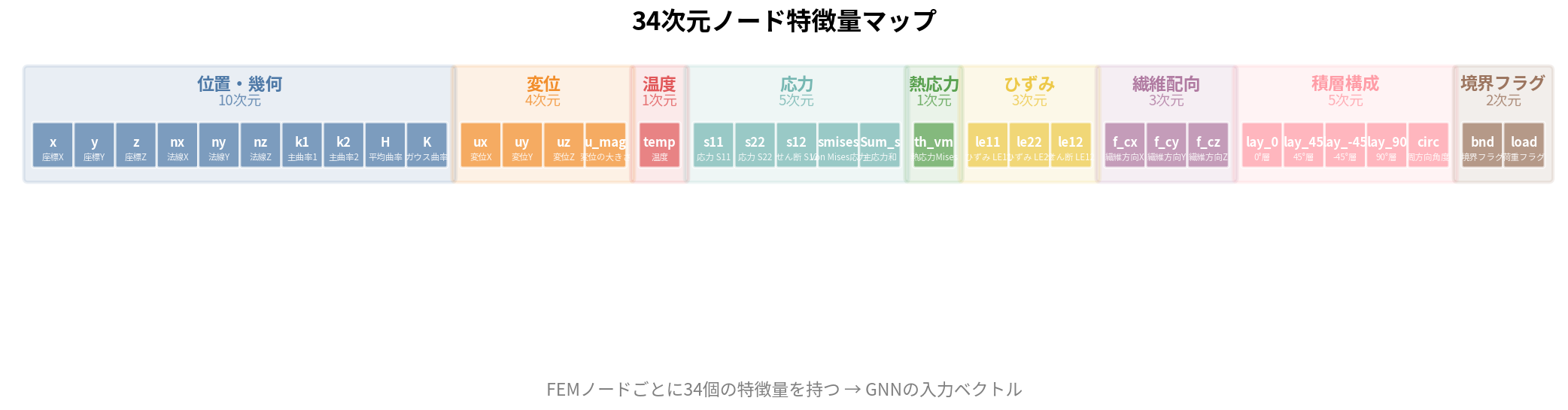
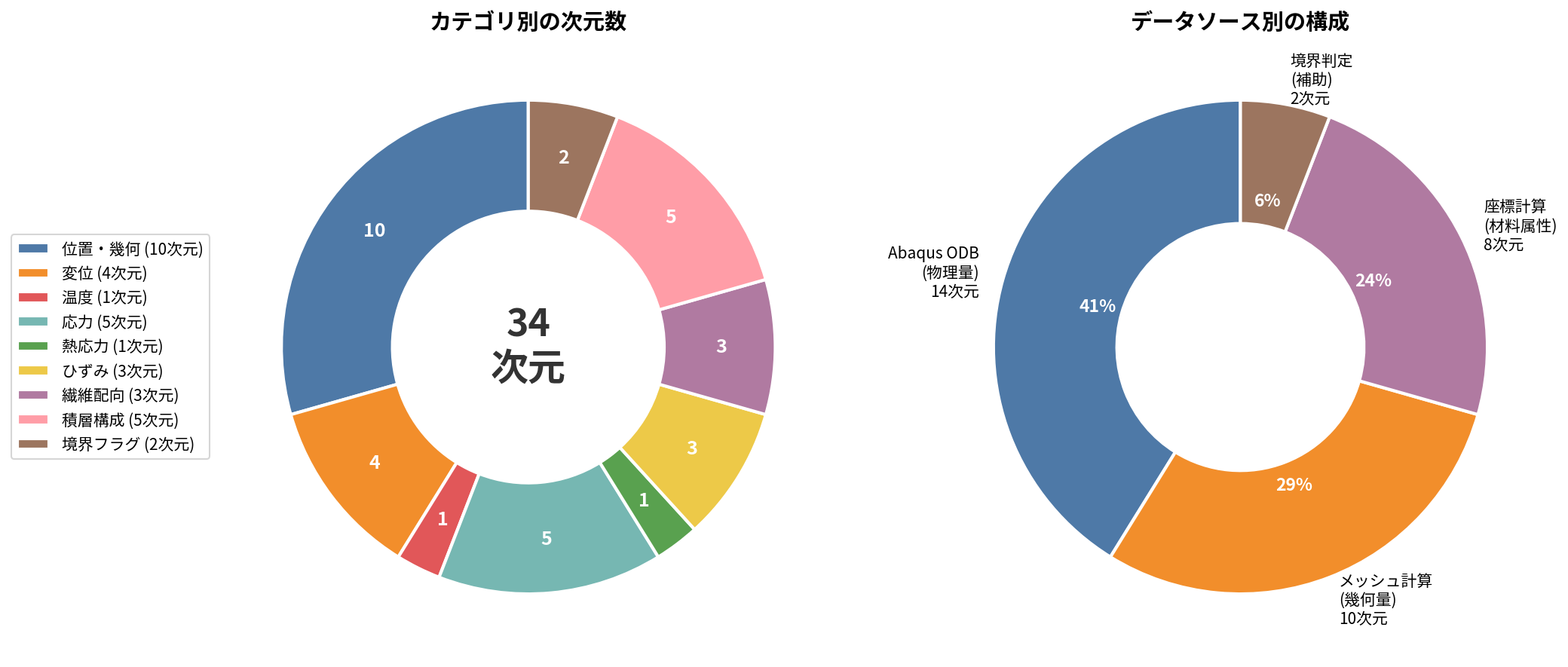
GNNの入力となる34次元ノード特徴量の構成。詳細は Node-Features を参照。
| 特徴量マップ | カテゴリ構成 |
|---|---|
 |
 |
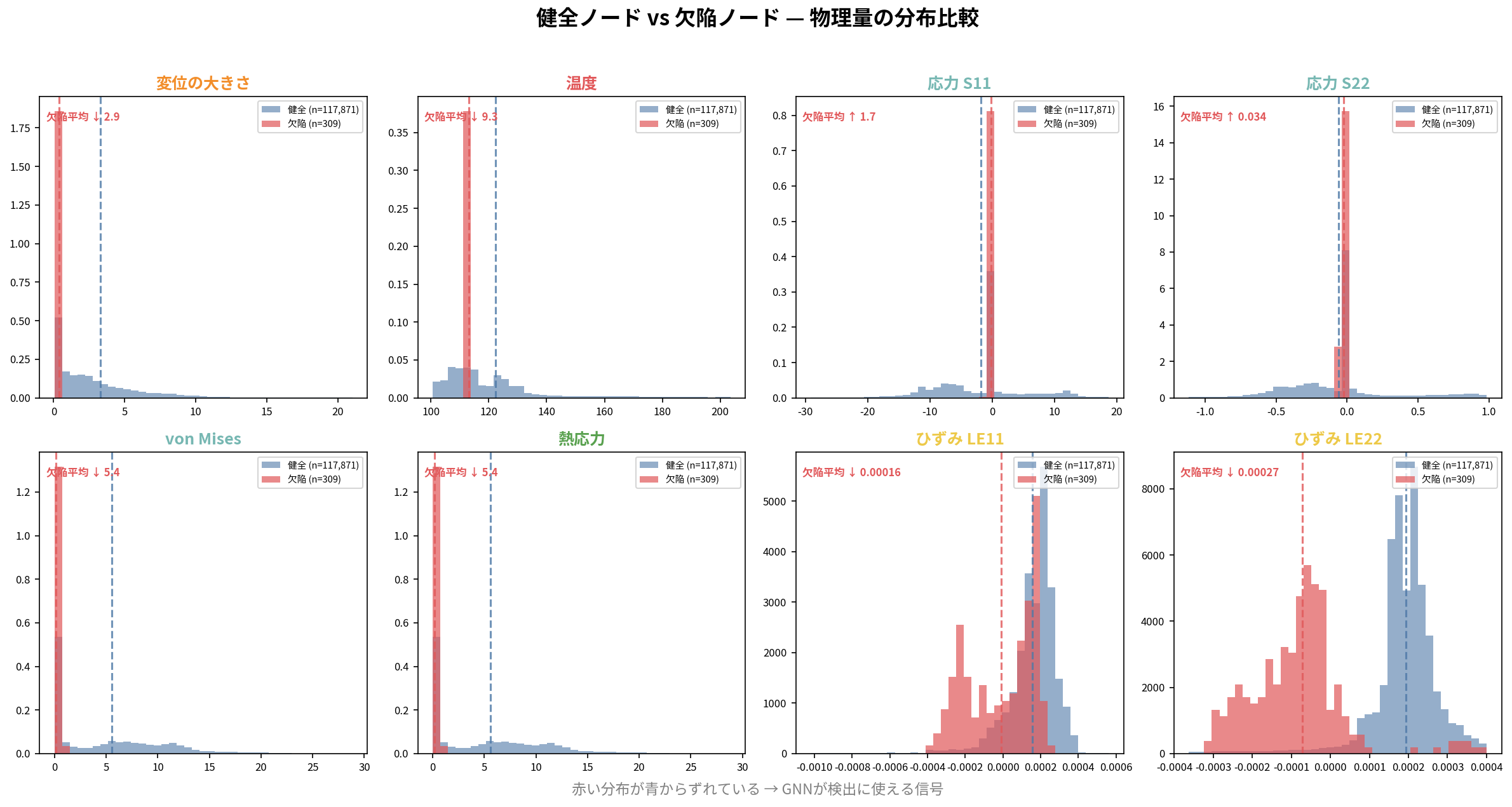
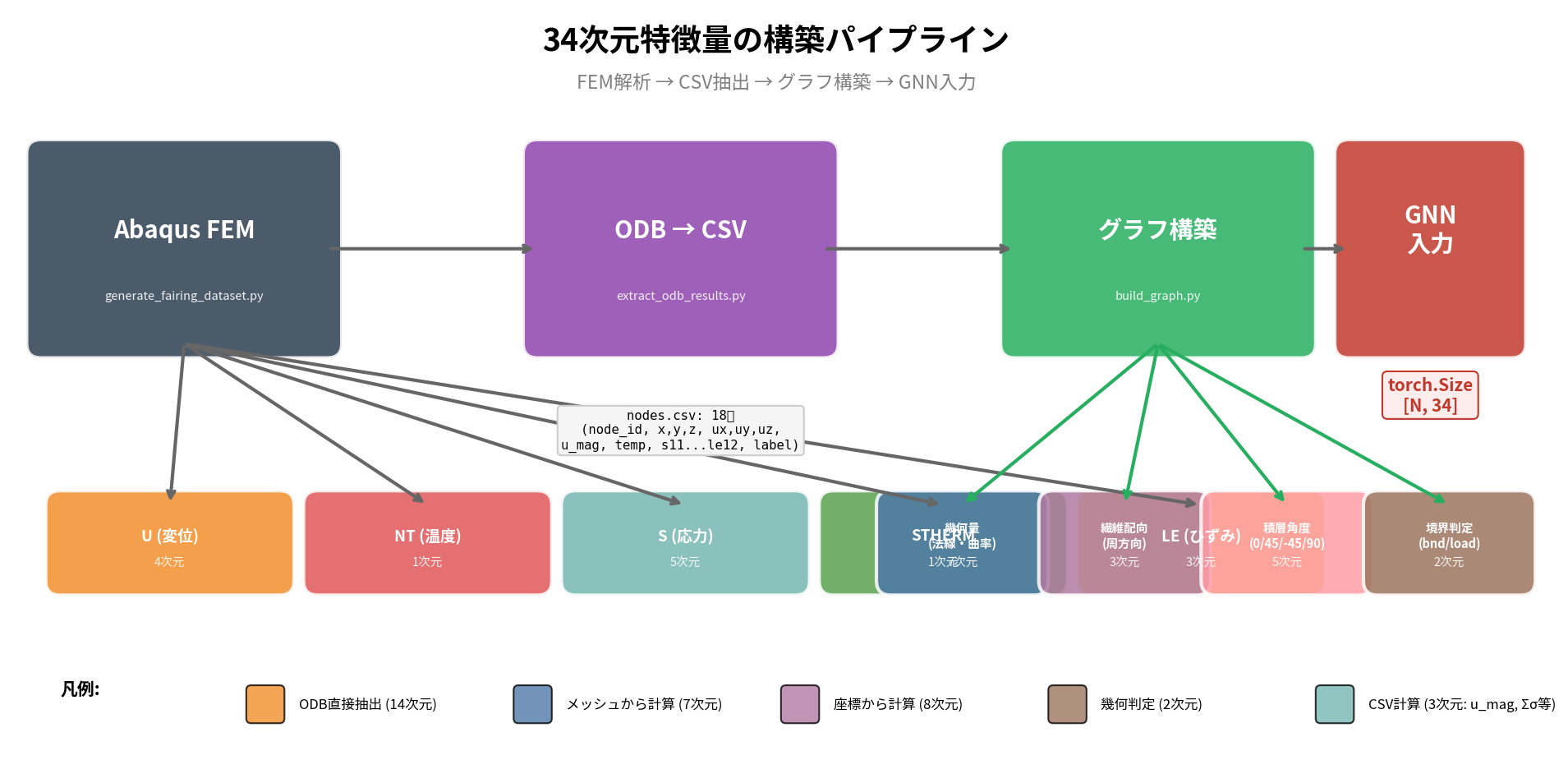
| 欠陥 vs 健全 | パイプライン |
 |
 |
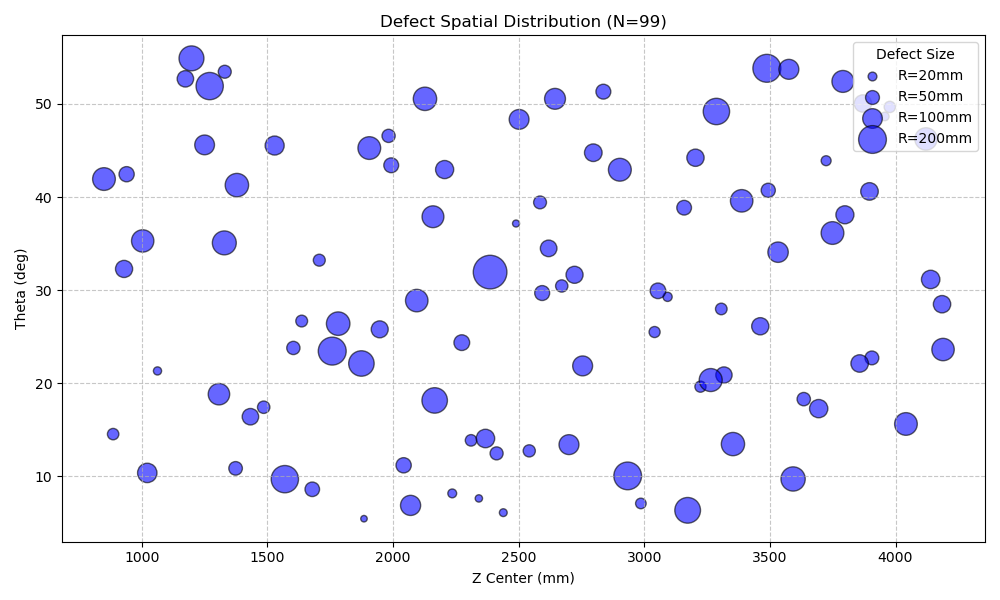
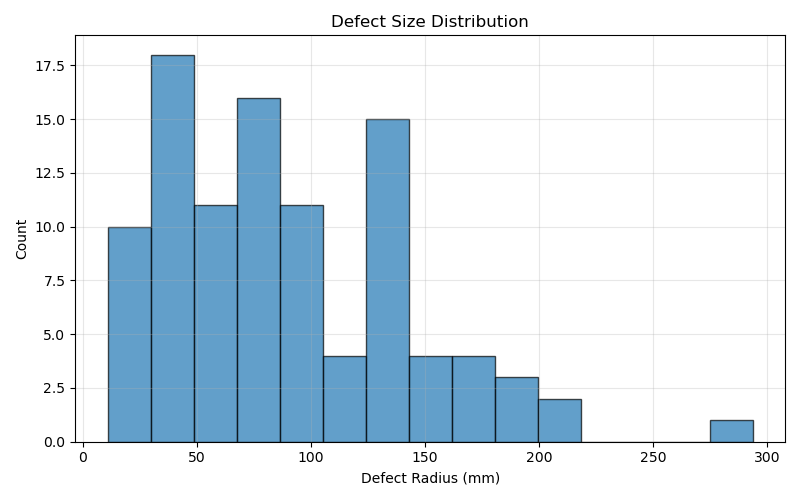
最新のデータセット (N=99) の分布状況。詳細は Dataset-Generation-Status を参照。
| 空間分布 | 欠陥サイズ分布 |
|---|---|
 |
 |
- ターゲット選定: なぜ H3 フェアリングか
- H3 ロケット総覧
- フェアリング技術詳細(形状可視化含む)
- F8 事故と本研究の関連性
- SHM (構造ヘルスモニタリング) コンテキスト
- GNN アプローチの根拠
- GNN以外の最新代替モデル案
- シミュレーション設計根拠
- 参考文献・ソース
Epsilon User's Manual p.17 原文:
"The PLF employs the proven track record technology of H-IIA/B PLF. It has aluminum-skin, aluminum-honeycomb-sandwich structure and incorporates the clamshell separation system."
川崎重工 ANSWERS (H3):
「H3ではCFRPプリプレグ自動積層スキン/アルミハニカムサンドイッチパネル構造とします」
H-IIA/B → Epsilon は 全アルミ フェアリングを継承した。H3 で初めて CFRP スキン に切り替わった。これが本プロジェクトの出発点である。
| 観点 | Epsilon (= H-IIA/B 継承) | H3 (新規) |
|---|---|---|
| スキン材 | Al 7075 (0.3–0.6 mm) | CFRP AFP (推定 1.0–1.5 mm, T1000クラス) |
| コア材 | Al Honeycomb | Al Honeycomb (5052系) |
| パネル総厚 | ~40 mm | ~40 mm (KHI公表) |
| 製造 | Autoclave (従来) | OoA + AFP (新工法) |
| 接合 | ボルト/ナット | CFRP板 + 接着剤 |
| 現象 | Epsilon (Al/Al) | H3 (CFRP/Al) |
|---|---|---|
| ガイド波分散 | 等方性 | 異方性 (繊維配向依存) |
| CTE ミスマッチ | ≈0 (Al同士) | 巨大 (CFRP ≈ −0.3×10⁻⁶ vs Al ≈ 23×10⁻⁶ /°C) |
| デボンディング駆動力 | 衝撃のみ | 熱応力 + 音響疲労 + 衝撃 |
| SHM ニーズ | 低 (成熟40年) | 高 (新材料系, 実績蓄積中) |
| GNN学習データ互換 | Al等方性 → CFRP転用不可 | CFRP固有の異方性を学習可能 |
- H3 は今後 30年間 の日本の基幹ロケット → 最大の産業インパクト
- 「H3 CFRP フェアリングの GNN-SHM」は 未開拓テーマ
- JAXA JMR-002 "No-Growth" 要件が CFRP 接着構造に直接適用 → SHM が規格上も必要
- F8事故 (後述) で CFRP/Al-HC サンドイッチ構造の接着健全性が現実の問題として顕在化
- KHI + 東レの AFP/OoA 新技術との連携可能性
| 項目 | 値 |
|---|---|
| 開発 | JAXA + 三菱重工業 (MHI) |
| 目的 | H-IIA/B 後継の次世代基幹ロケット |
| 設計思想 | "使いやすいロケット" — モジュラー構成・低コスト・高信頼性 |
| 全長 | 約 57 m (構成による) |
| LEO能力 | 最大 ~6.5 t (H3-24 構成) |
| GTO能力 | 最大 ~6.5 t (H3-24 構成) |
| 桁 | 意味 | 選択肢 |
|---|---|---|
| a (エンジン数) | 第1段 LE-9 基数 | 2 or 3 |
| b (ブースター数) | SRB-3 本数 | 0, 2, or 4 |
| c (フェアリング) | フェアリング型式 | S (Short), L (Long), W (Wide) |
例: H3-22S = LE-9×2, SRB-3×2, Short fairing / H3-30S = LE-9×3, SRB-3×0, Short fairing
| 項目 | 値 |
|---|---|
| サイクル | エキスパンダーブリードサイクル (世界初の第1段用) |
| 推力 | ~1,471 kN (真空) / ~1,220 kN (海面) |
| 推進剤 | LH2 / LOX |
| 比推力 | ~425 s (真空) |
| 基数 | 2基 or 3基 |
| 特徴 | LE-7A (二段燃焼) より構造が簡素で信頼性向上・コスト低減 |
| 項目 | 値 |
|---|---|
| サイクル | エキスパンダーブリードサイクル |
| 推力 | ~137 kN (真空) |
| 推進剤 | LH2 / LOX |
| 燃焼時間 | 最大 740 s (LE-5B-2 の 534 s から延長) |
| 改良点 | LH2ターボポンプ耐久性向上, ミキサー改良による燃費改善 |
| 基数 | 1基 |
| 項目 | 値 |
|---|---|
| 推力 | ~2,158 kN |
| ケース材 | CFRP (フィラメントワインディング) |
| 共通性 | Epsilon S の第1段と共通 |
| 本数 | 0, 2, or 4本 |
| # | 名称 | 日付 | 構成 | ペイロード | 軌道 | 結果 | 備考 |
|---|---|---|---|---|---|---|---|
| 1 | TF1 | 2023/03/07 | H3-22S | ALOS-3 (だいち3号) | SSO | 失敗 | 第2段 LE-5B-3 着火せず → 指令破壊 |
| 2 | TF2 | 2024/02/17 | H3-22S | VEP-4, CE-SAT-IE | LEO | 成功 | 初の軌道投入成功 |
| 3 | F3 | 2024/07/01 | H3-22S | ALOS-4 (だいち4号) | SSO | 成功 | 初の実運用ミッション |
| 4 | F4 | 2024/11/04 | H3-22S | DSN-3 (きらめき3号) | GTO | 成功 | 防衛通信衛星 |
| 5 | F5 | 2025/02/02 | H3-22S | QZS-6 (みちびき6号) | QZO | 成功 | 準天頂衛星 |
| 6 | F6 | 2025 (後半) | H3-30S | 技術実証 | — | 成功 | 日本初ブースターなし大型液体ロケット |
| 7 | F7 | 2025/10/26 | H3-24W | HTV-X1 | LEO/ISS | 成功 | 新型補給機, Type-W フェアリング初使用 |
| 8 | F8 | 2025/12/22 | H3-22S | QZS-5 (みちびき5号) | QZO | 失敗 | 衛星搭載構造 (PSS) 破損 → 詳細後述 |
| 9 | F9 | (延期中) | — | QZS-7 (みちびき7号) | QZO | — | F8 原因究明中のため延期 |
戦績: 8回中 6勝2敗 (成功率 75%), 2敗とも第2段系統の問題
- F8 事故調査が進行中。F9 以降の打ち上げは調査完了まで凍結
- 基幹ロケット有識者検討会が定期的に進捗を報告
- 国産ロケットによる打ち上げが一時的に停止状態
| 型式 | 直径 | 全長 | 製造者 | 初飛行 |
|---|---|---|---|---|
| Type-S (Short) | 5.2 m | 10.4 m | KHI (川崎重工) | TF1 (2023) |
| Type-L (Long) | 5.2 m | 16.4 m | KHI | — |
| Type-W (Wide) | 5.4 m | ~16 m | Beyond Gravity (旧RUAG) | F7 (2025/10) |
| パラメータ | 値 | ソース |
|---|---|---|
| 構造形式 | CFRP / Al-Honeycomb サンドイッチ | KHI, JAXA |
| スキン材 | CFRP (T1000クラス, AFP自動積層) | KHI, 東レ |
| コア材 | Al 5052 Honeycomb | 推定 (H-IIA継承) |
| パネル総厚 | ~40 mm | KHI ANSWERS |
| スキン厚 | 推定 1.0–1.5 mm (8–12 ply) | 推定 |
| コア厚 | 推定 ~38 mm | 総厚 − 両面スキン |
| ノーズ形状 | オジャイブ (滑らかな流線形) | KHI |
| 分離方式 | Clamshell (2分割), Notched Bolt | JAXA |
H3 フェアリングの製造には 2 つの革新技術が導入された:
AFP (Automated Fiber Placement / 自動繊維配置)
- 大型 AFP 装置で CFRP プリプレグテープをハニカムコア上に自動積層
- オジャイブ形状の高精度な曲面成形を実現
- 製造時間短縮 + コスト低減
- H-IIA/B のアルミスキンでは不可能だった流線形状 → 空気抵抗低減 + 搭載容積拡大
OoA (Out of Autoclave / 脱オートクレーブ)
- オートクレーブ不使用の常圧加温成形
- 縦結合部: ボルト/ナットではなく CFRP板 + 接着剤 で接合
- 大型オートクレーブ不要 → 設備コスト低減
- 接着接合により軽量化を達成
| 機能 | 仕様 |
|---|---|
| 温湿度管理 | 空調ドアによるフェアリング内部環境制御 |
| 防音 | 吸音材 (アコースティックブランケット), 内部 ~135–140 dB に低減 |
| 耐熱 | シリコンフォーム断熱材, 300°C 以上 対応 |
| 分離 | 低衝撃分離 (Notched Bolt + 非火薬式アクチュエータ) |
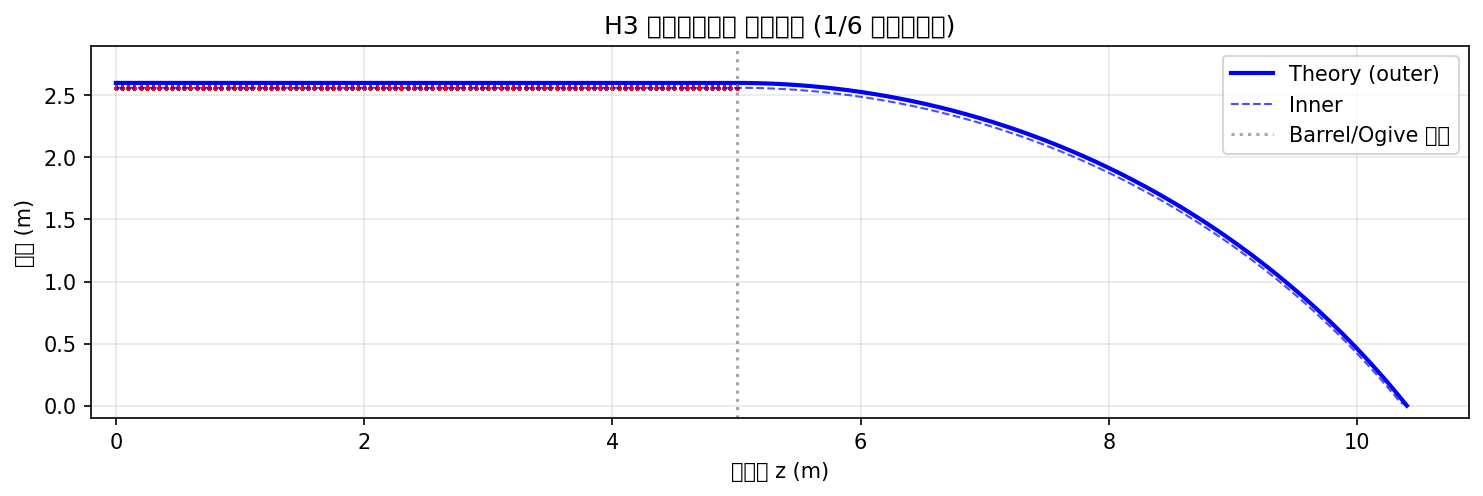
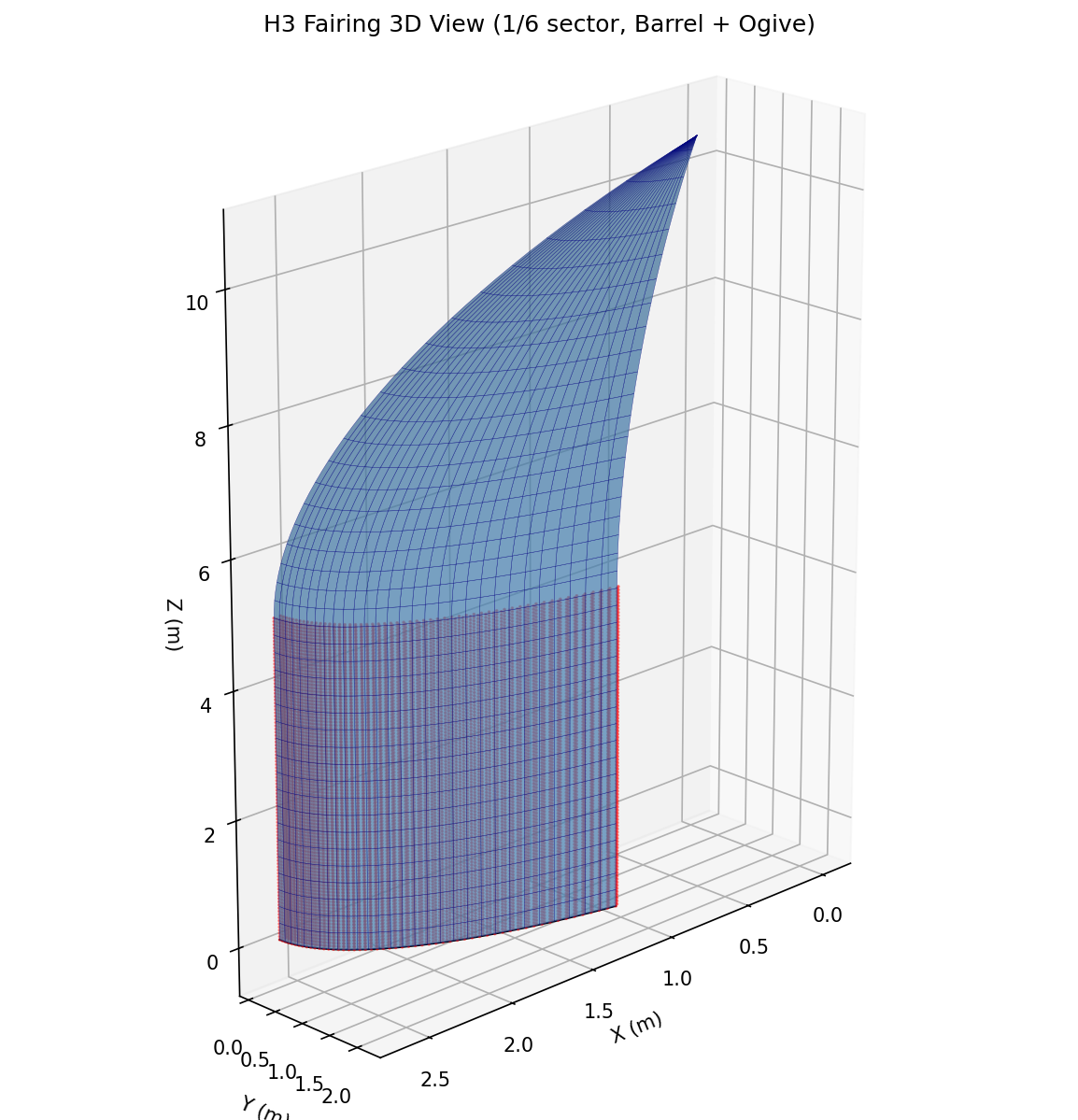
本プロジェクトの FEM モデル (generate_fairing_dataset.py) は H3 Type-S 仕様に整合した Barrel + Tangent Ogive 形状を採用している。
| 項目 | 値 |
|---|---|
| 全長 | 10.4 m (Barrel 5.0 m + Ogive 5.4 m) |
| 直径 | 5.2 m |
| 対称 | 1/6 セクション (θ=60°) |
2D 断面 (R-z)
3D 表示 (1/6 セクション)
可視化スクリプト:
python scripts/visualize_fairing_h3_check.py # 2D + H3整合性チェック
python scripts/visualize_fairing_3d.py # 3D 表示欠陥なしの精度が極めて重要 — 健全データに誤りがあると全サンプルで系統的バイアスが発生する。デボンディング挿入前に必ず全項目 PASS を確認すること。
検証スクリプト: scripts/validate_healthy_baseline.py
| カテゴリ | 検証内容 |
|---|---|
| Geometry | z/r/θ 範囲、1/6 セクション |
| Integrity | NaN/Inf なし、重複なし、要素-節点整合 |
| Labels | defect_label 全て 0 |
| Physics | 応力・変位の妥当範囲 |
| Metadata | n_nodes, n_elements, defect_type 一致 |
| Parts | Skin_Outer, Skin_Inner, Core 節点存在 |
| Preprocess | PyG Data 変換成功 |
python scripts/validate_healthy_baseline.py --report figures/healthy_validation_report.txt詳細: docs/HEALTHY_BASELINE_CHECKLIST.md
- 直径 5.4 m の標準設計を Ariane 6, Vulcan Centaur 等と共有
- Al-Honeycomb コア + CFRP カバーレイヤー
- 自動化製造プロセス (オートクレーブ不使用)
- PSS (Payload Support Structure) も Beyond Gravity が供給
- 100% 成功率 の実績 (全ロケット合計)
- F7 (HTV-X1, 2025/10/26) で H3 初飛行
JAXA H3 研究者が妥当と認める欠陥パラメータに基づく。詳細: docs/DEFECT_PLAN.md
| 項目 | 仕様 |
|---|---|
| 界面 | 外スキン-コア (F8 PSS と類似) |
| サイズ階層 | Small 50–100 mm, Medium 100–150, Large 150–250, Critical 250–400 mm |
| 位置 | θ 5–55°, z 800–4200 mm (Barrel) |
| 割合 | Small 25%, Medium 40%, Large 30%, Critical 5% |
python src/generate_doe.py --n_samples 50 --output doe_phase1.json
python src/run_batch.py --doe doe_phase1.json --output_dir dataset_outputデータセット品質: 熱パッチ適用・NT11 抽出により変位・温度が正しく記録される。検証: python scripts/verify_dataset_quality.py。詳細: Dataset-Generation-Status
2025年12月22日、H3-22S 8号機がみちびき5号を搭載して打ち上げられたが、衛星搭載構造 (PSS: Payload Support Structure) の破壊により、衛星が第2段から脱落。第2段エンジン LE-5B-3 の第2回燃焼も異常停止し、ミッションは失敗した。
[打ち上げ前]
PSS 内部に製造時の CFRP/Al-HC 界面剥離が存在
↓
[上昇中 — 高度上昇に伴う外部真空化]
パネル内部の残留空気 (~1 atm) と外部真空の圧力差
→ 既存の剥離が段階的に進展
↓
[フェアリング分離 (火工品点火)]
分離衝撃がトリガー
→ 62 ms 以内に PSS 構造が座屈・破壊
→ 衛星が第1段側に落下
- FTA (故障の木解析): 6項目 → 5項目に絞り込み (フェアリング接触は排除)
- 製造検査: 検査済み PSS 4個全て で想定を超える剥離を確認
- 有力要因: CFRP スキンと Al-Honeycomb コアの 製造時の接着不良 (デボンディング) が、飛行中に進展し破壊に至った
- F9 以降: 原因究明完了まで打ち上げ凍結
F8 事故は、CFRP/Al-Honeycomb サンドイッチ構造の接着健全性モニタリングが「理論的な研究テーマ」ではなく「現実の喫緊課題」であることを実証した。
| 事故の教訓 | 本プロジェクトでの対応 |
|---|---|
| 製造時の接着不良が見逃された | → GNN による欠陥位置特定で検出精度向上 |
| 飛行中に剥離が進展した | → CTE 不整合による熱応力をFEMで再現しGNNに学習 |
| 目視検査では検出困難 | → Lamb波ガイド波SHMによる非接触・大面積検査 |
| PSS もサンドイッチ構造 | → フェアリング以外のサンドイッチ構造にも応用可能 |
- 対象構造: CFRP スキン / Al-Honeycomb コア サンドイッチ構造
- 対象欠陥: スキン-コア界面のデボンディング (剥離)
- 駆動力: CTE 不整合熱応力 + 音響疲労 (147–148 dB) + 衝撃 + 製造欠陥
- 課題: φ5.2 m × 10–16 m の巨大表面積 → 手動 NDI は高コスト → 自動 SHM の価値大
Lamb 波モード:
| モード | 特性 | 用途 |
|---|---|---|
| S₀ (対称) | 高速, 低分散 | 長距離伝播, 面内欠陥 |
| A₀ (反対称) | 面外変位大, 高分散 | デボンディング検出に最適 |
| Skin Mode | 高周波, スキン内に閉じ込め | 局所的なスキン-コア剥離検出 |
デボンディングの波動シグネチャ:
- 剥離領域で境界条件が "supported" → "free" に変化
- 波動エネルギーが剥離領域にトラップ → 振幅増幅・リンギング
- 位相速度低下 (サンドイッチ → 薄板)
- A₀ モードの散乱パターンが GNN の入力特徴量となる
- 異方性分散: 波速が伝播方向と繊維配向の関係に依存
- 高減衰: ハニカムコアが高周波を吸収 → センサ間隔 30–50 cm が必要
- 温度感度: CTE 不整合 → 温度変化で見かけの欠陥信号が発生 → 温度補償 が必須
- 曲率効果: 円筒形状でモード変換・集束/発散が発生 → 平板モデルの直接適用不可
-
JAXA-JMR-002: 安全重要複合材構造に "No-Growth" 要件
- 検査不能な欠陥は、供用荷重下で成長しないことを実証する必要
- SHM は定期 NDI の代替として "Condition-Based Maintenance" (CBM) を可能にする
- 安全率: 構造安全率 SF > 1.4 (降伏) / 1.5 (破壊)
| 項目 | 仕様 |
|---|---|
| センサ種別 | PZT (圧電) アレイ |
| 配置 | 内皮面 (フェアリング内側) |
| 間隔 | 30–50 cm |
| 方式 | Pitch-catch (送受信対) |
| 周波数 | 50–300 kHz (Skin Mode 帯域) |
| 課題 | CNN の限界 | GNN の利点 |
|---|---|---|
| 曲面構造 | 2D投影で歪み発生 | 非ユークリッド多様体上で直接動作 |
| 不規則メッシュ | 正規グリッド前提 | 任意トポロジーのグラフに対応 |
| 局所性 | 固定カーネルサイズ | k-NN/測地線距離で適応的近傍 |
| 物理整合性 | ブラックボックス | メッセージパッシング ≈ FEM剛性行列演算 |
| スケーラビリティ | 解像度に依存 | ノード数に対して線形 |
| # | 特徴量 | 次元 | 物理的意味 |
|---|---|---|---|
| 0–2 | 座標 (x, y, z) | 3 | 空間位置 |
| 3–5 | 法線 (nx, ny, nz) | 3 | 曲面の向き、モード変換 |
| 6–9 | 曲率 (k1, k2, H, K) | 4 | 波の集束・発散 |
| 10–13 | 変位 (ux, uy, uz, u_mag) | 4 | 欠陥で局所増大 |
| 14 | 温度 T | 1 | 熱環境・CTE |
| 15–19 | 応力 (s11, s22, s12, smises, Sum_s) | 5 | 荷重伝達・主応力和 |
| 20 | 熱応力 (thermal_smises) | 1 | CTE不整合応力 |
| 21–23 | ひずみ (le11, le22, le12) | 3 | 損傷相関 |
| 24–26 | 繊維配向 (周方向) | 3 | CFRP 異方性 |
| 27–31 | 積層角度 (0/45/-45/90, circ) | 5 | 積層構成・局所繊維方向 |
| 32–33 | 境界・荷重 flag | 2 | 境界効果 |
詳細: Node-Features
4種の GNN を比較評価:
| アーキテクチャ | 特徴 | 期待される強み |
|---|---|---|
| GCN | スペクトルフィルタリング | 大域的パターン |
| GAT | アテンション機構 | 欠陥近傍への適応的重み付け |
| GIN | 最大表現力 (WL-test等価) | 微細な構造差の弁別 |
| GraphSAGE | サンプリング+集約 | スケーラビリティ |
-
Focal Loss: 欠陥ノード << 健全ノードのクラス不均衡対策 (
$\alpha=0.25, \gamma=2.0$ ) - Cosine Annealing: 学習率スケジューリング
- Early Stopping: Patience=30 で過学習防止
- 5-Fold CV: 汎化性能の信頼性評価
GNNは非ユークリッドデータに対する強力なベースラインだが、2024-2025年の研究トレンドに基づき、以下の3つのアプローチも比較検討の対象とする。これらは「計算効率」「物理的整合性」「既存資産の活用」の観点でGNNを凌駕する可能性がある。
「物理シミュレーションの代替」アプローチ
- 概要: 離散的なノード間の関係(グラフ)ではなく、関数空間上の写像(物理場の形状そのもの)を学習する。
-
利点:
- 解像度非依存 (Resolution Invariant): 学習時と異なるメッシュ解像度でも推論可能。FEMメッシュの細分化に対して再学習が不要。
- 物理的整合性: 偏微分方程式(PDE)の逆問題として定式化されるため、応力場の物理法則を学習しやすい。
-
具体的モデル:
- Geometry-Aware FNO (Geo-FNO): 曲面形状を明示的に扱える改良版。
- UNO (U-shaped Neural Operator): マルチスケール特徴抽出に優れ、微細な欠陥検知に適する。
「3D点群処理」アプローチ
- 概要: FEMノードを「3D点群」と見なし、グラフ(エッジ)を構築せずに直接処理する。
-
利点:
- 大域的受容野: Attention機構により、GNNよりも遠くのノードとの関係性を効率的に学習可能。
- 前処理不要: 複雑なグラフ構築(k-NNやDelaunay分割)が不要で、座標と物理量だけで入力可能。
-
具体的モデル:
- PointMAE (Masked Autoencoders): 欠陥データが少ない場合でも、事前学習(マスク復元タスク)により高精度な特徴表現を獲得可能。
「画像処理への帰着」アプローチ(実用性重視)
- 概要: フェアリングの円筒・円錐形状を展開(UVマッピング)し、2D画像として既存の強力な画像AIで処理する。
-
利点:
- 圧倒的な開発速度: YOLOv11やSegFormerなど、成熟した画像認識モデルをそのまま流用可能。
- 計算コスト: 3D演算が不要なため、推論・学習ともに非常に高速。
- 課題: オジャイブ(曲面)部分の展開による歪みへの対処が必要。
-
具体的モデル:
- YOLOv11-seg: リアルタイム性を重視する場合。
- SegFormer: 精度を重視する場合。
src/generate_fairing_dataset.py のパラメータと H3 実機の対応:
| パラメータ | 現行値 | H3 推定値 | 状態 |
|---|---|---|---|
RADIUS |
2,600 mm | 2,600 mm | ✅ 一致 |
HEIGHT |
5,000 mm | セクション | ✅ |
ANGLE |
60° | 1/6 対称 | ✅ |
CORE_T |
38 mm | ~38 mm | ✅ 一致 |
FACE_T |
1.0 mm | 推定 1.0–1.5 mm | ✅ 範囲内 |
LAYUP |
[45/0/-45/90]s | QI (推定) | ✅ |
| 荷重 | 値 | ソース |
|---|---|---|
| 軸圧縮 | Max Q 相当 | Epsilon Manual 参考 |
| 外圧 | 30 kPa | Max Q 時 |
| 音響 | 147–148 dB (OASPL) | Epsilon/H3 推定 |
| 温度場 | 外皮 100–200°C | JAXA文献値 |
H3 User's Manual は非公開だが、環境荷重データは Epsilon Manual で代替可能:
| 環境 | Epsilon | H3 推定 | 差異 |
|---|---|---|---|
| 音響 | 147 dB | ~148 dB | 同クラス |
| 振動・衝撃 | Notched Bolt | Notched Bolt | 同方式 |
| 熱 | 100–200°C | 100–200°C (+ 300°C 耐熱) | 同クラス |
| ソース | 内容 |
|---|---|
| JAXA H3 諸元 | フェアリング型式, PAF径 |
| JAXA H3 フェアリング | オジャイブ形状, CFRP/Al HC |
| JAXA H3 打上げ実績 | 公式打ち上げ履歴 |
| JAXA H3 F8 対応状況 | 8号機失敗の公式調査 |
| Epsilon User's Manual | p.17: "aluminum-skin" (決定的根拠), 環境荷重データ |
| JAXA-JMR-002E | ペイロード安全基準, No-Growth 要件 |
| ソース | 内容 |
|---|---|
| KHI H3 フェアリング | 製造担当, 技術概要 |
| KHI ANSWERS | パネル厚~40mm, AFP/OoA 工法詳細 |
| SPACE Media | 耐熱300°C+, 衛星保護4機能 |
| Beyond Gravity H3 | Type-W フェアリング, PSS供給 |
| ソース | 内容 |
|---|---|
| sorae — F8 原因究明 (2026/02) | PSS 内部剥離, 破壊メカニズム |
| sorae — F8 速報 (2025/12) | みちびき5号の再突入 |
| マイナビ — F8 製造不備 | PSS 4個全てに剥離確認 |
| MEXT 資料 (2026/02) | 調査・安全小委員会公式資料 |
| ソース | 内容 |
|---|---|
| Open Guided Waves (Zenodo) | 実験データベンチマーク |
| Moll et al. (2019) SHM 18(6) | OGW プラットフォーム |
| Moll et al. (2019) Scientific Data 6 | 温度変動下のガイド波データ |
| Rose, J.L. "Ultrasonic Guided Waves in Solid Media" | ガイド波の標準教科書 |
| MDPI — Recent GW Advances (2024) | ガイド波SHM最新動向 |